1.本发明涉及一种用于向农作物施用有效成分的无人驾驶飞行器,以及一种通过无人驾驶飞行器向农作物施用有效成分的方法。
背景技术:
2.本发明的一般背景是将液体形式的有效成分通过使用例如喷杆喷雾器的车辆施用在植物上。在农业环境中需要施用除草剂、农药、杀虫剂和营养补充剂等有效成分。控制作物中的杂草、昆虫和疾病是减少农业损失的重要要求。这通常是通过拖拉机、背负式喷雾器和无人驾驶飞行器(uav)(例如无人机和无线电控制直升机)喷洒作物叶面来实现的。所有这些施用技术的缺点是通常整块田地都被喷洒。此外,可能会发生喷洒飘失,导致在预期的目标喷洒区域之外的不期望的目标偏离损耗。需要以新的方式促进施用,并降低这种施用的成本。公众也越来越希望看到任何与这种施用相关联的环境影响得到减少。
技术实现要素:
3.具有用于在农业环境中施用有效成分的改进的方法将会是有利的。
4.本发明的目的通过独立权利要求的主题来解决,其中,进一步的实施例结合至从属权利要求中。应当注意的是,在本发明中,以下描述的方面和示例同样适用于将有效成分施用于农作物的无人驾驶飞行器,以及通过无人驾驶飞行器将有效成分施用于农作物的方法。
5.根据第一方面,本发明提供了一种用于向农作物施用有效成分的无人驾驶飞行器,该无人驾驶飞行器包括:
6.‑
至少一个贮液器;
7.‑
至少一个液体施用单元;
8.‑
处理单元;
9.‑
至少一组旋翼桨叶;和
10.‑
多条支腿。
11.贮液器被构造成容纳包含有效成分的液体。至少一个液体施用单元与至少一个贮液器流体连通。至少一个液体施用单元被构造为从处理单元处接收至少一个输入,其中至少一个输入可用于激活至少一个液体施用单元。无人驾驶飞行器被配置成能够使用至少一组旋翼桨叶在环境中飞行。无人驾驶飞行器被配置成能够在环境中着陆。无人驾驶飞行器被配置成能够利用多条支腿行走到一位置以将液体施用到至少一株植物,并且其中该位置是基于对环境的至少一个图像的一个或多个图像所进行的图像分析来确定的。
12.换句话说,无人驾驶飞行器(uav),例如无人机,可以着陆和行走,并将液体中所包含的有效成分施用到植物上。以这种方式,无人驾驶飞行器可以停止或顺桨(feather)用于提升的旋翼桨叶的旋转,这减轻了由旋翼桨叶的向下气流所引起的植物的运动。植物的这种运动会导致难以准确并有效地施用有效成分,因此用于施用有效液体的着陆的无人驾驶
飞行器能够准确并有效地将有效成分施用到植物上。
13.无人驾驶飞行器或无人机也可以在例如天气恶劣时着陆,并在作物周围行走,以在需要的地方喷洒。因此,在通常禁止使用无人驾驶飞行器进行喷洒的情况下能够继续对作物进行喷洒。
14.此外,通过着陆和行走并将含有有效成分的液体施用到植物上,可以减轻旋翼桨叶的向下气流导致以喷雾形式施用的液体飘失的影响。
15.此外,通过着陆并行走至某个位置,无人驾驶飞行器可以在施用液体时保持静止,由于是从非运动平台施用液体,因此液体可以被更加精确地施用到植物上。
16.因此,环境的图像可以由无人机获取,或者实际上由先前可能已获取图像的不同平台获取。图像被传输至处理单元,该处理单元也可以在无人机内,或者在无人机的外部。该处理单元分析图像以确定无人驾驶飞行器应该行走的位置,从而激活由无人驾驶飞行器所携带的液体施用单元。以这种方式,在计算机(例如在农民办公室中)中对所获取的田地图像的离线处理可用于确定实际上应当由无人驾驶飞行器(例如无人机)在该田地中施用液体中的特定有效成分的位置地图。
17.以这种方式,在一个示例中,无人机可以具有处理单元,并且被提供由不同平台获取的图像。随后无人机分析图像,以确定要行走的位置,并激活其液体施用单元。它可以在着陆之前或之后执行此操作。因此,无人机可以飞行并确定激活其液体施用单元的位置,飞到合适的地点并着陆,然后行走到该位置并在该位置处施用液体。或者,无人机可以在某个地点着陆,分析与该地点附近区域相关的图像,并确定为施用液体的而要行走到的位置。
18.以这种方式,在一个示例中,无人机可以具有相机并获取图像,该图像被传递至位于无人机外部的处理单元,例如田地旁边的农民的笔记本电脑中的处理单元。处理单元使用图像处理来分析图像,以确定无人机为了激活液体施用单元而应该行走到的位置,无人机可以在着陆之前或之后执行此操作。因此,无人机可以飞行并在飞行时获取图像,并且该图像被传递至处理单元,该处理单元确定着陆后为了激活无人机的液体施用单元而要行走到的位置,该位置被传递回到无人机。而后无人机飞到一个合适的地点,在该地点处着陆,然后走到所述位置,在该位置处施用液体。或者,无人机可以在某个地点着陆,并获取附近的图像。该图像被来回传递到外部处理单元,该外部处理单元分析与该地点附近区域相关的图像,以确定为了施用液体而要行走到的位置。而后无人机在该位置处施用液体。
19.以这种方式,在一个示例中,无人机可以具有相机并获取图像,并且具有处理单元,该处理单元使用图像处理来分析图像,以确定为了激活液体施用单元而要行走到的位置。无人机可以在着陆之前或之后执行此操作。因此,无人机可以飞行并在飞行时获取图像,并且该图像由无人机的处理单元进行分析,以确定着陆后为了激活其液体施用单元而要行走到的位置。而后无人机飞到一个合适的地点,在该地点处着陆,然后走到所述位置,在该位置处施用液体。或者,无人机可以在一个地点着陆,并获取附近的图像。该图像由处理单元分析,以确定施用液体的位置。而后无人机着陆、行走并在该位置处施用液体。
