1.本发明涉及无人机领域,尤其涉及一种折叠直升机旋翼系统和免支架的轻型无人机。
背景技术:
2.无人机进入植保市场以来,其高空作业方式有利于植物的生长、不破坏植物,逐步代替了传统的作业方式,备受广大用户的青睐。但是由于载重、续航和下压风场问题,致使工作效率和防治效果一般。
3.无人机已经广泛应用于警力、城市管理、农业、地质、气象、电力等领域,无人机的飞行控制计算机系统是无人机
ꢀ“
大脑”的核心,是飞行控制系统的中央控制单元,其运算速度对无人机的控制有至关重要的作用。
4.目前无人机多数为消费级的,其控制计算机相对工业级来说比较简单。如多旋翼无人机,本身是从航模发展过来的,就相当于是一个大的航模,其特点是入门门槛低,容易操作,价格更便宜,备受广大消费者青睐。
5.折叠式无人机因为能够折叠,整体体积小,因此广被青睐,不过目前的折叠式无人机存在使用不方便、回收不方便等问题。
技术实现要素:
6.发明的目的:为了提供效果更好的多方案无人机综合系统,具体目的见具体实施部分的多个实质技术效果。
7.为了达到如上目的,本发明采取如下技术方案:第一发明:一种折叠直升机旋翼系统和免支架的轻型无人机;第二发明:一种防弹减震无人机和方法;第三发明:一种多用途无人机和方法;第四发明:多面传动的无人机和面齿;第五发明:一体化齿条发射车和定位无人机和发射定位系统;第六发明:无人机控制方法;第一个发明一种折叠直升机旋翼系统和免支架的轻型无人机主要是独特的螺旋桨设计和去支撑腿设计,第二层螺旋桨用于支地,支地小车在螺旋桨启动的时候会脱离,或者是螺旋桨端部设置支地的小钢珠;能够突出降低整体的质量,减少大量的部件,降低成本;第二个发明一种防弹减震无人机和方法是:自身发动机初步冲击弹射即利用自身的火药进行自发射,加上空中开车进而实现螺旋桨迅速起飞;技术的核心,在于冲击,冲击的位置,有两种选择,一种是独立冲击结构,一种是基于支腿的底部冲击结构,支腿底部有小冲击结构。同时在空中能够进行瞬移位态调整。而不是借助辅助的结构;第三个发明一种多用途无人机和方法是能够回收的无人机,同时在齿轮的面上设
置凹槽,凹槽用于容纳轴承的滚珠进而进行进一步限位,让两个齿轮和轴承的转动球形成类似三明治的夹持结构,保证稳定;第四发明:多面传动的无人机和面齿核心是去掉了一个轴承,大大降低成本,直接去掉了一个轴承,不会出现轴承磨损损坏的问题,利用齿定位实现高度同步;第五发明:一体化齿条发射车和定位无人机和发射定位系统是基于前四组发明对发射车的改进;第六发明:无人机控制方法。
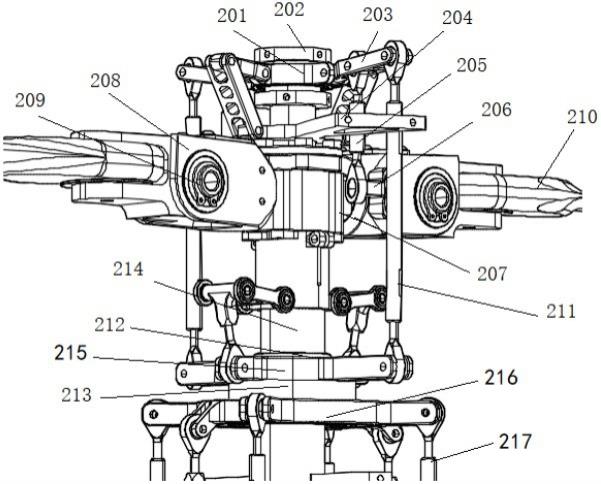
8.第一发明:一种折叠直升机旋翼系统和免支架的轻型无人机;一种折叠直升机旋翼系统,其特征在于,螺旋桨部分包含彼此嵌套的上转动轴214和下转动轴225,上转动轴214上安装有上转动集团224,下转动轴225上安装有下转动集团221;上转动集团224包含固定在上转动轴214上的转动内轴卡箍207,转动内轴卡箍207上布置有一个以上的折叠桨箍208,折叠桨箍转动轴226和转动内轴卡箍207一体连接并且折叠桨箍转动轴基于转动内轴卡箍207朝外伸出,折叠桨箍208套在折叠桨箍转动轴226上并且能够围绕折叠桨箍转动轴226转动;折叠桨箍208中部通过转动轴和扭簧209可转动安装着桨叶210;下转动集团221包含固定在下转动轴225的转动内轴卡箍207,转动内轴卡箍207上布置有一个以上的折叠桨箍208,折叠桨箍转动轴226和转动内轴卡箍207一体连接并且折叠桨箍转动轴基于转动内轴卡箍207朝外伸出,折叠桨箍208套在折叠桨箍转动轴226上并且能够围绕折叠桨箍转动轴226转动;折叠桨箍208中部通过转动轴和扭簧209可转动安装着桨叶210;还包含能够对上转动集团224进行角度调整的上转动部分调整系统;还包含能够对下转动集团221进行角度调整的下转动部分调整系统;下转动部分调整系统包含下移动盘219,下移动盘219上方包含可转动的下转动集团下转盘218,下移动盘219下方包含的盘铰接着舵机转动轴220;舵机转动轴220朝上运动的时候能够让下移动盘219朝上运动;下转动集团下转盘218上铰接着调整转向铰接轴227,调整转向铰接轴227上端通过转向铰接位置228铰接折叠桨箍208,并且调整转向铰接轴227能够调整折叠桨箍208的转动角度和方向;下转动集团上转盘216、下联动杆子217、下转动集团下转盘218、调整转向铰接轴227均