1.本发明涉及水下基床整平技术领域,特别涉及一种水下抛石基床整平装置及其整平方法。
背景技术:
2.水下抛石基床整平是水工工程中非常重要的环节。抛石基床是用块石抛填的基床,为使基床顶标高符合设计要求,以及便于平稳安装上部预制构件,基床顶面需按设计要求进行细平或极细平,抛石基床的整平精度直接影响着预制构件着床的最终成型精度。
3.传统的水下抛石基床整平工艺通常是在水下整平轨放设完毕经验收合格后,通过船舶将块石、二片石和大粒径碎石运至施工现场,潜水员指挥抛石工向基床投料。潜水员水下推动刮道刀进行整平,并填平刮刀下的空隙,多余的石料用吊篮吊上船,不足由船上投料补充。为保证基床的密实度,整平时以刮道底为准,对深度20
‑
50cm间的低洼处,先用乱石粗平,然后对块石间不平的部分用二片石填充,二片石间不平部分用碎石填充。因该类工程环境面临水深、浪大的自然条件,潜水员水下施工困难、效率降低。
技术实现要素:
4.本发明的其中一个目的是提供一种水下抛石基床整平装置,能够高效的精确的对水下抛石基床进行整平作业。
5.本发明的上述技术目的是通过以下技术方案得以实现的:一种水下抛石基床整平装置,包括移动平台,所述移动平台的两端分别固定有卷锚机,所述卷锚机连接有锚缆;所述移动平台上设置有下料管以及用于驱动下料管沿移动平台宽度方向进行运动的下料运动驱动单元,所述下料管延伸至所述移动平台下方。
6.通过采用上述方案,通过在移动平台上设置延伸至移动平台下方的下料管,进而利用下料管向水下抛石基床进行投放石料;通过在移动平台的两端设置卷锚机,在将移动平台移动至对应的整平作业位置后,移动平台一端的卷锚机进行放缆作业,移动平台另一端的卷锚机的卷锚机作收缆作业,进而使移动平台沿其长度方向进行控制,通过对卷锚机的转速以及转动量进行控制,进而能够精确的对移动平台的移动速度进行位移量进行控制;下料运动驱动单元驱动下料管沿移动平台宽度方向进行运动,通过移动平台的运动协同下料管自身的运动,进而使下料管能够在平面区域内进行运动;进而通过控制下料管投放石料的多少,能够高效精确的水下抛石基床进行整平作业。
7.较佳的,所述移动平台上设置有用于计量下料的计量斗,所述下料管与计量斗相连通;所述移动平台上固定有沿移动平台宽度方向设置的轨道,所述下料运动驱动单元用于驱动计量斗沿轨道长度方向进行运动。
8.通过采用上述方案,通过设置计量斗对由下料管投放的石料量进行控制,并且通过设置下料运动驱动单元以及轨道,驱动计量斗沿移动平台宽度方向进行移动,从而加能够高效方便的对下料管进行横向驱动。
9.较佳的,所述移动平台上设置有用于对物料进行传输的传输机构,所述传输机构的出料端位于计量斗进料口的上方,所述传输机构的端部设置有用于与计量斗连通的进料软管。
10.通过采用上述方案,通过设置传输机构,使用传输机构的出料端位于计量斗进料口的上方,并且利用进料软管将传输机构与计量斗相连,进而在计量斗移动过程中,能够对计量斗进行原料的添加和补充,操作方便。
11.较佳的,所述移动平台设置有多波束探测仪以及控制单元;所述多波束探测仪位于移动平台下部;所述多波束探测仪用于对用于对水下抛石基床进行三维特征扫描,并且将扫描数据发送给控制单元;所述控制单元根据多波束探测仪发送的扫描数据生成平台运动驱动信息、下料运动驱动信息以及计量信息,并且分别将平台运动驱动信息、下料运动驱动信息以及计量信息发送给卷锚机、下料运动驱动单元以及计量斗;所述卷锚机根据平台运动驱动信息控制锚缆的收放,所述下料驱动运动单元根据下料驱动信息驱动计量斗沿轨道长度方向进行运动;所述计量斗根据计量信息对下料量进行控制。
12.通过采用上述方案,通过设置多波束探测仪以及控制单元,进而通过多波束探测仪对水下抛石基床进行地形扫描,从而根据水下抛石基床的地形,控制单元卷锚机、下料运动驱动单元以及计量斗进行协同作业,从而能够更加精确高效的进行下料。
13.较佳的,所述移动平台上设置有gps定位单元,所述gps定位单元用于对移动平台进行定位,生成平台位置信息,并且将平台位置信息发送给控制单元,所述控制单元根据平台位置对移动平台位置进行定位判断。