20.以这种方式,需要的有效成分较少,因为目标杂草、昆虫和疾病可以被直接处理而不是在整个作物上处理。此外,由于液体可以更有效地施用于植物,使得无人机能够用更少的液体处理更大的区域。此外,恶劣天气的影响可以得到减轻,因为无人机可以通过着陆继续喷洒。因此,无人机可以飞行并喷洒,并在需要时可以着陆并继续喷洒。总体来说,本发明
提供了更有效的喷洒技术。
21.换句话说,无人驾驶飞行器携带的液体可以更有效地在环境中施用,例如用于杂草和/或害虫控制,而不是不加区别地施用。液体可以仅在需要的位置施用,并且基于对所获取的图像的分析,在这些位置高效且有效地施用。因此,由于液体可以被配制成用于小体积的施用,并且由于只有那些需要处理的环境区域得到处理,无人驾驶飞行器可以处理更大的环境。以这种方式,由于使用较少的液体及有效成分,节省了成本,并且由于处理更小的环境区域并且更加有效地处理这些区域,节省了时间,并且存在相关的环境效益。
22.在一个示例中,处理单元被配置成对于至少一个图像的一个或多个图像进行分析,以确定一位置以将液体施用到至少一株植物。
23.在一个示例中,为了确定液体施用的至少一个位置而对至少一个图像所进行的分析包括确定至少一种类型的杂草,和/或包括确定至少一种类型的疾病,和/或包括确定至少一种类型的害虫,和/或包括确定至少一种类型的昆虫,和/或包括确定至少一种类型的营养缺乏。
24.换句话说,液体施用单元可以被激活,并且液体施用的方式考虑在某个位置处存在待控制的杂草,并且在其中可以考虑待控制的杂草的类型,和/或考虑在某个位置处存在待控制的疾病,并且在其中可以考虑待控制的疾病的类型,和/或考虑在某个位置处存在待控制的害虫,并且在其中可以考虑待控制的害虫的类型,和/或考虑在某个位置处存在待控制的昆虫,并且在其中可以考虑待控制的昆虫的类型,和/或考虑在某个位置处存在待缓解的营养缺乏,并且其中可以考虑待缓解的营养缺乏的类型。
25.因此,无人驾驶飞行器(例如无人机)可以在例如田地的环境中飞行,并且基于对所获得的田地图像进行的图像处理,确定是否有杂草、杂草的类型及其所在位置,并且可以在杂草的位置处施用含有控制该杂草和/或该类型的杂草所需的有效成分的液体。无人机可以具有很多不同的容器,这些容器包含具有不同有效成分的不同液体,并且根据识别出的杂草,可以将适当的液体施用在杂草上。此外,还可以有很多不同的无人机围绕田地飞行,每个无人机在其贮液器内都有含有不同有效成分的不同液体,并且不同的无人机可以在需要的位置施用它们所携带的液体。
26.例如,在一个特定的示例中,当无人机具有相机时,如果该无人机拍摄到一种杂草,该杂草需要被施用该无人机所携带的液体,则该无人机能够立即将该液体施用至该杂草。然而,如果确定该杂草应该由不同的液体来控制,则这一信息和杂草的位置以及待施用于该位置的液体类型可以被传送至不同的无人机,其中该信息可以从第一无人机或者经由位于第一无人机外部的处理单元而被传送至携带有正确液体的第二无人机。而后,第二无人机飞至杂草,并在杂草上施用正确的液体。无人驾驶飞行器以相同的方式在控制疾病、害虫、昆虫和缓解营养缺乏方面运作。
27.以这种方式,在每个位置处使用正确的化学品,从而提高了施用的有效性,并且还具有相关的环境优势,因为仅在必要的位置使用最具攻击性的化学品。
28.在一个示例中,基于对环境中至少一个图像的一个或多个图像的图像分析来确定无人驾驶飞行器的着陆位置。
29.因此,无人驾驶飞行器可以飞行并且被提供着陆地点,或者自行确定着陆地点。可以在已经确定液体的施用位置之后确定着陆地点。因此,例如,可以识别田地中的杂草并确
定其位置。然后确定无人机着陆的合适地点,而后无人机行走到该位置。之后无人机根据需要施用液体。或者,可以在确定施用液体的位置之前确定着陆地点。因此,可以为无人机提供一个区域内一个或多个着陆地点,或者无人机可以自行确定着陆地点。无人机在这些地点着陆,或者无人机自行在该位置处获取图像(该图像经过处理以确定附近的位置)并行走至该位置以施用液体,或者无人机行走至该位置并基于由不同平台获取的图像而在这些位置处施用液体。
30.在一个示例中,为确定着陆位置而分析的一个或多个图像与为确定一位置以将液体施用到至少一株植物而分析的一个或多个图像相同。
31.在一个示例中,为确定着陆位置而分析的一个或多个图像不同于为确定一位置以将液体施用到至少一株植物而分析的一个或多个图像。
32.在一个示例中,多条支腿中每一个的远离连接至无人驾驶飞行器的机身之端部的端部包括至少一个稳定结构。
33.以这种方式,无人机等无人驾驶飞行器可以安全着陆,然后在不同的地面区域行走,例如干燥坚硬的地面,或者软或沼泽的地面,甚至在稻田里。
34.在一个示例中,至少一个液体施用单元能够相对于无人驾驶飞行器的机身运动。无人驾驶飞行器的处理单元被配置成使得至少一个液体施用单元运动。
