1.本实用新型涉及巡航控制器技术领域,具体为一种无人驾驶场地车巡航控制器。
背景技术:
2.无人驾驶场地车作为一种新型的交通工具,可应用在厂区、旅游景点、物流园区、学校、农场、危险矿区等场所,可以运输货物、载客、清扫场地、进行农业作业、危险矿区作业等。在没有人员驾驶的情况下,对速度的检测,对油门的控制就显得非常重要。防撞制动功能是其重用功能之一,而防撞制动与油门控制息息相关,当制动时,油门需要提前断开,可以减少动力损耗,可以减少制动刹车片磨损,可以缩短刹车距离;方向控制与油门对速度的控制影响同样关系密切,速度不一样,方向控制不一样,速度高,方向控制角度小,速度慢,方向控制角度大;车辆负重变化,同一速度要求下油门控制也不一样,负重大,油门控制大,负重小,油门控制小。设计一款既能检测速度又能控制油门的巡航控制器非常必要。
3.无人驾驶场地车是一种新型交通工具,无法在市场上买到现成的巡航控制器;
4.无人驾驶场地车上面的速度信号输出为0~5v直流电压模拟量,控制器无法直接判定其大小,需要ad转换成数字信号,确定速度值;
5.油门控制既要实现人工踩油门可以控制,又可以根据指令,通过程序自动控制油门通断、油门大小,自动控制需要通过da转换将数字信号转换为0~5v 直流模拟电压;
6.车辆上油门控制为开环控制,当车辆负重增加时,要实现一定速度不变,油门控制无法进行调节,无法实现闭环控制。
7.本实用设计一种无人驾驶场地车巡航控制器,通过ad转换将速度模拟信号转换为车速数字信号,通过pwm控制输出,实现油门模拟量控制,通过速度和油门2个量实现pid闭环控制。
技术实现要素:
8.本实用新型的目的在于提供一种无人驾驶场地车巡航控制器,以解决上述背景技术中提出的问题。
9.为实现上述目的,本实用新型提供如下技术方案:
10.一种无人驾驶场地车巡航控制器,包括mcu单片机、车速0~5v模拟信号与can通讯,所述mcu单片机具有ad转换模块,所述can通讯为独立的can通讯控制器和can通讯收发器,所述mcu单片机一端的所述车速0~5v模拟信号通过电阻限流电容高频滤波后接入mcu单片机的ad转换引脚,所述mcu单片机的一侧设置有脚踏板油门0~5v模拟信号,所述脚踏板油门0~5v模拟信号同样通过电阻限流电容高频滤波后接入所述mcu单片机的ad转换引脚,所述mcu单片机的另一端为油门模拟输出信号。
11.通过上述技术方案,无人驾驶场地车巡航控制器,mcu单片机具有ad转换模块,具有pwm模块,can通讯采用独立的通讯控制器和收发器,工作电源为直流5v,从接线端子直接获得;车速0~5v模拟信号通过电阻限流电容高频滤波后接入mcu单片机的ad转换引脚,脚踏
板油门0~5v模拟信号同样通过电阻限流电容高频滤波后接入mcu单片机的ad转换引脚,检测到有脚踏板油门输入信号时,系统优先将此信号通过pwm原样输出,此时控制为开环控制,为人工操作模式,速度采集信号不参与控制;通过ad采集判定油门脚踏板未踩下时,此时以can接收到的速度指令,pwm调整油门模拟输出信号,此时采集的速度信号参与到控制逻辑里,当实际速度值大于can接收到的速度值,pwm调低油门模拟输出信号,当实际速度值小于can接收到的速度值,pwm调高油门模拟输出信号,采用pid算法实现闭环控制,是车辆速度达到can接收到的速度值,在can未接收到新的速度变化之前,保持速度不变;当遇到障碍物,需要紧急制动时,此时无论人踩油门脚踏板作用,还是无人自动驾驶模式,pwm油门输出会变为0,切断油门输出,让制动距离缩短,减少刹车片磨损。同时在车辆运行全过程控制器通过can将采集的速度信号实时发送到总线上,为方向控制单元等随时获取,从而确定其控制策略。
12.优选的,所述mcu单片机至所述can通讯控制器发出的单向信号为cs片选信号、mosi主设备数据输出信号与sck同步时钟信号。
13.优选的,所述can通讯控制器至所述mcu单片机发出的单向信号为miso主设备数据输入。
14.优选的,所述can通讯控制器至所述can通讯收发器的单向信号为tx发送信号,所述can通讯控制器至所述can通讯收发器的单向信号为rx接收信号。
15.优选的,所述can通讯收发器与外部控制器信号相连。
16.与现有技术相比,本实用新型的有益效果是:
17.1. 该一种无人驾驶场地车巡航控制器,适用于无人驾驶场地车速度检测和油门控制;通过ad采集速度和脚踏板油门值,通过pwm 将其转换为模拟信号值,实现速度大小与油门开度的闭环控制。
18.2. 该一种无人驾驶场地车巡航控制器,增加了速度采集和油门开度控制的闭环控制,解决因车辆重量变化而速度无法保持一定值的难题;增加油门can通讯控制,解决了刹车前断油的难题。
附图说明
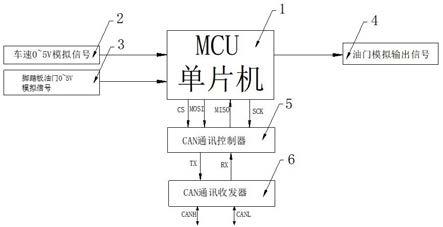
19.图1为本实用新型的整体结构示意图。
20.图中:1、mcu单片机;2、车速0~5v模拟信号;3、脚踏板油门0~5v模拟信号;4、油门模拟输出信号;5、can通讯控制器;6、can通讯收发器。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、
ꢀ“