14.通过采用上述方案,通过设置gps定位单元,对移动平台的位置进行采集,进而能够方便快捷的对移动平台进行位置判断以及移动定位。
15.较佳的,所述传输机构为皮带传输线,所述皮带传输线由其进料端向其出料端倾斜向上。
16.通过采用上述方案,通过设置皮带传输线作为传输机构,进而能够连续的对计量斗进行上料,操作高效便捷。
17.较佳的,所述皮带传输线的进料端设置有下料斗,所述下料斗的出料口位于皮带传输线的进料端上方。
18.通过采用上述方案,通过设置下料斗对皮带传输线进行上料,操作方便,高效便捷。
19.较佳的,所述移动平台每端设置的卷锚机数量为两个,两个卷锚机分别位于移动平台两侧。
20.通过采用上述方案,通过在移动平台的每端设置两个卷锚机,进而在对移动平台进行驱动时,两个卷锚机协同作业,进而减小移动平台在移动时的横向偏摆。
21.本发明的其中一个目的是提供一种水下抛石基床整平方法,能够高效的精确的对水下抛石基床进行整平作业。
22.本发明的上述技术目的是通过以下技术方案得以实现的:一种水下抛石基床整平方法,采用上述的水下抛石基床整平装置,其特征在于,包括以下步骤:
23.步骤s1,多波束探测仪对水下抛石基床进行三维特征扫描,对水下抛石基床的各个点的三维坐标进行采集,根据水下抛石基床的各个点的三维坐标生成基床空间点集数
据,并且将基床空间点集数据发送给控制单元;
24.步骤s2,控制单元根据基床空间点集数据生成基床三维模型,控制单元以移动平台行进方向作为x轴,以轨道长度为y轴,以高度方向为z轴,生成笛卡尔运动坐标系;控制单元在z轴方向上将基床三维模型分割成多个打印层,每个打印层在x轴方向上分割成多个打印区段;
25.步骤s3,控制单元从下到上对各个打印层进行逐层处理,每一打印层从一端向另一端逐个打印区段进行处理;
26.控制单元对打印层上的各点的坐标进行读取,根据当前点的x轴坐标生成x轴位移信息,并且将x轴位移信息发送给卷锚机,根据当前点的y轴坐标生成y轴位移信息,并且将y位移信息发送给下料运动驱动单元,根据当前点的z轴坐标生成下料量信息,并且将下料量信息发送给计量斗。
27.通过采用上述方案,在对水下基床进行整平作业时,通过多波束探测仪对水下抛石基床的各个点的三维坐标进行采集,根据水下抛石基床的各个点的三维坐标生成基床空间点集数据,进而控制单元根据采集的基床空间点集数据生成基床三维模型,通过建立笛卡尔运动坐标系,进而通过在z轴方向上将基床三维模型分割成多个打印层,每个打印层在x轴方向上分割成多个打印区段,对水下抛石基床进行逐层逐区段的进行整平处理,通过各个点的x轴坐标、y轴坐标以及z轴坐标,确定卷锚机、下料运动驱动单元的驱动量以及计量斗对应位置的下料量,从而能够高效精确的对水下抛石基床进行整平作业。
28.较佳的,gps定位单元对移动平台进行定位,生成平台位置信息,并且将平台位置信息发送给控制单元;所述控制单元根据平台位置以及对应打印区段起始点坐标,生成定位驱动信息,并且将定位驱动信息发送给卷锚机;所述卷锚机根据定位驱动信息驱动移动平台沿x轴进行运动,将下料管移动至对应x轴坐标位置。
29.通过采用上述方案,通过gps定位单元对移动平台进行定位,进而控制单元根据当前移动平台的坐标位置,进而对卷锚机进行驱动,进而能够快速将下料管移动至对应x轴坐标位置,方便进行快速定位。
30.综上所述,本发明具有以下有益效果:
31.1、在对水下基床进行整平作业时,通过多波束探测仪对水下抛石基床的各个点的三维坐标进行采集,根据水下抛石基床的各个点的三维坐标生成基床空间点集数据,进而控制单元根据采集的基床空间点集数据生成基床三维模型,通过建立笛卡尔运动坐标系,进而通过在z轴方向上将基床三维模型分割成多个打印层,每个打印层在x轴方向上分割成多个打印区段,对水下抛石基床进行逐层逐区段的进行整平处理,通过各个点的x轴坐标、y轴坐标以及z轴坐标,确定卷锚机、下料运动驱动单元的驱动量以及计量斗对应位置的下料量,从而能够高效精确的对水下抛石基床进行整平作业。