35.以这种方式,无人驾驶飞行器可以在需要时以非常有针对性的方式向单株植物施用液体。这是因为无人驾驶飞行器不必像固定的液体施用单元所要求的那样着陆并行走至相对于植物的精确位置,而是可以着陆并行走至适当的位置,然后根据需要使液体施用单元运动。
36.在一个示例中,至少一个液体施用单元被安装在至少一个可延伸臂上。
37.这提供了更好的喷洒及更好的喷洒控制。
38.在一个示例中,当无人驾驶飞行器已经着陆并行走至一位置以将液体施用到至少一株植物时,处理器被配置为基于对环境中至少一个图像的一个或多个图像的图像分析,使至少一个液体施用单元运动到特定位置,从而激活至少一个液体施用单元。
39.以这种方式,图像处理不仅仅用于确定无人驾驶飞行器应该在环境中的什么位置行走以将液体施用到环境中,而且还用于确定在该位置中具体要喷洒的位置,例如喷洒在特定的植物上或植物的特定部分上。此外,图像处理可以用来确定无人驾驶飞行器应该在什么地点着陆,而后行走到某个位置,然后在该位置处以受控制的方式喷洒。因此,本发明提供了不需要任何人工输入或控制的全自动系统。
40.在一个示例中,无人驾驶飞行器包括连接到无人驾驶飞行器的机身的相机,其中相机被配置成获取至少一个图像。
41.在一个示例中,相机被配置为相对于无人驾驶飞行器的机身运动。无人驾驶飞行器的处理单元被配置成使相机运动。
42.以这种方式,当无人驾驶飞行器四处飞行时,相机可以运动,以便对环境的不同部分成像,而不需要改变无人驾驶飞行器的方向,而如果相机处于固定位置,则需要改变无人驾驶飞行器的方向。此外,无人驾驶飞行器能够在合适的地点着陆,然后对其所在地点的植物进行成像,以确定液体施用的位置。
43.在一个示例中,无人驾驶飞行器被配置成在无人驾驶飞行器已经在环境中着陆之
后确定液体施用的位置。
44.在一个示例中,无人驾驶飞行器被配置成在无人驾驶飞行器已经在环境中着陆之前确定液体施用的位置。
45.因此,无人驾驶飞行器可以围绕田地飞行,并确定需要喷洒的地方,然后确定着陆地点,之后着陆,行走至喷洒地位置。但是,在另一些情况下,可能很少有合适的着陆地点,无人驾驶飞行器通过图像处理来确定这些地点,然后着陆。随后无人驾驶飞行器可以关闭其旋翼,并使用相机确定该地区是否需要喷洒。例如,无人驾驶飞行器可以将其相机向上延伸,并扫描周围区域。如果根据图像分析,某个区域看起来需要喷洒,无人驾驶飞行器可以行走到该位置喷洒植物,并且如果有必要,再次使用图像处理来仔细观察植物,以便更加有效地喷洒液体。
46.在一个示例中,无人驾驶飞行器包括位置确定装置。
47.在一个示例中,基于风速、风向、降水状态中的一个或多个,来确定着陆并行走到施用液体的位置。
48.在一个示例中,无人驾驶飞行器被构造成从外部系统中接收与风速、风向、降水状态中的一个或多个相关的信息。
49.在一个示例中,无人驾驶飞行器包括风速传感器、风向传感器、降水传感器中的一个或多个。
50.因此,无人驾驶飞行器可以通过着陆、行走到所需地点并将液体喷洒到植物上来减轻由风力太强和/或方向错误所引起的喷雾飘失。此外,在下雨时,无人驾驶飞行器可以通过着陆并通过行走到这些地点进行喷洒,从而减轻雨水造成的冲刷损耗。当风停了和/或雨停了时,无人驾驶飞行器可以起飞并根据需要继续从空中喷洒作物。
51.在一个示例中,无人驾驶飞行器被配置成当无人驾驶飞行器已经在环境中着陆时,停止或顺桨至少一组旋翼桨叶。
52.以这种方式,节省了功率,并且这减轻了旋翼因撞击作物而受损和/或作物因旋翼而受损。
53.在一个示例中,至少一个保护笼或保护网围绕至少一组旋翼桨叶。
54.这减轻了旋翼因撞击作物而损坏和/或作物因旋翼而损坏。
55.在一个示例中,无人驾驶飞行器被配置成在无人驾驶飞行器飞行时,飞行至一位置以将液体施用到至少一株植物,并且其中该位置是基于对环境中至少一个图像的一个或多个图像的图像分析来确定的。
56.在一个示例中,处理单元被配置成执行对至少一个图像的分析,以确定无人驾驶飞行器在飞行时将液体施用至到至少一株植物的位置。
57.因此,无人驾驶飞行器或无人机可以自主决定在哪里着陆,以及决定行走到哪里,并准确地决定在最终位置处向哪里喷洒。因此,为无人机提供了一个完全自动化的解决方案,该无人机可以围绕田地飞行并喷洒目标植物。如果有必要,例如由于恶劣天气,无人机可以通过继续确定需要被喷洒的作物从而继续喷洒,但是现在要确定在哪里着陆以及如何行走至该位置以喷洒植物。因此,可以在考虑到天气状况(这种天气状况会阻止其他无人机喷洒作物,例如由于喷洒飘失问题或流出)的情况下进行作物喷洒。
58.在一个示例中,处理单元被配置成利用算法来确定无人驾驶飞行器在地面上时为
将液体施用到至少一株植物上而应该行走到的环境中的位置,以及无人驾驶飞行器在空中时为将液体施用到至少一株植物上而应该飞行到的环境中的位置。这种确定包括对于至少一个图像的分析。
59.在一个示例中,确定无人驾驶飞行器为了施用液体而应该行走到的位置和确定无人驾驶飞行器为了施用液体而应该飞行到的位置,包括利用被配置为给无人驾驶飞行器供电的电池的确定的功率水平和/或包括利用环境所需的确定的操作持续时间。
60.以这种方式,可以设计或确定有效的喷洒计划,该喷洒计划决定在哪里着陆、行走和喷洒,以及在哪里飞行和喷洒。通过这种方式,可以最大化电池寿命和/或最快速且有效地喷洒该区域,这可以考虑到变化的天气状况。