属于下转动集团221对应的下转动部分调整系统;下转动集团221和下转动部分调整系统能够一起转动;下转动集团下转盘218通过一个以上的下联动杆子217铰接着下转动集团上转盘216;下转动集团下转盘218和下转动集团上转盘216内部各自包含轴承因此能够转动;上转动部分调整系统包含上移动盘213,上移动盘213上方包含可转动的上转动集团下转盘215,上移动盘213下方包含下转动集团上转盘216;下联动杆子217朝上运动的时候能够让上移动盘213能朝上运动;上转动集团下转盘215通过上联动杆子211铰接着固定盘上动力铰接轴203,固定盘上动力铰接轴203一侧铰接着顶部盘201,顶部盘201位于两个固定盘限定盘202之间,两个固定盘限定盘202固定在上转动轴214上,固定盘上动力铰接轴203中部铰接着上调整转向铰接轴205,上调整转向铰接轴205通过上转向铰接位置铰接折叠桨箍208,并且上调整转向铰接轴205能够调整折叠桨箍208的转动角度和方向;上移动盘
213上下运动能够带动上联动杆子211运动,进一步能够相对带动固定盘上动力铰接轴203运动,进一步能够相对带动上调整转向铰接轴205运动,进一步能够带动折叠桨箍208转动进而调整折叠桨箍208的转动角度和方向;上转动集团下转盘215、固定盘上动力铰接轴203、上联动杆子211、调整转向铰接轴205、顶部盘201属于上转动集团224对应的上转动部分调整系统;顶部盘201、上转动集团下转盘215内部包含轴承因此能够转动;上转动集团224和上转动部分调整系统能够一起转动。
9.本发明进一步技术方案在于,上转动集团224和下转动集团221二者转动方向不一致。
10.本发明进一步技术方案在于,上转动集团224和下转动集团221二者各自包含两个桨叶并且两个桨叶彼此对称布置。
11.本发明进一步技术方案在于,彼此嵌套的上转动轴214和下转动轴225二者同心布置;二者之间安装有一个以上的轴承使得二者能够彼此不影响地进行转动。
12.本发明进一步技术方案在于,上转动轴214的直径小于下转动轴225的直径。
13.本发明进一步技术方案在于,上转动轴214中部包含中心轴,中心轴为空心,线路走在中心轴中。
14.免支架的轻型无人机,其特征在于,利用如上所述的一种折叠直升机旋翼系统,上转动集团224包含的桨叶210的长度小于下转动集团221包含的桨叶210的长度;因此下转动集团221包含的桨叶210朝下弯折的时候,能够当作支撑结构。
15.本发明进一步技术方案在于,在无人机顶部的支架上,固定有上流线罩1002,上流线罩1002端部包含上吊环1001,上吊环1001用于吊装吊起,上流线罩1002用于瞬间辅助发射降低阻力;下转动集团221包含的桨叶210的端部包含起飞底嵌入滚珠1003,起飞底嵌入滚珠1003嵌入或者安装在桨叶的端部,起飞底嵌入滚珠1003用于下螺旋桨起飞的时候相对地面转动辅助起飞降低和地面的摩擦力。
16.采用如上技术方案的本发明,相对于现有技术有如下有益效果:功能多样,可折叠,使用效果更好,更安全,能回收,能够实现自身的保护,能够采用辅助动力升降。
附图说明
17.为了进一步说明本发明,下面结合附图进一步进行说明:图1为发明上转动集团的示意图;图2为发明下转动集团的示意图;图3为上转动集团和下转动集团的整体示意图;图4为图1的局部放大图;图5为动力部分的传动图;图6为动力部分的示意图;图7为发动机和离合器的示意图之一;图8为发动机和离合器的示意图之二;图9为发动机和离合器的示意图之三;图10为底部护罩的结构透视图;
图11为发动机和离合器的结构图;图12为无人机底部示意图;图13为无人机底部上方部分示意图;图14为为无人机底部下方部分示意图;图15为无人机整体图;图16为下方轴固定齿轮和上方轴固定齿轮的新型对接图;图17为下方轴固定齿轮和上方轴固定齿轮的间隙夹持图;图18为无人机底部的进一步改进图;图19为支撑腿的进一步改进图;图20为动力传动的示意图;图21为支撑腿的带尖顶的进一步改进图;图22为专利的进一步改进示意图;图23为一体化齿条发射车的技术方案示意图;图24为单筒发射筒的结构示意图;图25为发明的控制逻辑图;图26为发明的发射步骤图;图27为发明的飞行后的飞机动态图;其中:101动力输入轴;102.动力输入齿轮;103.下方一级传动齿轮;104.上方一级传动齿轮;105.下方同轴传动齿轮;106.上方同轴传动齿轮;107下方轴固定齿轮;108.