1.本发明涉及家用电器技术领域,尤其涉及预测偏心的方法、脱水的方法、衣物处理设备和存储介质。
背景技术:
2.衣物处理设备在脱水时,由于负载的分布不均匀会产生偏心,当偏心过大时会产生较大的离心力,对衣物处理设备的机械结构造成破坏,并引起高辐射的噪声和振动。
技术实现要素:
3.本发明实施例的目的在于,提供预测偏心的方法、脱水的方法、衣物处理设备和存储介质。
4.本发明实施例提供的一种预测衣物处理设备内滚筒系统偏心的方法,包括:
5.获取实际负载量;
6.获取负载量与振幅比之间的第一标定关系,其中,振幅比为相同负载量下,滚筒系统在高转速运行并趋于稳定时的高转速振幅与其在共振转速运行时的共振振幅之间的比值,高转速大于共振转速;
7.根据实际负载量和第一标定关系确定与实际负载量对应的特定振幅比;
8.获取实际负载量下的特定共振振幅;
9.根据特定振幅比和特定共振振幅确定实际负载量下的特定高转速振幅;
10.获取偏心量与高转速振幅之间的第二标定关系;
11.根据特定高转速振幅和第二标定关系确定实际负载量下的特定高转速偏心量。
12.可选地,获取第一标定关系包括:获取不同负载量下的高转速振幅和共振振幅,并将前者与后者的比值确定为不同负载量对应的振幅比;将不同负载量m与对应的振幅比之间的映射关系确定为第一标定关系。
13.可选地,获取第二标定关系包括:获取不同偏心量下的高转速振幅;将不同偏心量与对应的高转速振幅之间的映射关系确定为第二标定关系。
14.本发明实施例还提供一种衣物处理设备,其包括滚筒系统、处理器和存储器,存储器上存储有可在处理器上运行的计算机程序,该计算机程序被处理器执行时实现预测衣物处理设备内滚筒系统偏心的方法。
15.本发明实施例还提供一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序,该计算机程序被执行时实现预测衣物处理设备内滚筒系统偏心的方法。
16.本发明实施例还提供另一种通过衣物处理设备的滚筒系统脱水的方法,包括:
17.a.获取实际负载量以及负载量与振幅比之间的第一标定关系,其中,振幅比为相同负载量下滚筒系统在高转速运行时的趋于稳定后的高转速振幅与在共振转速运行时的共振振幅之间的比值,高转速大于共振转速;
18.b.根据实际负载量和第一标定关系确定与实际负载量对应的特定振幅比;
19.c.获取实际负载量下的特定共振振幅;
20.d.根据特定振幅比和特定共振振幅确定实际负载量下的特定高转速振幅a1;
21.e.获取偏心量与高转速振幅之间的第二标定关系;
22.f.根据特定高转速振幅和第二标定关系确定实际负载量下的特定高转速偏心量;
23.g.获取偏心量阈值;
24.h.判断特定高转速偏心量是否小于或等于偏心量阈值,若是,则将转速提高至高转速进行脱水,若否,则降低转速以改变负载分布并重复步骤c至h。
25.可选地,降低转速以改变负载分布包括降低转速以将负载抖散、然后上升转速以使负载重新贴筒。
26.可选地,获取第一标定关系包括:获取不同负载量下的高转速振幅和共振振幅,并将前者与后者的比值确定为不同负载量对应的振幅比;将不同负载量与对应的振幅比之间的映射关系确定为第一标定关系。
27.可选地,获取第二标定关系包括:获取不同偏心量下的高转速振幅;将不同偏心量与对应的高转速振幅之间的映射关系确定为第二标定关系。
28.可选地,负载量为衣物处理设备内负载的质量。
29.可选地,高转速振幅为滚筒系统在高转速的脱水过程中产生的振幅。
30.可选地,共振振幅为滚筒系统在脱水过程中发生共振时产生的振幅。
31.可选地,偏心量为在脱水过程中由负载分布不均匀形成的不平衡质量。
32.可选地,衣物处理设备包括滚筒式的衣物处理设备。
33.可选地,滚筒式的衣物处理设备的共振转速大于或等于每分钟150转并小于或等于每分钟300转。
34.可选地,滚筒式的衣物处理设备在脱水过程中的高转速大于或等于每分钟700转。