61.在一个示例中,至少一个液体施用单元中的每一个位于至少一组旋翼桨叶中的一个或多个的下方。
62.在一个示例中,至少一个液体施用单元中的每一个位于至少一组旋翼桨叶中的不同组旋翼桨叶的下方。
63.以这种方式,喷洒的液体可以被夹带在旋翼的下洗流中。因此,当飞行和喷洒时,下洗流可由用于产生无人机升力的装置提供。并且,当在地面上行走时,旋翼可以以产生夹带下洗流,但不会导致起飞的速度运行。无人机可以在旋翼桨叶周围设置保护网或保护笼,以防止旋翼受损和/或农作物受损。
64.在一个示例中,至少一个液体施用单元包括至少一个喷嘴施用器或至少一个旋转圆盘施用器。
65.根据第二方面,本发明提供了一种通过无人驾驶飞行器将有效成分施用于农作物的方法,其中无人驾驶飞行器包括至少一个贮液器、至少一个液体施用单元、至少一组旋翼桨叶和多条支腿;并且其中该方法包括:
66.a)将包含有效成分的液体储存在贮液器中,该贮液器封装于无人驾驶飞行器的机身内或附接至无人驾驶飞行器,其中至少一个液体施用单元连接到无人驾驶飞行器的机身,并且至少一个液体施用单元与贮液器流体连通;
67.b)由至少一个液体施用单元接收来自处理单元的至少一个输入,其中至少一个输入可用于激活至少一个液体施用单元;
68.c)使用至少一组旋翼桨叶使得无人驾驶飞行器在环境中飞行;
69.d)使无人驾驶飞行器在环境中着陆,以将液体施用到至少一株植物;和
70.e)利用多条支腿行走至一位置以将液体施用到至少一株植物,其中该位置是基于对环境中至少一个图像的一个或多个图像的图像分析来确定的。
71.有利的是,任何上述方面所提供的益处同样适用于所有其他方面,反之,所有其他方面同样适用任何上述方面所提供的益处。
72.参考下文中描述的实施例,上述方面和示例将变得显而易见并得以阐明。
附图说明
73.下面将参考以下附图对示例性实施例进行描述:
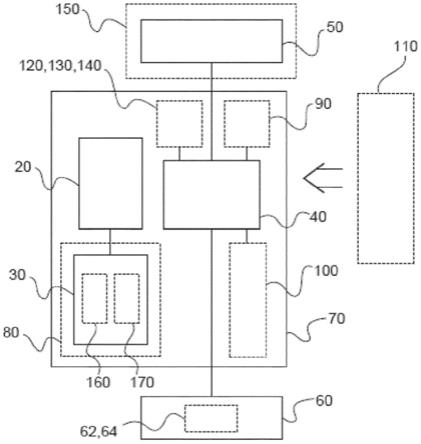
74.图1示出了用于将有效成分施用于农作物的无人驾驶飞行器的示例的示意性设置;
75.图2示出了通过无人驾驶飞行器将有效成分施用于农作物的方法;以及
76.图3a
‑
3f示出了运行中的无人驾驶飞行器的详细示例。
具体实施方式
77.图1示出了用于将有效成分施用于农作物的无人驾驶飞行器(uav)10的示例。实线所示的特征部是基本特征部,而虚线所示的特征部是可选的。无人驾驶飞行器包括至少一个贮液器20、至少一个液体施用单元30、处理单元40、至少一组旋翼桨叶50和多条支腿60。多条支腿可以是三条腿,四条腿,甚至超过四条腿。贮液器被构造为容纳包含有效成分的液体。至少一个液体施用单元与至少一个贮液器流体连通。至少一个液体施用单元被配置为从处理单元接收至少一个输入。至少一个输入可用于激活至少一个液体施用单元。无人驾驶飞行器被构造成使用至少一组旋翼桨叶在环境中飞行。无人驾驶飞行器被构造为在环境中着陆。无人驾驶飞行器被配置成在多条支腿上行走至将液体施用到至少一株植物的位置。施用液体的位置是基于对环境的至少一个图像的一个或多个图像的图像分析来确定的。
78.在一个示例中,液体施用单元包括被配置成喷洒液体的喷枪或喷嘴或旋转盘,喷洒液体可以包括雾化该液体以作为喷洒过程的一部分。
79.在一个示例中,液体施用单元包括被配置为在施用液体期间接触植物的施用装置。这种施用装置的一个示例是画笔型装置,该装置将液体分配到刷子上,刷子以刷涂的方式施用到植物上。
80.在一个示例中,无人驾驶飞行器包括可移动的植物保持装置,并且当无人驾驶飞行器已在环境内着陆时,处理器被配置为基于对环境的至少一个图像的图像分析来使植物保持装置运动从而保持至少一株植物。因此,在施用期间,被施用液体的植物可以保持稳定。在一个示例中,可移动的植物保持装置包括可移动的臂。在一个示例中,可移动的臂是可延伸的。
81.在一个示例中,无人驾驶飞行器用于铁路沿线和周围地区的杂草控制。
82.根据一个示例,处理单元被配置为执行对至少一个图像的一个或多个图像的分析,以确定用于将液体施用到至少一株植物的位置。
83.在一个示例中,分析至少一个图像以确定用于激活液体施用单元的至少一个位置包括确定至少一种杂草,和/或包括确定至少一种疾病,和/或包括确定至少一种害虫,和/或包括确定至少一种昆虫,和/或包括确定至少一种营养缺乏。
84.根据一个示例,分析至少一个图像以确定用于施用液体的至少一个位置包括确定至少一种类型的杂草,和/或包括确定至少一种类型的疾病。
85.根据一个示例,分析至少一个图像以确定用于施用液体的至少一个位置包括确定至少一种类型的害虫,和/或包括确定至少一种类型的昆虫。
86.根据一个示例,分析至少一个图像以确定用于施用液体的至少一个位置包括确定至少一种类型的营养缺乏。
87.在一个示例中,对至少一个图像的分析包括利用机器学习算法。
88.在一个示例中,机器学习算法包括决策树算法。
89.在一个示例中,机器学习算法包括人工神经网络。