上方轴固定齿轮;201.顶部盘;202.固定盘限定盘;203.固定盘上动力铰接轴;204.蒙皮固定结构;205.上转向轴;206.转向基座连接轴;207.转动内轴卡箍;208.折叠桨箍;209.转动轴和扭簧;210.桨叶;211.上联动杆子;212.上转动轴承;213.上移动盘;214.上转动轴;215.上转动集团下转盘;216.下转动集团上转盘;217.下联动杆子;218.下转动集团下转盘;219.下移动盘;220.舵机转动轴;221.下转动集团;222.舵机;223.舵机固定板;224.上转动集团;225.下转动轴;226.折叠桨箍转动轴;227.调整转向铰接轴;228.转向铰接位置;301输出轴;302固定盘;303启动盘;304输出轴固定架;305离合器;306曲轴; 307发动机上固定架;308油门舵机; 309曲轴箱;310发动机固定轴;311发动机下固定盘;313起动机固定架;314启动盘轴;315启动机飞轮;316启动机;317冷却液进口;318火花塞;319排气口;320缸套;321冷却液出口;401风扇罩;402水泵;403水箱;404飞控;405组合导航;406电源;407油泵;408油箱;409激光雷达;410导引头;5.支撑腿;601.面齿;602.中部空间;603.滚子轴承;701.燃料容器;702.底部冲口管;703.底部冲口;801.底部护罩;901.支撑脚尖刺;8011.内壁;8012.空腔孔;8013.夹层;8014.外壁;1001.上吊环;1002.上流线罩;1003.起飞底嵌入滚珠;1101.电机及其加速机;1102.动力输出轴;1103.动力输出齿轮;1104.离合器动力输入齿轮;1105.发射离合器;1106.下位动力齿轮;1107.一级锥齿轮系统;1108.一级动力横轴;1109.二级动力竖轴;1110.二级锥齿轮系统;1111.弹射动力轴;1112.推进齿轮;1113.齿条;1114.下位发射筒;1115.单元无人机;1116.发射部分支架;1117.中转齿轮;1118.齿轮安装支架;1119.单筒发射筒;1120.中转转向齿轮。
具体实施方式
18.下面结合附图和具体实施方式,进一步阐明本发明,应理解下述具体实施方式仅用于说明本发明而不用于限制本发明的范围。在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”、“顶”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
19.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
20.本专利提供多种并列方案,不同表述之处,属于基于基本方案的改进型方案或者是并列型方案。每种方案都有自己的独特特点。此外,下面所描述的本发明不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。文中未表述的固定方式,可以是螺纹固定,螺栓固定或者是胶水粘结等任意一种固定方式。
21.实施例一:结合全部附图;一种折叠直升机旋翼系统,其特征在于,螺旋桨部分包含彼此嵌套的上转动轴214和下转动轴225,上转动轴214上安装有上转动集团224,下转动轴225上安装有下转动集团221;上转动集团224包含固定在上转动轴214上的转动内轴卡箍207,转动内轴卡箍207上布置有一个以上的折叠桨箍208,折叠桨箍转动轴226和转动内轴卡箍207一体连接并且折叠桨箍转动轴基于转动内轴卡箍207朝外伸出,折叠桨箍208套在折叠桨箍转动轴226上并且能够围绕折叠桨箍转动轴226转动;折叠桨箍208中部通过转动轴和扭簧209可转动安装着桨叶210;下转动集团221包含固定在下转动轴225的转动内轴卡箍207,转动内轴卡箍207上布置有一个以上的折叠桨箍208,折叠桨箍转动轴226和转动内轴卡箍207一体连接并且折叠桨箍转动轴基于转动内轴卡箍207朝外伸出,折叠桨箍208套在折叠桨箍转动轴226上并且能够围绕折叠桨箍转动轴226转动;折叠桨箍208中部通过转动轴和扭簧209可转动安装着桨叶210;还包含能够对上转动集团224进行角度调整的上转动部分调整系统;还包含能够对下转动集团221进行角度调整的下转动部分调整系统;下转动部分调整系统包含下移动盘219,下移动盘219上方包含可转动的下转动集团下转盘218,下移动盘219下方包含的盘铰接着舵机转动轴220;舵机转动轴220朝上运动的时候能够让下移动盘219朝上运动;下转动集团下转盘218上铰接着调整转向铰接轴227,调整转向铰接轴227上端通过转向铰接位置228铰接折叠桨箍208,并且调整转向铰接轴227
