技术特征:
1.一种自动行驶系统,其特征在于,具备:存储部,该存储部对第一基准线及第二基准线进行存储;行驶路径生成部,该行驶路径生成部生成与所述第一基准线或所述第二基准线平行的平行路径;以及自动行驶控制部,该自动行驶控制部使作业车辆沿着由该行驶路径生成部生成的所述平行路径自动行驶。2.根据权利要求1所述的自动行驶系统,其特征在于,所述行驶路径生成部基于所述作业车辆的位置信息而选择所述第一基准线及所述第二基准线中的任一基准线,生成从所述作业车辆的当前位置通过并与所选择的基准线平行的所述平行路径。3.根据权利要求1所述的自动行驶系统,其特征在于,在所述行驶路径生成部中,作为所述平行路径,能够空开规定间隔地生成与所述第一基准线平行的多个第一平行路径,并且,能够生成从所述作业车辆的当前位置通过并与所述第二基准线平行的第二平行路径。4.根据权利要求1~3中任一项所述的自动行驶系统,其特征在于,所述自动行驶控制部能够使所述作业车辆在多个所述平行路径上自动行驶,并且当从所述平行路径向下一个所述平行路径移动时,容许所述作业车辆的手动行驶,所述自动行驶系统具备通知控制部,在使所述作业车辆从所述平行路径向下一个所述平行路径手动行驶的情况下,该通知控制部进行如下通知,该通知是对手动行驶结束后的所述作业车辆的位置与下一个所述平行路径中的自动行驶的开始位置之间的偏差进行提示。
技术总结
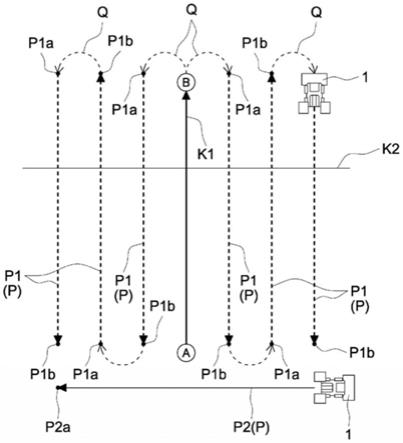
本发明提供一种自动行驶系统,具备:存储部,其对第一基准线(K1)及第二基准线(K2)进行存储;行驶路径生成部,其生成与第一基准线(K1)或第二基准线(K2)平行的平行路径(P1、P2);以及自动行驶控制部,其使作业车辆(1)沿着由该行驶路径生成部生成的平行路径(P1、P2)自动行驶。自动行驶。自动行驶。
技术研发人员:绢田圭志
受保护的技术使用者:洋马动力科技有限公司
技术研发日:2020.03.12
技术公布日:2021/10/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。