90.在一个示例中,机器学习算法已经基于多个图像被教导。在一个示例中,机器学习算法是基于包含至少一种杂草,和/或至少一种患有一种或多种疾病的植物,和/或至少一种遭受一种或多种昆虫的虫害的植物,和/或至少一种昆虫(当图像具有足够的分辨率时),和/或至少一种遭受一种或多种害虫的植物,和/或至少一种遭受一种或多种营养缺乏的植物的图像的多个图像来教导的。在一个示例中,机器学习算法已经基于包含这种图像的多个图像被教导。
91.因此,无人驾驶飞行器(也称为无人机)可以具有一个相机和一个处理单元,该处理单元使用由相机获取的图像来激活液体施用单元。相机获取田地环境的图像。图像不需要该无人机获取,而是可以由不同的无人机获取,然后传递给该无人机进行处理。相机所获取的图像具有能够将植物识别为植物的分辨率,并且实际上具有能够将一种类型的杂草与另一种类型的杂草区分开来的分辨率。图像具有能够根据作物本身的图像或者从例如昆虫本身所得到的获取物来确定被害虫或昆虫感染的作物的分辨率。无人机可以具有全球定位系统(gps),从而能够确定所获取的图像的位置。例如,获取图像时相机的方向及无人机的位置可用于确定图像在地面上的地理足迹。无人机也可以具有例如基于激光陀螺仪的惯性导航系统。除了用于确定无人机的方位并由此确定相机的方位,从而便于确定图像在地面上的获取位置之外,惯性导航系统还可以在不具有全球定位系统的情况下单独工作,以通过确定远离一个或多个已知位置(例如加注/充电站)的运动来确定无人机的位置。相机将获取的图像传递给处理单元。图像分析软件在处理单元上运行。图像分析软件可以使用特征提取,例如边缘检测和对象检测分析,例如可以识别诸如建筑物、道路、栅栏、树篱等位于田地内部及周围的结构。因此,基于这些对象的已知位置,处理单元可以修补所获取的图像,以有效地创建该环境的合成表示,该合成表示可以有效地重叠在该环境的地理地图上。因此,可以确定每个图像的地理位置,并且不需要与所获取的图像相关联的基于相关全球定位系统和/或惯性导航的信息。换句话说,基于图像的定位系统可以用来定位无人机。然而,如果具有可用的全球定位系统和/或惯性导航信息,则不需要这种可以仅基于图像而将特定图像放置在特定地理位置的图像分析。但是,如果基于全球定位系统和/或惯性导航的信息是可用的,则这种图像分析可用于增强与图像相关联的地理位置。
92.进一步地,处理单元运行图像处理软件。该软件分析图像以确定图像中可以找到植物的区域,并且分析图像以确定无法找到植物的区域(例如,穿过田地的路、田地边界周边,甚至穿过田地的拖拉机车轮轨迹)。后一种信息可用于确定不需要施用液体的位置。
93.可以基于位于所获取的图像内的特征的形状来检测植物,其中,例如,边缘检测软件被用于勾画对象的外周以及位于对象本身的外周内部的特征的外周;当无人机用于铁路轨道环境沿线的杂草控制时,可以以类似的方式检测道砟之间的有机物质。植物图像数据库可用于帮助确定图像中的特征是否与植物相关,例如使用经过训练的机器学习算法,如人工神经网络或决策树分析。相机可以获取多光谱图像,其中图像具有与图像中的颜色相关的信息,并且该信息可以单独使用,或者与特征检测结合使用,以确定在图像中可以找到植物的位置。如上所述,由于可以确定图像的地理位置,因此根据对图像在地面上的大小的了解,可以在图像中找到植物的一个和多个位置和/或要施用液体的其他区域,然后可以将其映射到地面上该植物(区域)的确切位置。
94.处理单元可以访问包含不同杂草类型以及用于在杂草上施用的最佳液体的数据
库。这个数据库是根据由实验确定的数据汇编的。使用机器学习算法的图像处理软件还被教导以识别昆虫,被昆虫感染的植物,遭受害虫的植物和遭受营养缺乏的植物。这是以与上述相同的方式,通过基于先前获取的图像的训练完成的。数据库还包含在什么情况下应该使用什么液体的信息。
95.根据一个示例,基于对环境中至少一个图像的一个或多个图像的图像分析来确定无人驾驶飞行器的着陆位置。
96.根据一个示例,为确定着陆位置而分析的一个或多个图像与为确定将液体施用到至少一株植物的位置而分析的一个或多个图像相同。
97.根据一个示例,为确定着陆位置而分析的一个或多个图像不同于为确定将液体施用到至少一株植物的位置而分析的一个或多个图像。
98.根据一个示例,多条支腿中每一个的端部62远离连接至无人驾驶飞行器的机身70的端部,端部62包括至少一个稳定结构64。
99.在一个示例中,所述至少一个稳定性结构包括钉、圆盘、球、圆锥体中的一个或多个。
100.根据一个示例,至少一个液体施用单元可相对于无人驾驶飞行器的机身运动。无人驾驶飞行器的处理单元被配置成使至少一个液体施用单元运动。
101.根据一个示例,至少一个液体施用单元安装在至少一个可延伸臂80上。
102.根据一个示例,当无人驾驶飞行器已经着陆并行走到用于将液体施用到至少一株植物的位置时,处理器被配置为基于对环境的至少一个图像的一个或多个图像的图像分析,使至少一个液体施用单元运动至用于激活至少一个液体施用单元的特定位置。
103.根据一个示例,无人驾驶飞行器包括连接至无人驾驶飞行器机身的相机90,其中该相机被配置为获取至少一个图像。
104.根据一个示例,相机被配置为相对于无人驾驶飞行器的机身运动。无人驾驶飞行器的处理单元被配置成使相机运动。
105.在一个示例中,相机安装在可延伸臂上。