能够调整折叠桨箍208的转动角度和方向;下转动集团上转盘216、下联动杆子217、下转动集团下转盘218、调整转向铰接轴227均属于下转动集团221对应的下转动部分调整系统;下转动集团221和下转动部分调整系统能够一起转动;下转动集团下转盘218通过一个以上的下联动杆子217铰接着下转动集团上转盘216;下转动集团下转盘218和下转动集团上转盘216内部各自包含轴承因此能够转动;上转动部分调整系统包含上移动盘213,上移动盘213上方包含可转动的上转动集团下转盘215,上移动盘213下方包含下转动集团上转盘216;下联动杆子217朝上运动的时候能够让上移动盘213能朝上运动;上转动集团下转盘215通过上联动杆子211铰接着固定盘上动力铰接轴203,固定盘上动力铰接轴203一侧铰接着顶部盘201,顶部盘201位于两个固定盘限定盘202之间,两个固定盘限定盘202固定在上转动轴214上,固定盘上动力铰接轴203中部铰接着上调整转向铰接轴205,上调整转向铰接轴205通过上转向铰接位置铰接折叠桨箍208,并且上调整转向铰接轴205能够调整折叠桨箍208的转动角度和方向;上移动盘213上下运动能够带动上联动杆子211运动,进一步能够相对带动固定盘上动力铰接轴203运动,进一步能够相对带动上调整转向铰接轴205运动,进一步能够带动折叠桨箍208转动进而调整折叠桨箍208的转动角度和方向;上转动集团下转盘215、固定盘上动力铰接轴203、上联动杆子211、调整转向铰接轴205、顶部盘201属于上转动集团224对应的上转动部分调整系统;顶部盘201、上转动集团下转盘215内部包含轴承因此能够转动;上转动集团224和上转动部分调整系统能够一起转动。
22.本处的技术方案所起到的实质的技术效果及其实现过程为如下:彼此嵌套的上转动轴214和下转动轴225各自能够转动,因此带动桨叶转动;因为折叠桨箍208中部通过转动轴和扭簧209可转动安装着桨叶210,因此桨叶210能够落下和展开,当转动的时候桨叶210即能够因为甩飞的惯性进行转动。上转动部分调整系统和下转动部分调整系统能够对上转动集团和下转动集团进行调整,进一步实现基本位态的调整。上移动盘213上下移动能够相对移动转动集团的高度。
23.实施例二:作为进一步的可改进方案或者并列方案或可选择的独立方案,上转动集团224和下转动集团221二者转动方向不一致。
24.本处的技术方案所起到的实质的技术效果及其实现过程为如下:转动的方向不一致是采用齿轮系的传动实现的,进一步实现无人机的升降。
25.实施例三:作为进一步的可改进方案或者并列方案或可选择的独立方案,上转动集团224和下转动集团221二者各自包含两个桨叶并且两个桨叶彼此对称布置。本处的技术方案所起到的实质的技术效果及其实现过程为如下:对称布置能够方便实现均衡的转动。
26.实施例四:作为进一步的可改进方案或者并列方案或可选择的独立方案,彼此嵌套的上转动轴214和下转动轴225二者同心布置;二者之间安装有一个以上的轴承使得二者能够彼此不影响地进行转动。
27.实施例五:作为进一步的可改进方案或者并列方案或可选择的独立方案,上转动轴214的直径小于下转动轴225的直径。本处的技术方案所起到的实质的技术效果及其实现过程为如下:本处的直径布置为优选的直径布置,类似的直径布置方式均在本专利的保护范围内。
28.实施例六:作为进一步的可改进方案或者并列方案或可选择的独立方案,上转动轴214中部包含中心轴,中心轴为空心,线路走在中心轴中。
29.实施例七:作为进一步的可改进方案或者并列方案或可选择的独立方案,上转动轴214和下转动轴225上各自连接有蒙皮固定结构204,通过蒙皮固定结构204使得上转动轴214和下转动轴225各自安装有蒙皮,蒙皮固定结构204上包含螺钉固定孔,蒙皮通过螺钉固定孔固定在蒙皮固定结构204上。本处的技术方案所起到的实质的技术效果及其实现过程为如下:蒙皮能够避免外物影响无人机的机械传动部分,避免外物影响无人机的运行。