35.本发明实施例还提供另一种衣物处理设备,其包括滚筒系统、处理器和存储器,存储器上存储有可在处理器上运行的计算机程序,该计算机程序被处理器执行时实现通过衣物处理设备的滚筒系统脱水的方法。
36.可选地,还包括振动传感器,其适于检测滚筒系统在脱水过程中的振幅。
37.本发明实施例还提供另一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序,计算机程序被执行时实现通过衣物处理设备的滚筒系统脱水的方法。
38.与现有技术相比,本发明实施例的技术方案具有有益效果。
39.例如,可以通过检测脱水时滚筒系统的共振振幅来预测高转速脱水时的偏心,由此判断衣物处理设备的运行状况。
40.又例如,可以判断是否可以提高转速以进行高转速脱水,且在不能提高转速以进行高转速脱水时,可以降低转速以重新分布负载,直至可以进行高转速脱水。由此,可以提前进行偏心分布以确保在高转速脱水时可以保护机器和降低噪声。
41.又例如,还可以利用衣物处理设备已有的传感器来采集相关信号,从而无需对设备进行改造,不会增加改造成本。
附图说明
42.图1是本发明实施例中提供的预测衣物处理设备内滚筒系统偏心的方法的流程
图;
43.图2是本发明实施例中提供的相同负载量下滚筒系统的归一化振幅随转速比变化的示意图;其中,横坐标表示内筒的转速与滚筒系统的共振转速之间的转速比,纵坐标表示滚筒系统的归一化振幅,曲线1表示滚筒系统的归一化振幅随转速比的变化曲线,虚线2表示滚筒系统的振幅比k,其为在高转速时归一化振幅趋近于稳定的值;
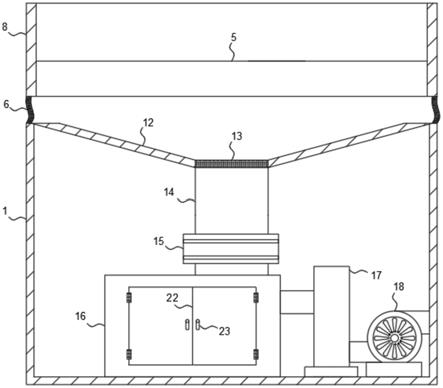
44.图3是本发明实施例中提供的衣物处理设备的结构示意图;
45.图4是本发明实施例中提供的通过衣物处理设备的滚筒系统脱水的方法的流程图。
具体实施方式
46.为使本发明实施例的目的、特征和有益效果能够更为明显易懂,下面结合附图对本发明的具体实施例进行详细说明。
47.实施例1
48.图1是本实施例中提供的预测衣物处理设备内滚筒系统偏心的方法的流程图。
49.如图1所示,本实施例提供的预测衣物处理设备内滚筒系统偏心的方法s10包括:
50.s11.获取实际负载量m1;
51.s12.获取负载量m与振幅比k之间的第一标定关系,其中,振幅比k为相同负载量m下,滚筒系统在高转速运行并趋于稳定时的高转速振幅a与其在共振转速运行时的共振振幅a
max
之间的比值,高转速大于共振转速;
52.s13.根据实际负载量m1和第一标定关系确定与实际负载量m1对应的特定振幅比k1;
53.s14.获取实际负载量m1下的特定共振振幅a
max1
;
54.s15.根据特定振幅比k1和特定共振振幅a
max1
确定实际负载量m1下的特定高转速振幅a1;
55.s16.获取偏心量m与高转速振幅a之间的第二标定关系;
56.s17.根据特定高转速振幅a1和第二标定关系确定实际负载量m1下的特定高转速偏心量m1。
57.在一个或多个具体示例中,本实施例提供的衣物处理设备可以包括滚筒式衣物处理设备。
58.具体而言,衣物处理设备可以包括箱体、滚筒系统和驱动电机。滚筒系统设置于箱体内,其包括设置于箱体内的外筒、可旋转地设置于外筒内的内筒、设置于外筒底部的减振器和连接于外筒和箱体之间的减振弹簧。驱动电机也设置于箱体内、并与内筒连接,其适于驱动内筒旋转。
59.衣物处理设备还可以包括与滚筒系统连接的振幅传感器,其适于检测滚筒系统的振幅。
60.在本实施例提供的技术方案中,衣物处理设备及其组成的具体实施方式可采用本领域常规技术手段实现,此处不再赘述。
61.在步骤s11中,实际负载量m1为衣物处理设备内待脱水负载的实际质量。实际负载量m1可以通过本领域常规技术手段获得。例如,可以通过衣物处理设备内自有的称重模块
来采集获得,也可以通过驱动负载消耗的电能的信号来计算获得,还可以通过驱动不同负载量的负载时电机的电流大小与对应负载量之间的关系来换算获得。