右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、
“ꢀ
顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为
了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
23.在本专利的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”应做广义理解,例如,可以是固定相连、设置,也可以是可拆卸连接、设置,或一体地连接、设置。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本专利中的具体含义。
24.此外,术语“第一”、
ꢀ“
第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“若干”的含义是两个或两个以上,除非另有明确具体的限定。
25.请参阅图1所示,本实用新型提供的一种技术方案:
26.一种无人驾驶场地车巡航控制器,包括mcu单片机1、车速0~5v模拟信号2与can通讯,其特征在于:所述mcu单片机1具有ad转换模块,所述can通讯为独立的can通讯控制器5和can通讯收发器6,所述mcu单片机1一端的所述车速0~5v模拟信号2通过电阻限流电容高频滤波后接入mcu单片机1的ad转换引脚,所述mcu单片机1的一侧设置有脚踏板油门0~5v模拟信号3,所述脚踏板油门0~5v模拟信号3同样通过电阻限流电容高频滤波后接入所述mcu单片机1的ad转换引脚,所述mcu单片机1的另一端为油门模拟输出信号4。
27.通过上述技术方案,无人驾驶场地车巡航控制器,mcu单片机1具有ad转换模块,具有pwm模块,can通讯采用独立的通讯控制器和收发器,工作电源为直流5v,从接线端子直接获得;车速0~5v模拟信号2通过电阻限流电容高频滤波后接入mcu单片机1的ad转换引脚,脚踏板油门0~5v模拟信号3同样通过电阻限流电容高频滤波后接入mcu单片机1的ad转换引脚,检测到有脚踏板油门输入信号时,系统优先将此信号通过pwm原样输出,此时控制为开环控制,为人工操作模式,速度采集信号不参与控制;通过ad采集判定油门脚踏板未踩下时,此时以can接收到的速度指令,pwm调整油门模拟输出信号4,此时采集的速度信号参与到控制逻辑里,当实际速度值大于can接收到的速度值,pwm调低油门模拟输出信号4,当实际速度值小于can接收到的速度值,pwm调高油门模拟输出信号4,采用pid算法实现闭环控制,是车辆速度达到can接收到的速度值,在can未接收到新的速度变化之前,保持速度不变;当遇到障碍物,需要紧急制动时,此时无论人踩油门脚踏板作用,还是无人自动驾驶模式,pwm油门输出会变为0,切断油门输出,让制动距离缩短,减少刹车片磨损。同时在车辆运行全过程控制器通过can将采集的速度信号实时发送到总线上,为方向控制单元等随时获取,从而确定其控制策略。
28.优选的,所述mcu单片机1至所述can通讯控制器5发出的单向信号为cs片选信号、mosi主设备数据输出信号与sck同步时钟信号。
29.优选的,所述can通讯控制器5至所述mcu单片机1发出的单向信号为miso主设备数据输入。
30.优选的,所述can通讯控制器5至所述can通讯收发器6的单向信号为tx发送信号,所述can通讯控制器5至所述can通讯收发器6的单向信号为rx接收信号。
31.优选的,所述can通讯收发器6与外部控制器信号相连。
32.本实施例的一种无人驾驶场地车巡航控制器在使用时,无人驾驶场地车巡航控制
器,mcu单片机1具有ad转换模块,具有pwm模块,can通讯采用独立的通讯控制器和收发器,工作电源为直流5v,从接线端子直接获得;车速0~5v模拟信号2通过电阻限流电容高频滤波后接入mcu单片机1的ad转换引脚,脚踏板油门0~5v模拟信号3同样通过电阻限流电容高频滤波后接入mcu单片机1的ad转换引脚,检测到有脚踏板油门输入信号时,系统优先将此信号通过pwm原样输出,此时控制为开环控制,为人工操作模式,速度采集信号不参与控制;通过ad采集判定油门脚踏板未踩下时,此时以can接收到的速度指令,pwm调整油门模拟输出信号4,此时采集的速度信号参与到控制逻辑里,当实际速度值大于can接收到的速度值,pwm调低油门模拟输出信号4,当实际速度值小于can接收到的速度值,pwm调高油门模拟输出信号4,采用pid算法实现闭环控制,是车辆速度达到can接收到的速度值,在can未接收到新的速度变化之前,保持速度不变;当遇到障碍物,需要紧急制动时,此时无论人踩油门脚踏板作用,还是无人自动驾驶模式,pwm油门输出会变为0,切断油门输出,让制动距离缩短,减少刹车片磨损。同时在车辆运行全过程控制器通过can将采集的速度信号实时发送到总线上,为方向控制单元等随时获取,从而确定其控制策略。
33.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的仅为本实用新型的优选例,并不用来限制本实用新型,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。