30.实施例八:作为进一步的可改进方案或者并列方案或可选择的独立方案,还包含齿轮传动部分,上转动轴214下方固定有上方轴固定齿轮108,下转动轴225下方固定有上方轴固定齿轮108,上方轴固定齿轮108啮合上方同轴传动齿轮106,上方同轴传动齿轮106和上方一级传动齿轮104同轴安装,上方一级传动齿轮104啮合动力输入齿轮102,动力输入齿轮102位于动力输入轴101上;下转动轴225上固定有下方轴固定齿轮107,下方轴固定齿轮107啮合下方同轴传动齿轮105,下方同轴传动齿轮105和下方一级传动齿轮103同轴安装,下方一级传动齿轮103啮合动力输入齿轮102。本处的技术方案所起到的实质的技术效果及其实现过程为如下:本实施例提供了具体的动力传动部分,能够实现精密而高速的传动;类似的实现方式和精密传动均在本专利的保护范围内。
31.实施例九:作为进一步的可改进方案或者并列方案或可选择的独立方案,上方轴固定齿轮108和下方轴固定齿轮107二者之间包含滚子轴承。本处的技术方案所起到的实质的技术效果及其实现过程为如下:结合图20,滚子轴承能够让上方轴固定齿轮108和下方轴固定齿轮107彼此不影响地进行运转。
32.实施例十:作为进一步的可改进方案或者并列方案或可选择的独立方案,作为实施例九的进一步优选,上方轴固定齿轮108和下方轴固定齿轮107的面上各自包含凹槽,滚子轴承的滚子能够顺着凹槽进行移动,进而实现上方轴固定齿轮108、下方轴固定齿轮107、滚子轴承彼此不影响进行运行且凹槽有定位作用,进而使得直升机的上转动部分和下转动部分彼此独立运行,互不干扰。
33.实施例十一:作为进一步的可改进方案或者并列方案或可选择的独立方案,还包含能够给齿轮传动部分传递能量的动力部分,动力部分包含发动机以及离合器305,离合器305的输出轴301对接动力输入轴,发动机上固定架307和发动机下固定盘312之间包含发动机固定轴310,多个发动机固定轴310之间包含发动机、离合器305;发动机还包含冷却部分,冷却部分包含冷却液进口317和冷却液出口321,冷却液进口317和冷却液出口321之间为冷却空间,冷却空间为一个中空壳体,通过冷却液的循环能够降低发动机的温度。本处的技术方案所起到的实质的技术效果及其实现过程为如下:本实施例提供了具体的动力部分和离合部分,能够实现具体的动力提供。
34.实施例十二:作为进一步的可改进方案或者并列方案或可选择的独立方案,动力部分的下方包含风扇罩401,风扇罩401内部有风扇。本处的技术方案所起到的实质的技术效果及其实现过程为如下:风扇能够进行降温。
35.实施例十三:作为进一步的可改进方案或者并列方案或可选择的独立方案,发动机上固定架307上固定有发动机的起动机316。
36.实施例十四:作为进一步的可改进方案或者并列方案或可选择的独立方案,风扇
罩401下方布置有水泵402,水泵402能够从水箱403中抽水。本处的技术方案所起到的实质的技术效果及其实现过程为如下:水泵中的水能够用来降温、消防或者喷药,喷药的时候里边放置药液就行了。
37.实施例十五:作为进一步的可改进方案或者并列方案或可选择的独立方案,水泵402和水箱403的边侧的空间中布置有飞控404、组合导航405、电源406。本处的技术方案所起到的实质的技术效果及其实现过程为如下:本实施例提供了具体的飞控的布置位置和方式,类似的实现方式均在本专利的保护范围内。
38.实施例十六:作为进一步的可改进方案或者并列方案或可选择的独立方案,水泵402和水箱403的下方布置有油泵407和油箱408,油泵407和油箱408能够给发动机供油。
39.实施例十七:作为进一步的可改进方案或者并列方案或可选择的独立方案,无人机的底部包含激光雷达409和导引头410。本处的技术方案所起到的实质的技术效果及其实现过程为如下:激光雷达409和导引头410能够进行测距和地理位置的获取,进而为飞行提供基本信息。
40.实施例十八:作为进一步的可改进方案或者并列方案或可选择的独立方案,无人机的壳体上包含支撑腿5,支撑腿5为能够折叠的支撑腿。本处的技术方案所起到的实质的技术效果及其实现过程为如下:支撑腿能够作为支撑,方便无人机在地面的稳固。
41.实施例十九:作为进一步的可改进方案或者并列方案或可选择的独立方案,支撑腿通过舵机能够实现收缩。本处的技术方案所起到的实质的技术效果及其实现过程为如下:支撑腿的收缩的实现方式和结构很多,类似的实现结构和实现方式均在本专利的保护范围内。比如支撑腿还可以是固定的支撑腿。