62.在步骤s12中,获取第一标定关系包括:获取不同负载量m下的高转速振幅a和共振振幅a
max
,并将前者与后者的比值确定为不同负载量m对应的振幅比k;将不同负载量m与对应的振幅比k之间的映射关系确定为第一标定关系。
63.在步骤s12中,第一标定关系为负载量m与振幅比k之间的映射关系,对于每一个不同的负载量m,均有唯一的振幅比k与之对应。
64.在步骤s12中,振幅比k为相同负载量m下,滚筒系统在高转速运行并趋于稳定时的高转速振幅a与其在共振转速运行时的共振振幅a
max
之间的比值,且高转速大于共振转速。
65.在通过衣物处理设备对其滚筒系统内的负载进行脱水处理时,内筒以一定的转速旋转,并引起滚筒系统振动。当滚筒系统产生共振时,内筒旋转的转速即为滚筒系统的共振转速。滚筒系统在共振转速下具有最大的振幅,即共振振幅amax。滚筒系统的高转速振幅a为滚筒系统在高转速的脱水过程中产生的振幅。
66.对于处理容量为大于或等于5公斤且小于或等于10公斤的衣物处理设备,在一个或多个具体示例中,其滚筒系统的共振频率位于大于或等于2.5赫兹且小于或等于5赫兹的区间范围内,其滚筒系统的共振转速位于大于或等于150转每分钟且小于或等于300转每分钟的区间范围内,其脱水时采用的高转速大于前述滚筒系统的共振转速,例如,其脱水时采用的高转速可以大于或等于700转每分钟。
67.在一个或多个具体示例中,负载量m与振幅比k之间的映射关系可以通过实验标定获得。具体而言,可以通过标定不同负载量m下的振幅比k获得负载量m与振幅比k之间的映射关系。其中,负载量m可以采用步骤s11中实际负载量m1的获取方法获得,同一负载量m在不同转速下的振幅可以通过振幅传感器采集获得。
68.在本实施例提供的技术方案中,对于特定的衣物处理设备,在相同负载量m下,其振幅比k为一定值。不同的衣物处理设备和/或不同的负载量下,滚筒系统的振幅比k和第一标定关系均需要重新标定。
69.图2是本实施例中提供的相同负载量下的滚筒系统的归一化振幅随转速比变化的示意图。其中,横坐标表示内筒的转速与滚筒系统的共振转速之间的转速比,纵坐标表示滚筒系统的归一化振幅,曲线1表示滚筒系统的归一化振幅随转速的变化曲线,虚线2表示滚筒系统的振幅比k,其为在高转速时归一化振幅趋近于稳定的值。
70.为便于理解和计算,图2中采用了“归一化振幅”,其表示滚筒系统的振幅与其共振振幅的比值。
71.如图2所示,对于特定的衣物处理设备,在相同负载量m下,其滚筒系统的归一化振幅随内筒的转速比呈现先增加后减小的曲线变化关系。
72.当内筒的转速小于滚筒系统的共振转速时,滚筒系统的归一化振幅随内筒转速的增加而增加。
73.在内筒的转速接近滚筒系统的共振转速时,即内筒的转速与滚筒系统的共振转速之间的比值接近1时,滚筒系统的归一化振幅呈现最大值,此时滚筒系统发生共振,且振幅最大。
74.当内筒的转速大于滚筒系统的共振转速时,滚筒系统的归一化振幅随内筒转速的
增加而减小、并在超过一定转速时(即位于高转速区间范围时)趋向于滚筒系统的振幅比k。
75.继续参照图2,对于特定的衣物处理设备,在相同负载量m下,其滚筒系统的振幅比k不随内筒的转速变化、且保持在一定值。例如,在图2所示示例中,该滚筒系统的振幅比k保持在0.5。由此,当内筒的转速大于滚筒系统的共振转速、并超过一定转速时(即位于高转速区间范围时),滚筒系统的高转速振幅a趋向稳定、并保持在其共振振幅a
max
的0.5倍。
76.在步骤s13中,可以根据负载量m与振幅比k之间的一一映射关系确定出与实际负载量m1对应的特定振幅比k1。
77.在步骤s14中,可以通过调节内筒的转速以获取实际负载量m1下的特定共振振幅a
max1
。不同转速下的实际负载量m1下的特定共振振幅a
max1