32.2、通过设置皮带传输线以及上料斗,皮带传输线以及计量斗之间通过进料软管相连,通过上料斗进行下料,进而利用皮带传输线将石块物料传输至计量斗上方,从而在重力的作用下,利用进料软管将石块物料加入到计量斗中,从而能够高效的对计量斗进行上料。
附图说明
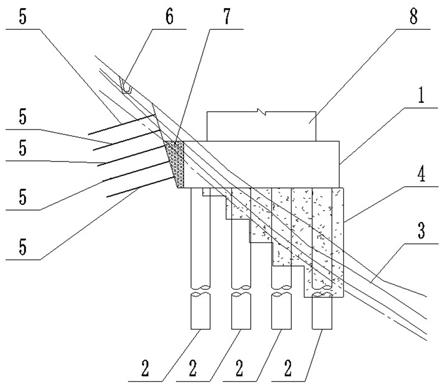
33.图1是水下抛石基床整平装置的结构示意图。
34.图2是水下抛石基床整平装置的控制框图。
35.图3是体现体现下料运动驱动单元的结构示意图。
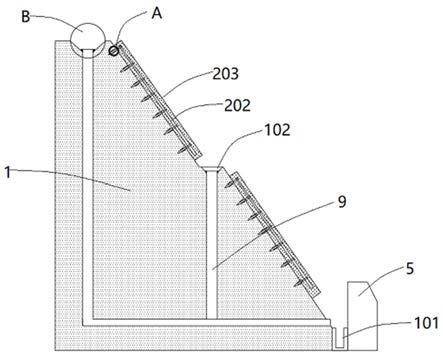
36.图4是多波束探测仪安装方式的结构示意图。
37.图中,1、移动平台;11、排料口;12、安装槽;13、轨道;131、基轨;132、槽型轨;2、皮带传输线;3、计量斗;31、进料软管;32、下料管;4、上料斗;5、升降液压缸;51、支撑组件;511、支撑套;512、支撑杆;6、多波束探测仪;7、下料运动驱动单元;71、驱动架;72、连接轴;73、滚轮;74、下料伺服驱动电机;8、卷锚机;81、锚缆;9、gps定位单元;10、控制单元。
具体实施方式
38.以下结合附图对本发明作进一步详细说明。其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“底面”和“顶面”、“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
39.实施例1:
40.一种水下抛石基床整平装置,参照图1,包括移动平台1,移动平台1上设置有用于对物料进行传输的传输机构以及用于对物料进行计量下料的计量斗3。传输机构为皮带传输线2,皮带传输线2由进料端一端向出料端一端倾斜向上;皮带传输线2的进料端上方设置有上料斗4。皮带传输线2的出料端设置有与计量斗3的进料口相连的进料软管31。上料斗4为电动控制,通过上料斗4将碎石等物料放料到皮带传输线2上,进而通过皮带传输线2将物料传输至计量斗3上方,进而通过进料软管31将物料排放到计量斗3中。移动平台1底部开设有长度方向沿移动平台1宽度方向设置的长条形排料口11,计量斗3连通有下料管32,下料管32轴向穿过排料口11。移动平台1甲板上固定有沿移动平台1宽度方向的轨道13,计量斗3设置有控制计量斗3沿轨道13长度方向进行运动的下料运动驱动单元7。
41.参照图1,移动平台1的两端分别设置有两个卷锚机8,并且每端的两个卷锚机8分别位于移动平台1两侧。卷锚机8连接有锚缆81,在移动平台1移动至设置位置后,同将卷锚机8的锚缆81端部固定在水下基床上,移动平台1一端的两个卷锚机8作收缆作业,移动平台1另一端的两个卷锚机8作放缆作业,进而驱动移动平台1沿移动平台1长度方向进行运动。移动平台1的每端均设置两个卷锚机8进行协同作业,进而在对移动平台1进行驱动时,移动平台1不易发生横向偏摆。
42.参照图1和图2,移动平台1上还设置有控制单元10以及gps定位单元9。计量斗3以及卷锚机8均受控于控制单元10。控制单元10采用微型计算机、plc等工控平台,具有数据处理、数据存储等功能,用于对水下抛石基床整平装置的整平下料进行过程控制。移动平台1的下部还设置有用于对水下抛石基床的地形特征进行扫描的多波束探测仪6。多波束探测仪6用于对用于对水下抛石基床进行三维特征扫描,并且将扫描数据发送给控制单元10;控制单元10根据多波束探测仪6发送的扫描数据生成平台运动驱动信息、下料运动驱动信息以及计量信息,并且分别将平台运动驱动信息、下料运动驱动信息以及计量信息发送给卷锚机8、下料运动驱动单元7以及计量斗3;卷锚机8根据平台运动驱动信息控制锚缆81的收放,下料驱动运动单元根据下料驱动信息驱动计量斗3沿轨道13长度方向进行运动;计量斗3根据计量信息对下料量进行控制。