42.实施例二十:作为进一步的可改进方案或者并列方案或可选择的独立方案,支撑腿5端部布置有燃料容器701,燃料容器701内部布置有点火装置和起飞火药,燃料容器701连通着底部冲口管702,底部冲口管702的端部为底部冲口703,点火后能够朝下冲击。本处的技术方案所起到的实质的技术效果及其实现过程为如下:本实施例为开创性的设计,在支撑腿的底部提供了具体的喷射结构,进一步能够实现螺旋桨提供动力的同时,能够让无人机进行喷射起飞助力。
43.具体实现的过程为如下任意方式之一:1.燃料容器701中的燃料被点火,因此整体形成朝上的喷射力,进一步带动无人机本体朝上相对运动,当无人机本体上升到目的高度的时候,螺旋桨启动,进一步让上转动集团和下转动集团转动,进而实现快速起飞;利用反冲力和螺旋桨共同实现起飞;本方式的独特之处,是利用支腿进行支撑和起飞。本方式的名字也可以称为:一种辅助冲击和螺旋桨共同起飞的方法。用于快速起飞,降低启动时间;2.当无人机飞行在空中的时候,间歇性启动多个燃料容器701中的任意一个,进而能够快速让无人机在空中实现位置调整。该实施例用于无人机在空中进行迅速变位的时候实现的。本方式的名字也可以称为:一种快速调整无人机位置的方法。用于侧向快速移动,用于避障或者是避免临近飞行物;3.当无人机落地的时候,间歇性启动多个燃料容器701中的任意一个,进而能够快速让无人机速度降低,进而实现缓着陆。本方式的名字也可以称为:一种基于无人机支腿的缓着陆的方法。
44.实施例二十一:作为进一步的可改进方案或者并列方案或可选择的独立方案,点火装置通信连接着无人机的中控部分。本处的技术方案所起到的实质的技术效果及其实现过程为如下:本实施例能够实现联合控制。
45.实施例二十二:作为进一步的可改进方案或者并列方案或可选择的独立方案,底部冲口管702包含支撑脚尖刺901,支撑脚尖刺901能插入地下。本处的技术方案所起到的实质的技术效果及其实现过程为如下:支撑脚尖刺901能插入地下进而实现稳定固定,固定效果和定位效果更好。
46.实施例二十三:作为进一步的可改进方案或者并列方案或可选择的独立方案,上方轴固定齿轮108和下方轴固定齿轮107二者各自包含面齿601,上方轴固定齿轮108和下方轴固定齿轮107二者的面齿601能够啮合进而实现契合转动。本处的技术方案所起到的实质的技术效果及其实现过程为如下:本实施例为实施例九的并列实施例,不过本实施例更好的效果是,齿轮具有磨损程度小的优点,因此能够降低磨损,不像滚子轴承属于损耗品,因此能够降低成本。
47.实施例二十四:作为进一步的可改进方案或者并列方案或可选择的独立方案,激光雷达409和导引头410外部包含能够保护二者的底部护罩801。本处的技术方案所起到的实质的技术效果及其实现过程为如下:能够避免激光雷达409和导引头410落地的时候被破坏。
48.实施例二十五:作为进一步的可改进方案或者并列方案或可选择的独立方案,底部护罩801为夹层式结构,夹层式结构包含内壁8011和外壁8014,内壁8011和外壁8014之间为夹层8013;夹层中布置有一组以上的空腔孔8012。本处的技术方案所起到的实质的技术效果及其实现过程为如下:夹层结构更耐撞击。
49.实施例二十六:作为进一步的可改进方案或者并列方案或可选择的独立方案,夹层8013中布置有聚脲,聚脲为弹性材质,能够减少震动并进行缓冲。本处的技术方案所起到的实质的技术效果及其实现过程为如下:聚脲可以减震,同时能够防弹。
50.实施例二十七:作为进一步的可改进方案或者并列方案或可选择的独立方案,空腔孔8012为通道,通道为冲击通道,其中填充有火药,火药点燃后能够提供朝下的冲击力。本处的技术方案所起到的实质的技术效果及其实现过程为如下:点燃火药,提供反冲力用于无人机的快速升空。
51.实施例二十八:作为进一步的可改进方案或者并列方案或可选择的独立方案,上转动集团224包含的桨叶210的长度小于下转动集团221包含的桨叶210的长度;因此下转动集团221包含的桨叶210朝下弯折的时候,能够当作支撑结构。本处的技术方案所起到的实质的技术效果及其实现过程为如下:本实施例独特的地位在于,不用支撑腿了,能够让螺旋桨和下边的桨叶二合一,进而减少无人机机身的附着,进而降低整体质量,让无人机更容易升空。
52.实施例二十九:作为进一步的可改进方案或者并列方案或可选择的独立方案,底部护罩801包含尖刺结构,尖刺结构能够插入地下。本处的技术方案所起到的实质的技术效果及其实现过程为如下:用于落地的时候避免倾倒,进一步保护无人机,用于无人机的防护。