,可以通过衣物处理设备的振幅传感器获取。具体而言,可以在实际负载量m1下,通过调节内筒的转速使滚筒系统发生共振,并通过振幅传感器获取滚筒系统在发生共振时的振幅,该振幅即为该实际负载量m1下的特定共振振幅a
max1
。
78.通常,负载量会影响滚筒系统的共振转速,负载量不同,滚筒系统的共振转速也不同,共振转速位于一个区间范围内。由此,在具体实施中,可以通过振幅传感器监测滚筒系统在不同转速下振幅变化过程,并在振幅开始下降时确定共振已经产生,共振产生时的转速和振幅即为滚筒系统的共振转速和共振振幅a
max
;或者,也可以在内筒的转速位于共振转速区间范围内时,监测滚筒系统的振幅最大值,该振幅最大值即为滚筒系统的共振振幅a
max
。
79.在步骤s15中,可以根据步骤s13中获得的特定振幅比k1和步骤s14中获得的特定共振振幅a
max1
确定出实际负载量m1下的特定高转速振幅a1,具体而言,a1=k1*a
max1
。
80.在步骤s16中,获取第二标定关系包括:获取不同偏心量m下的高转速振幅a;将不同偏心量m与对应的高转速振幅a之间的映射关系确定为第二标定关系。
81.在步骤s16中,偏心量m为脱水过程中由于负载分布不均匀产生的不平衡质量。
82.负载的偏心可以产生一定的离心力,并导致内筒振动,进而传递到外筒、减振器和减振弹簧。偏心量m越大,根据离心力公式f=mω2r,其产生的离心力越大。在离心力很大的情况下,衣物处理设备、尤其是滚筒系统的机械强度不够,就会造成损伤。
83.在步骤s16中,第二标定关系为偏心量m与高转速振幅a之间的映射关系。在相同负载量m下,对于每一个不同的偏心量m,均有唯一的高转速振幅a与之对应。
84.在一些示例中,偏心量m与高转速振幅a之间的映射关系可以通过实验标定获得。具体而言,可以在内筒中放入不同的质量块,驱动内筒在高转速下旋转,并通过振幅传感器获取不同质量块在高转速下的振幅。其中,内筒中不放置任何负载,不同的质量块的质量即表示不同的偏心量m,不同质量块在高转速下的振幅即为对应偏心量m下的高转速振幅a。
85.在另一些示例中,对于特定的衣物处理设备,在相同负载量m下,其滚筒系统的高转速振幅a与偏心量m之间具有线性关系,即第二标定关系可以通过线性关系表示。例如,第二标定关系可以表示为a=c1*m c0,其中,c1和c0分别为该线性关系对应直线所具有的斜率和截距,偏心量m和高转速振幅a可以通过实验获得。
86.在步骤s17中,可以根据偏心量m与高转速振幅a之间的一一映射关系确定出与特定高转速振幅a1对应的特定高转速偏心量m1。
87.上述预测衣物处理设备内滚筒系统偏心的方法s10的步骤的执行时序仅作为一种
较优的示例,并非是对预测衣物处理设备内滚筒系统偏心的方法的步骤的限定。
88.本实施例提供的第一标定关系和第二标定关系可以在执行预测衣物处理设备内滚筒系统偏心的方法前预先标定。
89.本实施例提供的技术方案可以通过预测衣物处理设备内滚筒系统偏心量来判断衣物处理设备的运行状况。并且,还可基于所判断的运行情况而进行相应操作或者维护。例如,如果所预测的偏心量大于预设值时,则采取维护措施以降低衣物处理设备的偏心量,否则可以正常操作该衣物处理设备。
90.本实施例提供的技术方案可以利用衣物处理设备已有的传感器来采集相关信号,从而无需对设备进行改造,不会增加改造成本。
91.本实施例还提供一种衣物处理设备。
92.在一个或多个具体示例中,衣物处理设备包括滚筒式的衣物处理设备。
93.图3是本实施例中提供的衣物处理设备的结构示意图。
94.如图3所示,衣物处理设备100可以包括箱体110、滚筒系统120和驱动电机130。滚筒系统120设置于箱体110内,其包括设置于箱体110内的外筒121、可旋转地设置于外筒121内的内筒122、设置于外筒121底部的减振器123和连接于外筒121和箱体110之间的减振弹簧124等。驱动电机130也设置于箱体110内、并与内筒122连接,其适于驱动内筒122旋转。