43.参照图3,轨道13包括与移动平台1固定连接的基轨131以及分别固定于基轨131上部两侧的槽型轨132。下料运动驱动单元7包括固定于计量斗3下部的驱动架71,驱动架71的两端分别设置有与驱动架71转动连接的连接轴72,连接轴72的两端分别固定有槽型轨132滚动接触的滚轮73;两连接轴72之间设置有用于同步传动组件,同步传动组件包括分别固定在两连接轴72上的传动轮以及套设在两传动轮之间的传动带。驱动架71上设置有驱动连接轴72进行转动的下料伺服驱动电机74,下料伺服驱动电机74的机体固定在驱动架71上,下料伺服驱动电机74的输出轴与其中一个连接轴72固定连接。下料伺服驱动电机74响应于控制单元10发送的控制信号,进而能够在控制单元10的控制下,驱动计量斗3沿轨道13长度方向进行运动。
44.参照图1和图4,下料口两侧的移动平台1底部分别设置有安装槽12,安装槽12内设置有升降液压缸5。升降液压缸5的活塞杆竖直设置,升降液压缸5的缸体与移动平台1固定连接。多波束探测仪6固定于升降液压缸5端部。水下抛石基床整平装置进行作业时,升降液压缸5的活塞杆处于伸长状态,将多波束探测仪6探出移动平台1底部,进而使用多波束探测仪6对水下抛石基床的地形特征进行检测。在不使用多波束探测仪6进行作业时,升降液压缸5的活塞杆处于收缩状态,多波束探测仪6收纳于安装槽12中。通过将多波束探测仪6收纳于安装槽12中,进而减小在日常移动平台1运动时,水流对多波束探测仪6的冲击。
45.参照图1和图4,安装槽12内设置有支撑组件51,支撑组件51包括支撑套511以及若干个设置于支撑套511四周的支撑杆512。支撑杆512倾斜设置,支撑杆512的下端与支撑套511铰接,支撑杆512的上端与安装槽12侧壁铰接。通过支撑套511对升降液压缸5的活塞杆进行约束,并且通过支撑杆512对支撑套511进行周向支撑,从而减小在水流作用下,升降液压缸5的活塞杆的弯曲偏摆,使多波束探测仪6的检测结果更加精确。
46.实施例2:
47.一种水下抛石基床整平方法,采用了实施例1中的水下抛石基床整平装置,包括以下步骤:
48.步骤s1,多波束探测仪6对水下抛石基床进行三维特征扫描,对水下抛石基床的各个点的三维坐标进行采集,根据水下抛石基床的各个点的三维坐标生成基床空间点集数据,并且将基床空间点集数据发送给控制单元10。每个点的坐标形式为(x,y,z),基床空间点集数据为{(x1,y1,z1),(x2,y2,z2),...xn,yn,zn)}。
49.步骤s2,控制单元10根据基床空间点集数据生成基床三维模型,基床三维模型为由基床空间点集数据拟合的三维实体模型。控制单元10以移动平台1行进方向作为x轴,以轨道13长度为y轴,以高度方向为z轴,生成笛卡尔运动坐标系;控制单元10在z轴方向上将基床三维模型分割成多个打印层,每个打印层在x轴方向上分割成多个打印区段。在打印层上的各个点的z坐标相同,在某一打印层上,z=m,则对改层进行整平作业时,各个点对应的下料高度为m
‑
z,z为当前位置处点的实际z轴坐标。
50.步骤s3,控制单元10从下到上对各个打印层进行逐层处理,每一打印层从一端向另一端逐个打印区段进行处理。控制单元10对打印层上的各点的坐标进行读取,根据当前点的x轴坐标生成x轴位移信息,并且将x轴位移信息发送给卷锚机8,根据当前点的y轴坐标生成y轴位移信息,并且将y位移信息发送给下料运动驱动单元7,根据当前点的z轴坐标生成下料量信息,并且将下料量信息发送给计量斗3。控制单元10在对下料管32进行驱动控制
时,卷锚机8以及下料运动驱动单元7单独作业,即先x=n的所有坐标点进行处理,在依次对x=n 1、x=n 2等坐标点进行处理,即在空间上,下料管32呈s型运动。
51.水下抛石基床整平装置进行整平作业时,gps定位单元9对移动平台1进行定位,生成平台位置信息,并且将平台位置信息发送给控制单元10;所述控制单元10根据平台位置以及对应打印区段起始点坐标,生成定位驱动信息,并且将定位驱动信息发送给卷锚机8;所述卷锚机8根据定位驱动信息驱动移动平台1沿x轴进行运动,将下料管32移动至对应x轴坐标位置。通过gps定位单元9对移动平台1进行定位,进而控制单元10根据当前移动平台1的坐标位置,进而对卷锚机8进行驱动,进而能够快速将下料管32移动至对应x轴坐标位置,方便进行快速定位。
52.本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。