1.本发明涉及一种采用多杆机构的腿部结构及其构建的四足机器人,属于四足机器人领域。
背景技术:
2.由于轮式机器人对崎岖路面和松软地面适应性不够高,而足式机器人对崎岖路面却具有较强的适应能力。与双足机器人相比,四足机器人更加稳定,与六足机器人相比,四足机器人结构更加简单,所以近年来,四足机器人一直是一个比较火热的研究课题。凭借着其优良的性能,四足机器人能够作为野外作业的运输工具,危险环境下的侦测工具以及服务型机器人,故四足机器人具有广阔的运用场景。然而目前全球范围内的四足机器人大多数还停留在实验室阶段,由于技术方面的问题,很多机器人还难以适应复杂的野外环境。而考虑到市场对四足机器人的巨大需求,让四足机器人更平稳地在复杂地形行走成为了亟需解决的问题。
3.四足机器人可有多种驱动方式,其中电驱动是四足机器人领域内被广泛选择的一种驱动方式。若将驱动电机直接安装在膝关节上,会增加腿部结构的转动惯量,不利于四足机器人的稳定性。进一步地,四足机器人通过传动机构带动大腿和小腿运动,在众多传动方式中,人们最常选用带传动,链传动两种传动方式。其中带传动具有抗冲击和振动载荷,运转平稳,噪声小等优点,但是若需要传递的力矩较大,则需要增加带和带轮的宽度,这样会使传动机构在电机输出轴的轴向尺寸较大,会增加四足机器人的体积。链传动具有承载能力高,对恶劣的工作环境适应性较强,并且效率高等特点,链条中的每一个链节均是间歇性地与链轮啮合,单个链节在与链轮啮合或脱离链轮的过程中会产生一定冲击和振动,故工作时噪声较大,并且链传动的瞬时传动比不准确。
技术实现要素:
4.本发明提供了一种采用多杆机构的腿部结构,通过多杆机构构建了腿部机构,为机器人的足端运动提供新的方式,提供了一种采用多杆机构的腿部结构构建的四足机器人,可以用于实现四足机器人不同步态的行走。
5.本发明的技术方案是:一种采用多杆机构的腿部结构,包括大腿、大腿摆杆11、小腿摆杆13、小腿16;其中,大腿与小腿16铰接,大腿摆杆11的转动带动大腿转动,小腿摆杆13的转动带动小腿16转动。
6.通过驱动电机输出轴ⅰ9驱动与其连接的大腿摆杆11转动,大腿摆杆11转动带动滚子ⅰ10在大腿摆杆11上的滚道m内滚动,从而带动与滚子ⅰ10连接的大腿转动;驱动电机输出轴ⅱ8驱动与其连接的小腿摆杆13转动,小腿摆杆13转动带动滚子ⅱ15在小腿摆杆13上的滚道n内滚动,从而带动与滚子ⅱ15连接的小腿16转动;通过控制驱动电机输出轴ⅰ9和驱动电机输出轴ⅱ8的转速和转角,实现大腿、小腿16的联动,从而用于获得足端轨迹;其中,驱动电机输出轴ⅰ9与大腿转动中心同轴。
7.所述大腿呈v形,分为大腿节段a和大腿节段b,以大腿节段a中心线和大腿节段b中心线所成角的顶点为圆心开铰接孔c;大腿节段a中心线上从自由端往夹角方向开有带螺纹的滚子安装孔a、定位孔b,滚子ⅰ10通过螺纹连接安装在滚子安装孔a中,定位孔b用于确定大腿相对于躯干3的初始位置、用于固定大腿与躯干3;大腿节段b中心线上从自由端往夹角方向开有铰接孔e、定位孔d,定位孔d用于确定小腿16相对于大腿的初始位置、用于固定大腿与小腿,铰接孔e用于将小腿16铰接在大腿上。