53.实施例三十:作为进一步的可改进方案或者并列方案或可选择的独立方案,在无
人机壳体上包含凹槽,当桨叶210竖直朝向地下的时候,桨叶位于该凹槽中。本处的技术方案所起到的实质的技术效果及其实现过程为如下:凹槽并未画出来,让桨叶在收纳的时候更平顺,避免破坏无人机的流线型本体。
54.实施例三十一:作为进一步的可改进方案或者并列方案或可选择的独立方案,所述的桨叶210为空心的桨叶。本处的技术方案所起到的实质的技术效果及其实现过程为如下:空心的桨叶质量小,方便整体升空。
55.实施例三十二:作为进一步的可改进方案或者并列方案或可选择的独立方案,一体化齿条发射车,其特征在于,发射车包含发射部分支架1116,发射部分支架包含一个以上的下位发射筒1114,一个以上的下位发射筒1114并列布置,在发射部分支架1116中布置有发射定位系统,发射定位系统包含电机及其加速机1101,电机及其加速机1101的动力输出轴1102的动力输出齿轮1103啮合一个以上的齿轮,一个以上的齿轮分别为离合器动力输入齿轮1104和中转转向齿轮1120,离合器动力输入齿轮1104连接的轴通入发射离合器1105,发射离合器1105的动力输出轴上为下位动力齿轮1106,下位动力齿轮1106动力连接着一级动力横轴1108上的一级锥齿轮系统1107,一级锥齿轮系统1107的两个锥齿轮分别位于一级动力横轴1108和二级动力竖轴1109上,二级动力竖轴1109端部包含二级锥齿轮系统1110,二级锥齿轮系统1110的动力能够通过锥齿轮传递给弹射动力轴1111,弹射动力轴1111的动力能够传递给推进齿轮1112所在的轴,推进齿轮1112啮合无人机蒙皮上布置的齿条1113;发射离合器1105能够控制动力是否接入;一级锥齿轮系统1107和二级锥齿轮系统1110能够实现动力转向和多向传递使得无人机两侧的齿条被同时推动。本处的技术方案所起到的实质的技术效果及其实现过程为如下:本实施例开创性提供了一种新型的武器发射系统,该武器可以是本专利的无人机,也可以是火箭弹或者是其他弹类。该武器系统的突出特点是:采用纯粹的机械系统。作用有二:1.定位喷射的机器的中部位置,避免和筒壁碰撞造成事故,这个系统可以借鉴到导弹系统;2.高速电机 高频加速器,计算好整体质量,能够高速完成投射。对称设置齿轮,锥齿轮三级改向,两侧和底部是发射车;中间是发射筒中部是无人机机体。用机械的方式进行发射,不涉及电路控制,更适合战场环境,因此更稳定,也不用高压空气,因为高压空气有冲击力,对武器不好,尤其是含有弹药的武器,容易发生安全事故。这个系统设置多组多出口,采用离合器进行调控不同的孔就行了。
56.实施例三十三:作为进一步的可改进方案或者并列方案或可选择的独立方案,一个以上的齿轮安装在齿轮安装支架1118上。
57.实施例三十四:作为进一步的可改进方案或者并列方案或可选择的独立方案,发射部分支架1116下方包含液压缸,液压缸布置在发射车的后车厢上,发射部分支架1116能够被发射车调整角度。本处的技术方案所起到的实质的技术效果及其实现过程为如下:类似的角度调整系统均在本专利的保护范围内。
58.实施例三十五:作为进一步的可改进方案或者并列方案或可选择的独立方案,所述的齿条包含两组且两组齿条围绕无人机的本体对称布置。本处的技术方案所起到的实质的技术效果及其实现过程为如下:两侧推出,稳定性更好。
59.实施例三十六:作为进一步的可改进方案或者并列方案或可选择的独立方案,推进齿轮1112能够啮合齿条,在推进齿轮1112未启动的时候,控制无人机和发射筒筒壁之间的距离,避免无人机和发射筒筒壁之间相互撞击;即推进齿轮1112能够定位喷射的机器的
中部位置,避免无人机和筒壁碰撞造成事故。
60.实施例三十七:作为进一步的可改进方案或者并列方案或可选择的独立方案,电机及其加速机1101的加速机为多级齿轮加速系统。
61.实施例三十八:作为进一步的可改进方案或者并列方案或可选择的独立方案,发射定位系统,其特征在于,发射定位系统包含电机及其加速机1101,电机及其加速机1101的动力输出轴1102的动力输出齿轮1103啮合一个以上的齿轮,一个以上的齿轮分别为离合器动力输入齿轮1104和中转转向齿轮1120,离合器动力输入齿轮1104连接的轴通入发射离合器1105,发射离合器1105的动力输出轴上为下位动力齿轮1106,下位动力齿轮1106动力连接着一级动力横轴1108上的一级锥齿轮系统1107,一级锥齿轮系统1107的两个锥齿轮分别位于一级动力横轴1108和二级动力竖轴1109上,二级动力竖轴1109端部包含二级锥齿轮系统1110,二级锥齿轮系统1110的动力能够通过锥齿轮传递给弹射动力轴1111,弹射动力轴1111的动力能够传递给推进齿轮1112所在的轴,推进齿轮1112啮合无人机蒙皮上布置的齿条1113;发射离合器1105能够控制动力是否接入;一级锥齿轮系统1107和二级锥齿轮系统1110能够实现动力转向和多向传递使得无人机两侧的齿条被同时推动。