95.在一个或多个具体示例中,减振器123可以设置于外筒121的外底壁和箱体110的内底壁之间。
96.在另一些具体示例中,减震弹簧124可以设置有两组。其中,一组设置于外筒121的左上方,另一组设置于外筒121的右上方。位于外筒121左上方的减震弹簧124包括左上端和右下端,其右下端连接于外筒121的左上端,其左上端连接于箱体110的左内侧壁。位于外筒121右上方的减震弹簧124包括右上端和左下端,其左下端连接于外筒121的右上端,其右上端连接于箱体110的右内侧壁。
97.衣物处理设备100还可以包括与滚筒系统120连接的振幅传感器(图中未示出),其适于检测滚筒系统120的振幅。
98.在一个或多个具体示例中,振幅传感器可以安装在电机130上。
99.本实施例提供的衣物处理设备100还包括处理器和存储器。存储器上存储有可在处理器上运行的计算机程序。该计算机程序被处理器执行时实现本实施例提供的预测衣物处理设备内滚筒系统偏心的方法。
100.本实施例还提供一种计算机可读存储介质。该计算机可读存储介质存储有计算机程序。该计算机程序被执行时实现本实施例提供的预测衣物处理设备内滚筒系统偏心的方法。
101.实施例2
102.图4是本实施例提供的通过衣物处理设备的滚筒系统脱水的方法的流程图。
103.如图4所示,本实施例提供的通过衣物处理设备的滚筒系统脱水的方法s,包括:
104.a.获取实际负载量m1以及负载量m与振幅比k之间的第一标定关系,其中,振幅比k为相同负载量m下滚筒系统在高转速运行时的趋于稳定后的高转速振幅a与在共振转速运行时的共振振幅a
max
之间的比值,高转速大于共振转速;
105.b.根据实际负载量m1和第一标定关系确定与实际负载量m1对应的特定振幅比k1;
106.c.获取实际负载量m1下的特定共振振幅a
max1
;
107.d.根据特定振幅比k1和特定共振振幅a
max1
确定实际负载量m1下的特定高转速振幅a1;
108.e.获取偏心量m与高转速振幅a之间的第二标定关系;
109.f.根据特定高转速振幅a1和第二标定关系确定实际负载量m1下的特定高转速偏心量m1;
110.g.获取偏心量阈值m0;
111.h.判断特定高转速偏心量m1是否小于或等于偏心量阈值m0,若是,则转至i,,若否,则转至j;
112.i.将转速提高至高转速进行脱水;
113.j.降低转速以改变负载分布,并转至c。
114.在一个或多个具体示例中,本实施例提供的衣物处理设备可以包括滚筒式衣物处理设备。
115.具体而言,衣物处理设备可以包括箱体、滚筒系统和驱动电机。滚筒系统设置于箱体内,其包括设置于箱体内的外筒、可旋转地设置于外筒内的内筒、设置于外筒底部的减振器和连接于外筒和箱体之间的减振弹簧。驱动电机也设置于箱体内、并与内筒连接,其适于驱动内筒旋转。
116.衣物处理设备还可以包括与滚筒系统连接的振幅传感器,其适于检测滚筒系统的振幅。
117.在步骤a之前,还可以包括启动驱动电机以驱动内筒旋转的步骤。
118.在步骤a中,实际负载量m1为衣物处理设备内待脱水负载的实际质量。实际负载量m1可以通过本领域常规技术手段获得。例如,可以通过衣物处理设备内自有的称重模块来采集获得,也可以通过驱动负载消耗的电能的信号来计算获得,还可以通过驱动不同负载量的负载时电机的电流大小与对应负载量之间的关系来换算获得。
119.在步骤a中,获取第一标定关系包括:获取不同负载量m下的高转速振幅a和共振振幅a
max
,并将前者与后者的比值确定为不同负载量m对应的振幅比k;将不同负载量m与对应的振幅比k之间的映射关系确定为第一标定关系。
120.在步骤a中,第一标定关系为负载量m与振幅比k之间的映射关系,对于每一个不同的负载量m,均有唯一的振幅比k与之对应。
121.在步骤a中,振幅比k为相同负载量m下,滚筒系统在高转速运行并趋于稳定时的高转速振幅a与其在共振转速运行时的共振振幅a
max
之间的比值,且高转速大于共振转速。