8.所述小腿16呈v形,分为小腿节段c和小腿节段d,以小腿节段c中心线与小腿节段d中心线所成角的顶点为圆心开铰接孔h,用于将小腿16铰接在大腿的铰接孔e上;小腿节段c上从自由端往夹角方向开有带螺纹的滚子安装孔f、定位孔g,滚子ⅱ15通过螺纹连接安装在滚子安装孔f中,定位孔g用于确定小腿16相对于大腿的初始位置、用于固定大腿与小腿。
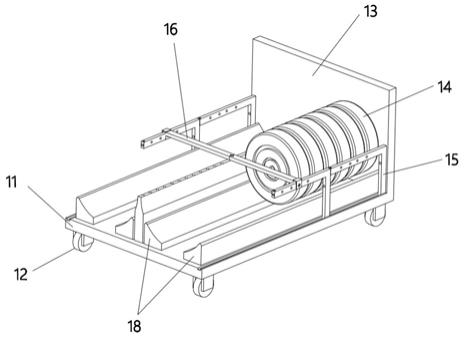
9.一种采用多杆机构的腿部结构的四足机器人,包括采用多杆机构的腿部结构,还包括躯干3、控制器1、驱动器2;
10.所述腿部结构采用四条,分别为左前腿7、右前腿6、左后腿5、右后腿4,两条左腿的结构与两条右腿的结构关于躯干的中垂面镜像对称;左前腿7、左后腿5结构相同,右前腿6、右后腿4结构相同,前大腿12、后大腿17的区别仅在于:前大腿12的夹角为锐角,后大腿17的夹角为钝角;其中,左前腿7、右前腿6中的大腿为前大腿12,左后腿5、右后腿4中的大腿为后大腿17;
11.所述控制器1和驱动器2安装在躯干3上,驱动器2接收到控制器1的信号后驱使驱动电机做出相应的转动,进而带动对应的驱动电机输出轴转动。
12.所述左前腿7通过大腿上的铰接孔c与安装在躯干3左侧的躯干外侧板14上的铰接孔i铰接在躯干3上,右前腿6通过大腿上的铰接孔c与安装在躯干3右侧的躯干外侧板14上的铰接孔i铰接在躯干3上;左后腿5通过大腿上的铰接孔c与安装在躯干3左侧的躯干外侧板14上的铰接孔l铰接在躯干3上,右后腿4通过大腿上的铰接孔c与安装在躯干右侧的躯干外侧板14上的铰接孔l铰接在躯干3上。
13.本发明的有益效果是:本发明采用大腿、小腿、大腿摇杆、小腿摇杆组成的多杆机构传动,整个传动机构在电机输出轴的轴向尺寸无需较大也能保证有效传动效果,多杆传动机构会使整个四足机器人的结构更加紧凑;再进一步地较比链传动的方式,本发明中的滚子始终与滚道两侧面相贴合并在滚道内来回滚动,瞬时传动比准确,且不存在冲击与振动,有利于四足机器人的平稳运行。整个结构中,大腿摆杆小腿摆杆直接由电机驱动,根据三角形定理便可轻易求出大腿摆杆转角与大腿转角的关系,小腿摆杆转角与小腿转角的关系,当大腿转角和小腿转角确定后便可轻易求出足端轨迹与两个电机输出轴转角之间的关系。因此,若已知驱动电机的转角,便能轻易建立正运动学关系式来求出足端轨迹。同理,若是在已知足端轨迹的情况下,也易于建立逆运动学关系式来求出驱动电机的转角。在规划好足端轨迹后,在控制器中输入根据逆运动学关系式求出来的电机转角后,就能轻易实现预定足端轨迹。此外,多杆机构对加工和安装精度要求不高,可以降低加工制造成本。
附图说明
14.图1为本发明四足机器人结构示意图;
15.图2为前大腿示意图;
16.图3为后大腿示意图;
17.图4为小腿示意图;
18.图5为大腿摆杆示意图;
19.图6为小腿摆杆示意图;
20.图7为躯干外侧板示意图;
21.图8为右前腿整体结构示意图;
22.图9为初始位置时的右前腿结构示意图;
23.图10为运动中右前腿的结构示意图;
24.图11为右后腿整体结构示意图;
25.图12为初始位置时的右后腿结构示意图;
26.图13为运动中右后腿的结构示意图;
27.图中各标号为:1
‑
控制器;2
‑
驱动器;3