106.在一个示例中,安装有相机的可延伸臂与安装有液体施用单元的可延伸臂是同一个。
107.在一个示例中,用于激活液体施用单元的位置的确定包括相机的运动。
108.在一个示例中,被配置成使相机运动的无人驾驶飞行器的处理器是被配置成分析环境图像的处理单元。
109.根据一个示例,无人驾驶飞行器被配置成在无人驾驶飞行器已经在环境中着陆之后确定液体施用的位置。
110.根据一个示例,无人驾驶飞行器被配置成在无人驾驶飞行器已经在环境中着陆之前确定液体施用的位置。
111.根据一个示例,无人飞行器包括位置确定装置100。
112.在一个示例中,位置确定装置被配置成当获取至少一个图像时向处理单元提供与相机相关的至少一个位置。
113.该位置可以是对应于地面上精确位置的地理位置,或者可以是参考地面上另外一个或多个位置(例如田地的边界或者无人机对接站或充电站的位置)的地面位置。换句话
说,可以使用绝对的地理位置,或者也可以使用不需要绝对已知而是参考已知位置的地面位置。因此,通过将图像与其被获取的位置关联起来,液体施用单元可以精确地在该位置处被激活。因此,即使当例如无人机已耗尽液体,并飞回更大的贮存器以填充液体时,它也可以继续获取图像以用于在特定位置激活液体施用单元,即使没有立即在该位置处解决,而是在无人机重新填充后施用液体。此外,当无人机确定某个位置应该施用液体,但它没有携带液体时,该信息可以被记录下来,并由该无人机在之后携带所需液体时使用,或者将该信息传输至携带该液体的另一架无人机,并且另一架无人机可以飞到该位置并在该位置施用液体。
114.在一个示例中,该位置是绝对地理位置。
115.在一个示例中,该位置是参考一个或多个已知位置而确定的位置。换句话说,图像可以被确定为与地面上的特定位置相关联,而不知道其精确的地理位置,但是通过得知相对于地面上已知位置的图像获取位置,之后液体施用单元可以在稍后的时间通过使液体施用单元运动至该位置或者使另一个无人驾驶飞行器运动至该位置以在该位置处激活其液体施用单元。
116.在一个示例中,全球定位系统单元用于确定和/或用来确定位置,例如当获取特定图像时相机的位置。
117.在一个示例中,惯性导航单元被单独使用,或者与全球定位系统单元结合使用,以确定位置,例如当获取特定图像时相机的位置。因此,例如,包括例如一个或多个激光陀螺仪的惯性导航单元在已知位置(例如无人机停靠站或充电站)处被校准或归零,并且当它与至少一个相机一起运动时,可以确定远离该已知位置的移动的x、y和z坐标,由此可以确定当获取图像时至少一个相机的位置。
118.在一个示例中,对所获取的图像的图像处理被单独使用,或者与全球定位系统单元结合使用,或者与全球定位系统单元和惯性导航单元结合使用,以确定位置,例如当获取特定图像时相机的位置。换句话说,当飞行器运动时,它可以获取图像,该图像用于产生环境的以及来自特定标记的合成表示,例如树的位置、田地边界、道路等,飞行器可以根据其获取的图像中确定其在合成环境中的位置。
119.根据一个示例,基于风速、风向、降水状态中的一个或多个,来确定着陆并行走到施用液体的位置。
120.根据一个示例,无人驾驶飞行器被配置成从外部系统110接收与风速、风向、降水状态中的一个或多个相关的信息。
121.根据一个示例,无人驾驶飞行器包括风速传感器120、风向传感器130、降水传感器140中的一个或多个。
122.根据一个示例,无人驾驶飞行器被配置为当无人驾驶飞行器已经在环境中着陆时,停止或顺桨至少一组旋翼桨叶。
123.根据一个示例,至少一个保护笼或保护网150围绕至少一组旋翼桨片。
124.根据一个示例,无人驾驶飞行器被配置成在无人驾驶飞行器飞行时飞行至将液体施用到至少一株植物的位置,其中该位置是基于对环境的至少一个图像的一个或多个图像的图像分析来确定的。
125.根据一个示例,处理单元被配置成执行对至少一个图像的分析,以确定无人驾驶
飞行器在飞行时将液体施用到至少一株植物的位置。
126.根据一个示例,处理单元被配置成利用算法来确定无人驾驶飞行器在地面上时,应该行走到的环境中的位置,以将液体施用到至少一株植物上,以及无人驾驶飞行器在空中时,应该飞行到的环境中的位置,以将液体施用到至少一株植物上,其中该确定包括对至少一个图像的分析。
127.根据一个示例,确定无人驾驶飞行器为了施用液体而应该行走到的位置包括利用被配置为给无人驾驶飞行器供电的电池的确定的功率水平和/或包括利用环境所需的确定的操作持续时间。此外,确定无人驾驶飞行器为了施用液体而应该飞行到的位置包括利用被配置为给无人驾驶飞行器供电的电池的确定的功率水平和/或包括利用环境所需的确定的操作持续时间。
128.根据一个示例,至少一个液体施用单元中的每一个位于至少一组旋翼桨片中的一个或多个的下方。
129.根据一个示例,至少一个液体施用单元中的每个液体施用单元位于至少一组旋翼桨片的不同组旋翼桨片的下方。
130.根据一个示例,至少一个液体施用单元包括至少一个喷嘴施用器160或至少一个旋转圆盘施用器170。
131.图2示出了无人驾驶飞行器以其基本步骤将有效成分施用于农作物的方法200的示例。无人驾驶飞行器包括至少一个贮液器、至少一个液体施用单元、至少一组旋翼桨叶和多条支腿。方法200包括:
132.在容纳步骤210,也称为步骤a)中,将包含有效成分的液体容纳在贮液器中,该贮液器封装于无人驾驶飞行器的机身内或附接至该机身,其中至少一个液体施用单元连接至无人驾驶飞行器的机身,并且至少一个液体施用单元与贮液器流体连通;
133.在接收步骤220,也称为步骤b)中,由至少一个液体施用单元接收来自处理单元的至少一个输入,其中该至少一个输入可用于激活至少一个液体施用单元;
134.在飞行步骤230,也称为步骤c)中,使用至少一组旋翼桨叶使无人驾驶飞行器在环境中飞行;
135.在着陆步骤240,也称为步骤d)中,无人驾驶飞行器在环境中着陆,以将液体施用到至少一株植物;和
136.在行走步骤250,也称为步骤e)中,利用多条支腿行走至将液体施用到至少一株植物的位置,其中该位置是基于对环境的至少一个图像的一个或多个图像的图像分析来确定的。
137.在一个示例中,该方法包括由处理单元分析至少一个图像的一个或多个图像,以确定将液体施用到至少一株植物的位置。
138.在一个示例中,分析至少一个图像以确定至少一个施用液体的位置包括确定至少一种类型的杂草,和/或包括确定至少一种类型的疾病,和/或包括确定至少一种类型的害虫,和/或包括确定至少一种类型的昆虫,和/或包括确定至少一种类型的营养缺乏。
139.在一个示例中,该方法包括基于对由相机获取的环境的至少一个图像的一个或多个图像的图像分析来确定无人驾驶飞行器的着陆位置。
140.在一个示例中,为确定着陆位置而分析的一个或多个图像与为确定将液体施用到
至少一株植物的位置而分析的一个或多个图像相同。
141.在一个示例中,为确定着陆位置而分析的一个或多个图像不同于为确定将液体施用到至少一株植物的位置而分析的一个或多个图像。
142.在一个示例中,多条支腿中每一个的远离连接至无人驾驶飞行器的机身之端部的端部包括至少一个稳定结构。
143.在一个示例中,至少一个液体施用单元可相对于无人驾驶飞行器的机身运动,并且其中该方法包括在无人驾驶飞行器的处理单元的控制下使至少一个液体施用单元运动。
144.在一个示例中,至少一个液体施用单元安装在至少一个可延伸臂上。
145.在一个示例中,当无人驾驶飞行器已经着陆并行走到用于将液体施用到至少一株植物的位置时,该方法包括在处理单元的控制下使至少一个液体施用单元运动至特定位置,以基于对环境的至少一个图像的一个或多个图像的图像分析来激活至少一个液体施用单元。
146.在一个示例中,无人驾驶飞行器包括连接至无人驾驶飞行器的机身的相机,其中相机被配置成获取至少一个图像。
147.在一个示例中,相机被配置为相对于无人驾驶飞行器的机身运动,其中无人驾驶飞行器的处理单元被配置为使相机运动。
148.在一个示例中,该方法包括在无人驾驶飞行器已经在环境中着陆之后确定施用液体的位置。
149.在一个示例中,该方法包括在无人驾驶飞行器已经在环境中着陆之前确定施用液体的位置。
150.在一个示例中,无人驾驶飞行器包括位置确定装置。
151.在一个示例中,该方法包括基于风速、风向、降水状态中的一个或多个来决定着陆和行走到施用液体的位置。
152.在一个示例中,该方法包括由无人驾驶飞行器从外部系统中接收与风速、风向、降水状态中的一个或多个相关的信息。
153.在一个示例中,无人驾驶飞行器包括风速传感器、风向传感器、降水传感器中的一个或多个。
154.在一个示例中,该方法包括当无人驾驶飞行器已经在环境中着陆时,停止或顺桨至少一组旋翼桨叶。
155.在一个示例中,至少一个保护笼或保护网围绕至少一组旋翼桨叶。
156.在一个示例中,其中该方法包括在无人驾驶飞行器飞行的同时将无人驾驶飞行器飞行至将液体施用到至少一株植物的位置,其中该方法包括基于对环境的至少一个图像的一个或多个图像的图像分析来确定位置。
157.在一个示例中,该方法包括由处理单元分析至少一个图像,并在无人驾驶飞行器飞行时确定用于将液体施用到至少一株植物的位置。
158.在一个示例中,其中该方法包括利用算法来确定当无人驾驶飞行器在地面上时为将液体施用到环境中的至少一株植物而应该行走到的位置,以及当无人驾驶飞行器在空中时为将液体施用到环境中的至少一株植物而应该飞行到的位置,其中该确定包括对至少一个图像的分析。
159.在一个示例中,其中确定无人驾驶飞行器为施用液体而应该行走到的位置和确定无人驾驶飞行器为施用液体而应该飞行到的位置包括利用被配置为给无人驾驶飞行器供电的电池的确定的功率水平和/或包括利用环境所需的确定的喷洒持续时间。
160.在一个示例中,至少一个液体施用单元中的每一个位于至少一组旋翼桨叶中的一个或多个的下方。
161.在一个示例中,至少一个液体施用单元的每个液体施用单元位于至少一组旋翼桨叶的不同组旋翼桨叶的下方。
162.在一个示例中,至少一个液体施用单元包括至少一个喷嘴施用器或至少一个旋转圆盘施用器。
163.图3a
‑