122.在通过衣物处理设备对其滚筒系统内的负载进行脱水处理时,内筒以一定的转速旋转,并引起滚筒系统振动。当滚筒系统产生时,内筒旋转的转速即为滚筒系统的共振转速。滚筒系统在共振转速下具有最大的振幅,即共振振幅a
max
。滚筒系统的高转速振幅a为滚筒系统在高转速的脱水过程中产生的振幅。
123.对于处理容量为大于或等于5公斤且小于或等于10公斤的衣物处理设备,在一个或多个具体示例中,其滚筒系统的共振频率位于大于或等于2.5赫兹且小于或等于5赫兹的区间范围内,其滚筒系统的共振转速位于大于或等于150转每分钟且小于或等于300转每分钟的区间范围内,其脱水时采用的高转速大于前述滚筒系统的共振转速,例如,其脱水时采
用的高转速可以大于或等于700转每分钟。
124.在一个或多个具体示例中,负载量m与振幅比k之间的映射关系可以通过实验标定获得。具体实施方式可参照实施例1内容。
125.在本实施例提供的技术方案中,对于特定的衣物处理设备,在相同负载量m下,其振幅比k为一定值。不同的衣物处理设备和/或不同的负载量下,滚筒系统的振幅比k和第一标定关系均需要重新标定。
126.在步骤b中,可以根据负载量m与振幅比k之间的一一映射关系确定出与实际负载量m1对应的特定振幅比k1。
127.在步骤c中,可以通过调节内筒的转速以获取实际负载量m1下的特定共振振幅a
max1
。不同转速下的实际负载量m1下的特定共振振幅a
max1
,可以通过衣物处理设备的振幅传感器获取。具体而言,可以在实际负载量m1下,通过调节内筒的转速使滚筒系统发生共振,并通过振幅传感器获取滚筒系统在发生共振时的振幅,该振幅即为该实际负载量m1下的特定共振振幅a
max1
。
128.通常,负载量会影响滚筒系统的共振转速,负载量不同,滚筒系统的共振转速也不同,共振转速位于一个区间范围内。由此,在具体实施中,可以通过振幅传感器监测滚筒系统在不同转速下振幅变化过程,并在振幅开始下降时确定共振已经产生,共振产生时的转速和振幅即为滚筒系统的共振转速和共振振幅a
max
;或者,也可以在内筒的转速位于共振转速区间范围内时,监测滚筒系统的振幅最大值,该振幅最大值即为滚筒系统的共振振幅a
max
。
129.在步骤d中,可以根据步骤b中获得的特定振幅比k1和步骤c中获得的特定共振振幅a
max1
确定出实际负载量m1下的特定高转速振幅a1,具体而言,a1=k1*a
max1
。
130.在步骤e中,获取第二标定关系包括:获取不同偏心量m下的高转速振幅a;将不同偏心量m与对应的高转速振幅a之间的映射关系确定为第二标定关系。
131.在步骤e中,偏心量m为脱水过程中由于负载分布不均匀产生的不平衡质量。
132.负载的偏心可以产生一定的离心力,并导致内筒振动,进而传递到外筒、减振器和减振弹簧。偏心量m越大,根据离心力公式f=mω2r,其产生的离心力越大。在离心力很大的情况下,衣物处理设备、尤其是滚筒系统的机械强度不够,就会造成损伤。
133.在步骤e中,第二标定关系为偏心量m与高转速振幅a之间的映射关系。在相同负载量m下,对于每一个不同的偏心量m,均有唯一的高转速振幅a与之对应。
134.在一些示例中,偏心量m与高转速振幅a之间的映射关系可以通过实验标定获得。具体实施方式可参照实施例1内容。
135.在另一些示例中,在本实施例提供的技术方案中,对于特定的衣物处理设备,在相同负载量m下,其滚筒系统的高转速振幅a与偏心量m之间具有线性关系,即第二标定关系可以通过线性关系表示。例如,第二标定关系可以表示为a=c1*m c0,其中,c1和c0分别为该线性关系对应直线所具有的斜率和截距,偏心量m和高转速振幅a可以通过实验获得。
136.在步骤f中,可以根据偏心量m与高转速振幅a之间的一一映射关系确定出与特定高转速振幅a1对应的特定高转速偏心量m1。
137.步骤g中偏心量阈值m0可以根据特定衣物处理设备的具体情况预先设置。通常,预设的偏心量阈值m0适于确保滚筒系统不会产生较大振动,以避免对衣物处理设备造成损坏