‑
躯体;4
‑
右后腿;5
‑
左后腿;6
‑
右前腿;7
‑
左前腿;8
‑
驱动电机输出轴ⅱ;9
‑
驱动电机输出轴ⅰ;10
‑
滚子ⅰ;11
‑
大腿摆杆;12
‑
前大腿;13
‑
小腿摆杆;14
‑
躯体外侧板;15滚子ⅱ;16
‑
小腿;17
‑
后大腿;a
‑
大腿节段a;b
‑
大腿节段b;c
‑
小腿节段c;d
‑
小腿节段d;a
‑
滚子安装孔a;b
‑
定位孔b;c
‑
铰接孔c;d
‑
定位孔d;e
‑
铰接孔e;f
‑
滚子安装孔f;g
‑
定位孔g;h
‑
铰接孔h;i
‑
铰接孔i;j
‑
定位孔j;k
‑
定位孔k;l
‑
铰接孔l。
具体实施方式
28.实施例1:如图2
‑
13所示,一种采用多杆机构的腿部结构,包括大腿、大腿摆杆11、小腿摆杆13、小腿16;其中,大腿与小腿16铰接,大腿摆杆11的转动带动大腿转动,小腿摆杆13的转动带动小腿16转动。所述各摆杆上设有滚道,分别安装在大腿与小腿上的滚子可在滚道内以凸轮轨迹运动,从而实现摆杆与腿的联动。此方式克服了链传动、带传动在体积大小、传动平稳性等方面的缺点。本发明的各腿部结构运动空间大,容易实现各种理想足端轨迹与步态,结构简单,质量轻,能够实现在崎岖路面的平稳运行。
29.进一步地,通过驱动电机输出轴ⅰ9驱动与其连接的大腿摆杆11转动,大腿摆杆11转动带动滚子ⅰ10在大腿摆杆11上的滚道m内滚动,从而带动与滚子ⅰ10连接的大腿转动;驱动电机输出轴ⅱ8驱动与其连接的小腿摆杆13转动,小腿摆杆13转动带动滚子ⅱ15在小腿摆杆13上的滚道n内滚动,从而带动与滚子ⅱ15连接的小腿16转动;通过控制驱动电机输出轴ⅰ9和驱动电机输出轴ⅱ8的转速和转角,实现大腿、小腿16的联动,从而用于获得足端轨迹;其中,驱动电机输出轴ⅰ9与大腿转动中心同轴。所述大腿摆杆11与驱动电机输出轴ⅰ9可以通过键连接在一起,小腿摆杆13与驱动电输出轴ⅱ8可以通过键连接在一起。
30.进一步地,可以设置所述大腿呈v形,分为大腿节段a和大腿节段b,以大腿节段a中心线和大腿节段b中心线所成角的顶点为圆心开铰接孔c,用于将大腿铰接于四足机器人躯干外侧板14上,构成机器人的髋关节;大腿节段a中心线上从自由端往夹角方向开有带螺纹的滚子安装孔a、定位孔b,滚子ⅰ10通过螺纹连接安装在滚子安装孔a中,定位孔b用于确定大腿相对于躯干3的初始位置、用于固定大腿与躯干3;大腿节段b中心线上从自由端往夹角方向开有铰接孔e、定位孔d,定位孔d用于确定小腿16相对于大腿的初始位置、用于固定大腿与小腿,铰接孔e用于将小腿16铰接在大腿上,构成机器人的膝关节。滚子ⅰ10与躯干外侧板14无连接关系。
31.进一步地,可以设置所述小腿16呈v形,分为小腿节段c和小腿节段d,以小腿节段c中心线与小腿节段d中心线所成角的顶点为圆心开铰接孔h,用于将小腿16铰接在大腿的铰接孔e上;小腿节段c上从自由端往夹角方向开有带螺纹的滚子安装孔f、定位孔g,滚子ⅱ15通过螺纹连接安装在滚子安装孔f中,定位孔g用于确定小腿16相对于大腿的初始位置、用于固定大腿与小腿。小腿摆杆13与前大腿12和后大腿17均不相连接,滚子ⅱ15与前大腿12和后大腿17也均不相连接。