3f示出了无人驾驶飞行器在环境中飞行和着陆的详细示例。各个数字可以与同一架无人驾驶飞行器相关,也可以与不同的无人驾驶飞行器相关。在图3a中,无人驾驶飞行器(也称为无人机)正在环境中飞行。如图3f所示,无人驾驶飞行器的相机可以获取图像,该图像被分析以确定需要进行喷洒的作物的位置,并且该图像被分析以确定着陆的地点,以便于无人驾驶飞行器可以行走到该位置(见图3c、3d、3e和3f)。如图3b所示,无人驾驶飞行器还对图像进行分析,并确定它应该飞向哪里,并在飞行的同时喷洒作物。无人驾驶飞行器使用一种算法,根据其电池寿命以及喷洒环境所需的时间来确定它应该在哪里着陆,而后行走,以及应该在哪里飞行。这种算法的一个示例是蒙特卡罗最小化路径—例如,该无人驾驶飞行器或不同的无人驾驶飞行器可以扫描环境,以确定哪里需要喷洒作物,然后如图3所示的无人驾驶飞行器确定如何在行走和飞行之间最好地分配喷洒。当在地面上时,如图3f所示,相机可以位于可延伸臂上,以更好地观察环境,并且还可以旋转,并且其中一个喷洒单元也位于可延伸臂上,以更好地喷洒特定的植物或这些植物上的特定部分。也可以使用刷子施用液体化学品,以使化学品被直接地施用。其他喷洒装置直接位于旋翼下方,以这种方式,喷雾被夹带在下洗流中,并且由于风,喷雾所遭受的飘失减少。当无人驾驶飞行器在地面上时,旋翼仍然可以工作以用于夹带喷雾,而不会产生足以起飞的升力,并且当无人驾驶飞行器在飞行的同时进行喷洒时,这种夹带也适用。笼或网(未示出)围绕每个旋翼,以使旋翼不会被植物所损坏,并且植物不会被旋翼损坏。
164.而后处理单元50运行另外的图像处理软件(如果使用的话),该软件可以是基于特征提取以确定植物位置的图像处理的一部分。该软件包括机器学习分析器。获取特定杂草的图像,以及与所用的杂草大小有关的信息。可以用图像来标记与世界上发现这种杂草的地理位置有关的信息,以及与在一年中发现这种杂草的时间有关的信息,包括何时开花等。杂草的名字也可以用杂草的图像来标记。而后,机器学习分析器可以基于人工神经网络或决策树分析器,根据所获取的地面实况图像进行训练。以这种方式,当植物的新图像(其中这种图像可以具有相关联的时间特征,例如在一年中的时间,以及标记于其上的地理位置,例如德国或南非)被呈现给分析器时,分析器通过将新图像中所发现的杂草的图像与其已经过训练的不同杂草的图像进行比较以确定图像中杂草的特定类型,其中杂草的大小以及它们生长的位置和时间都可以被考虑在内。因此,可以确定该杂草类型在环境中的地面上的具体位置及其大小。
165.以这种方式,由于直接处理目标杂草、昆虫和疾病而不是处理整个作物,因此所需要的有效成分显著减少。此外,产品可以直接施用,并且不需要首先在较大体积的水中稀释
以用于喷洒施用。这具有额外的优点,即无人机所携带的施用产品的重量可以显著降低,从而允许使用更小、更便宜且更高效的无人机,并且在电池充电或更换之间具有更长的操作时间。类似地,这种施用方法允许配方师利用具有较少沉积物的更加浓缩的有效成分及表面活性剂的优势。
166.因此,可以利用专门设计的具有适当物理稳定性的制剂,为作物提供适当的润湿性,为有效成分提供适当的生物传递性,以及适当的抗雨水冲刷性。
167.飘失所造成的目标偏离损失可以大大减少,甚至可以有效地消除,从而允许在人口密集和环境敏感的区域进行施用。此外,无人机可以继续在风力太强而不适合用于产生很低水平喷雾飘失的施用方法的条件下运行。
168.无人机可以自主操作,从而减少了控制农作物中的目标所需的劳动力。
169.来自相机的图像可以通过合适的图像分析软件进行分析,以识别目标。这可以在具有专用的处理单元的无人机上自主执行,也可以在有/没有操作人员输入的情况下由单独的处理单元远程执行。
170.杂草类型的确定
171.以下涉及一种方法,可以通过该方法处理图像以确定植物/杂草的类型,如本领域技术人员所理解的,该方法也可用于检测昆虫的类型:
172.1.获取植物的图像。
173.2.例如通过绘制轮廓,将植物的不同部分分割。
174.3.通过人工神经网络分析部分边界内(例如轮廓内)的图像数据,以确定杂草的类型。
175.4.上述内容可以用于从一种作物中确定另一种作物,以及探测并识别昆虫。
176.需要注意的是,本发明的实施例是参考不同的主题来描述的。特别地,一些实施例是参考方法类型的权利要求而描述,而另一些实施例是参考设备类型的权利要求而描述的。然而,本领域技术人员将从以上和以下的描述中了解到,除非另有说明,除了属于一种主题的特征的任何组合之外,与不同主题相关的特征之间的任何组合也被认为是与本技术一起公开的。然而,所有的特征都可以组合起来,提供比简单的特征叠加更好的协同效果。
177.虽然已经在附图和前文的描述中详细地示出并描述了本发明,但是这种示出及描述被认为是说明性的或示例性的,而非限制性的。本发明不限于所公开的实施例。通过对附图、公开内容和从属权利要求的研究,本领域技术人员在实施所要求保护的发明时可以理解和实现所公开实施例的其他变型。
178.在权利要求中,词语“包括”不排除其他元件或步骤,不定冠词“一”或“一个”不排除复数。单个处理器或其他单元可以实现权利要求中记载的若干项的功能。在相互不同的从属权利要求中引用某些措施这一事实并不表示这些措施的组合不能有利地使用。权利要求书中的任何附图标记不应被解释为对范围的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。