和引起较大噪音。
138.在步骤h中,判断特定高转速偏心量m1是否小于或等于偏心量阈值m0,若是,则转至i,若否,则转至j;
139.在步骤i中,由于,特定高转速偏心量m1小于或等于偏心量阈值m0,因此,可以将内筒的转速提高至高转速进行脱水,且不会引起滚筒系统的较大振动。
140.在步骤j中,由于,特定高转速偏心量m1大于偏心量阈值m0,因此,需要降低内筒的转速以改变负载分布,并转至c,直至实际负载量m1下的特定高转速振幅a1对应的特定高转速偏心量m1低于或等于偏心量阈值m0,可以将内筒的转速提高至高转速进行脱水为止。
141.在步骤j中,降低转速以改变负载分布可以包括降低转速以将负载抖散、然后上升转速以使负载重新贴筒。
142.上述通过衣物处理设备的滚筒系统脱水的方法s的步骤的执行时序仅作为一种较优的示例,并非是对通过衣物处理设备的滚筒系统脱水的方法的步骤的限定。
143.本实施例提供的第一标定关系和第二标定关系可以在执行通过衣物处理设备的滚筒系统脱水的方法前预先标定。
144.本实施例提供的技术方案可以在低转速脱水时预测高转速脱水时的特定高转速偏心量m1,并以此判断是否可以提高转速以进行高转速脱水,且在不能提高转速以进行高转速脱水时,还可以降低转速以重新分布负载,直至可以进行高转速脱水。由此,可以提前进行偏心分布以确保在高转速脱水时可以保护机器和降低噪声。
145.本实施例提供的技术方案可以利用衣物处理设备已有的传感器来采集相关信号,从而无需对设备进行改造,不会增加改造成本。
146.本实施例还提供另一种衣物处理设备。
147.在一个或多个具体示例中,该衣物处理设备包括滚筒式的衣物处理设备。
148.具体而言,该衣物处理设备可以包括箱体、滚筒系统和驱动电机。滚筒系统设置于箱体内,其包括设置于箱体内的外筒、可旋转地设置于外筒内的内筒、设置于外筒底部的减振器和连接于外筒和箱体之间的减振弹簧。驱动电机也设置于箱体内、并与内筒连接,其适于驱动内筒旋转。
149.在一个或多个具体示例中,减振器可以设置于外筒的外底壁和箱体的内底壁之间。
150.在另一些具体示例中,减震弹簧可以设置有两组。其中,一组设置于外筒的左上方,另一组设置于外筒的右上方。位于外筒左上方的减震弹簧包括左上端和右下端,其右下端连接于外筒的左上端,其左上端连接于箱体的左内侧壁。位于外筒右上方的减震弹簧包括右上端和左下端,其左下端连接于外筒的右上端,其右上端连接于箱体的右内侧壁。
151.衣物处理设备还可以包括与滚筒系统连接的振幅传感器,其适于检测滚筒系统的振幅。
152.在一个或多个具体示例中,振幅传感器可以安装在电机上。
153.本实施例提供的衣物处理设备还包括处理器和存储器。存储器上存储有可在处理器上运行的计算机程序。该计算机程序被处理器执行时实现本实施例提供的通过衣物处理设备的滚筒系统脱水的方法。
154.本实施例还提供一种计算机可读存储介质。该计算机可读存储介质存储有计算机
程序。该计算机程序被执行时实现本实施例提供的通过衣物处理设备的滚筒系统脱水的方法。
155.尽管上文已经描述了具体实施方案,但这些实施方案并非要限制本发明公开的范围,即使仅相对于特定特征描述单个实施方案的情况下也是如此。本发明公开中提供的特征示例意在进行例示,而非限制,除非做出不同表述。在具体实施中,可根据实际需求,在技术上可行的情况下,将一项或者多项从属权利要求的技术特征与独立权利要求的技术特征进行组合,并可通过任何适当的方式而不是仅通过权利要求书中所列举的特定组合来组合来自相应独立权利要求的技术特征。
156.虽然本发明披露如上,但本发明并非限定于此。任何本领域技术人员,在不脱离本发明的精神和范围内,均可作各种更动与修改,因此本发明的保护范围应当以权利要求所限定的范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。