32.当四足机器人处于非工作状态时,将定位销同时穿过前大腿上的定位孔b和躯干外侧板14上的定位孔j,可以固定前大腿12与躯干3的位置。将定位销同时穿过后大腿17上的定位孔b和躯干外侧板14上的定位孔k,可以固定后大腿与躯干3的位置。将定位销同时穿过定位孔d和定位孔g,可以固定大腿与小腿16的相对位置。也能让四足机器人在非工作状态时站稳。
33.如图1
‑
13所示,一种采用多杆机构的腿部结构的四足机器人,包括采用多杆机构的腿部结构,还包括躯干3、控制器1、驱动器2;所述腿部结构采用四条,分别为左前腿7、右前腿6、左后腿5、右后腿4,两条左腿的结构与两条右腿的结构关于躯干的中垂面镜像对称;左前腿7、左后腿5结构相同,右前腿6、右后腿4结构相同,前大腿12、后大腿17的区别仅在于:前大腿12的夹角为锐角,后大腿17的夹角为钝角;其中,左前腿7、右前腿6中的大腿为前大腿12,左后腿5、右后腿4中的大腿为后大腿17;所述控制器1和驱动器2通过螺栓安装在躯干3上,驱动器2接收到控制器1的信号后驱使驱动电机做出相应的转动,进而带动对应的驱动输出轴转动。
34.本技术中将驱动电机输出轴ⅰ9与大腿转动中心同轴,即小腿电机轴与大腿转动中心同轴,进一步设计前大腿12的夹角为锐角,后大腿17的夹角为钝角,基于该设计,可将大腿驱动电机集中布置在前髋关节与后髋关节之间;通过整个设计可以减小电机重量给四足机器人带来的倾覆力矩,增加四足机器人的稳定性;同时可以避免大腿直驱方式下,需要增加小腿摆杆长度等造成传递的力比较小,不好用力的不足,也可避免小腿采用直驱方式造成膝关节负载过大导致机器人稳定性不足的问题。
35.进一步地,所述左前腿7通过大腿上的铰接孔c与安装在躯干3左侧的躯干外侧板14上的铰接孔i铰接在躯干3上,右前腿6通过大腿上的铰接孔c与安装在躯干3右侧的躯干外侧板14上的铰接孔i铰接在躯干3上;左后腿5通过大腿上的铰接孔c与安装在躯干3左侧的躯干外侧板14上的铰接孔l铰接在躯干3上,右后腿4通过大腿上的铰接孔c与安装在躯干右侧的躯干外侧板14上的铰接孔l铰接在躯干3上。躯干外侧板14可以通过螺栓安装在躯干3上。
36.进一步地,可以设置所述躯干外侧板14、大腿、小腿16上开有用于减重的凹槽;所述大腿摆杆11、小腿摆杆13采用阶梯结构,可以进一步利于整个结构中的零件布局。
37.在本发明中,所述驱动电机输出轴ⅰ9直接带动大腿摆杆11转动,大腿摆杆11转动后,安装在大腿上的滚子ⅰ10便会在大腿摆杆11的滚道内滚动,从而带动大腿转动。驱动电机输出轴ⅱ8直接带动小腿摆杆13转动,小腿摆杆13转动后,安装在小腿上的滚子ⅱ15便会在小腿摆杆13的滚道内滚动,从而带动小腿16转动。通过控制驱动电机输出轴ⅰ9和驱动电机输出轴ⅱ8的转速和转角,便可实现大小腿的联动,可以很容易地得到所需的足端轨迹。大腿和小腿16的协同转动,便实现了四足机器人的单腿运动。在实现单腿的理想运动轨迹
后,通过控制器1设置各腿部之间的相位差,便可实现四足机器人不同步态的行走,如对角步态,蹦跃步态,疾驰步态等。
38.上面结合附图对本发明的具体实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。