62.实施例三十九:作为进一步的可改进方案或者并列方案或可选择的独立方案,定位无人机,其特征在于,无人机两侧固定有齿条。
63.实施例四十:作为进一步的可改进方案或者并列方案或可选择的独立方案,单兵发射助力无人机,其特征在于,包含单筒壳体,单筒壳体中布置有,电机及其加速机1101,电机及其加速机1101的动力输出轴动力连接有的动力输出齿轮1103动力连接着一级动力横轴1108上的一级锥齿轮系统1107,一级锥齿轮系统1107的两个锥齿轮分别位于一级动力横轴1108和二级动力竖轴1109上,二级动力竖轴1109端部包含二级锥齿轮系统1110,二级锥齿轮系统1110的动力能够通过锥齿轮传递给弹射动力轴1111,弹射动力轴1111的动力能够传递给推进齿轮1112所在的轴,推进齿轮1112啮合无人机蒙皮上布置的齿条1113;一级锥齿轮系统1107和二级锥齿轮系统1110能够实现动力转向和多向传递使得无人机两侧的齿条被同时推动。本处的技术方案所起到的实质的技术效果及其实现过程为如下:该方案参考图24。可以肩膀扛着发射。
64.实施例四十一:作为进一步的可改进方案或者并列方案或可选择的独立方案,蜂群武器发射系统,其特征在于,发射车包含发射部分支架1116,发射部分支架包含一个以上的下位发射筒1114,一个以上的下位发射筒1114并列布置,在发射部分支架1116中布置有发射定位系统,发射定位系统包含电机及其加速机1101,电机及其加速机1101的动力输出轴1102的动力输出齿轮1103啮合一个以上的齿轮,一个以上的齿轮分别为离合器动力输入齿轮1104和中转转向齿轮1120,离合器动力输入齿轮1104连接的轴通入发射离合器1105,发射离合器1105的动力输出轴上为下位动力齿轮1106,下位动力齿轮1106动力连接着一级动力横轴1108上的一级锥齿轮系统1107,一级锥齿轮系统1107的两个锥齿轮分别位于一级动力横轴1108和二级动力竖轴1109上,二级动力竖轴1109端部包含二级锥齿轮系统1110,二级锥齿轮系统1110的动力能够通过锥齿轮传递给弹射动力轴1111,弹射动力轴1111的动力能够传递给推进齿轮1112所在的轴,推进齿轮1112啮合武器装置蒙皮上布置的齿条1113;发射离合器1105能够控制动力是否接入;一级锥齿轮系统1107和二级锥齿轮系统1110能够实现动力转向和多向传递使得武器装置两侧的齿条被同时推动。
65.实施例四十二:作为进一步的可改进方案或者并列方案或可选择的独立方案,加速器可以被如下结构代替。一级锥齿轮系统1107和二级锥齿轮系统1110均为加速系统,即通过锥齿轮大小的变化,实现逐级加速,齿轮推动武器高速射出。
66.第六发明:一种共轴无人机控制方法;作为现有技术的舵机分为:纵向双余度电动舵机、横向双余度电动舵机、航向双余度电动舵机、总距双余度电动舵机、油门双余度电动舵机。
67.实施例四十三:作为进一步的可改进方案或者并列方案或可选择的独立方案,一种共轴无人机控制方法,其特征在于,该控制系统包含导航飞控计算机a和导航飞控计算机b,地面站能够和地面遥控、遥测收发射机通信连接,通过主遥控遥测通道和备份遥控遥测通道分别通信连接着导航飞控计算机a和导航飞控计算机b;地面遥控、遥测收发射机通信连接着遥控二,遥控二能够控制无人机的发动机、纵向双余度电动舵机、横向双余度电动舵机、航向双余度电动舵机、总距双余度电动舵机、油门双余度电动舵机进行控制进而操纵飞机形态;导航飞控计算机a和导航飞控计算机b能够获取油箱油量、发动机温度、润滑油压力、发动机转速、磁航向传感器的信号、无线电高度表的信号;姿态陀螺角速率陀螺通信连接着导航飞控计算机a和导航飞控计算机b能获取飞行器姿态;gps/ins组合能够通信连接着导航飞控计算机a和导航飞控计算机b;空气压力传感器通过大气数据计算机能够给导航飞控计算机a和导航飞控计算机b提供大气信息。
68.实施例四十四:作为进一步的可改进方案或者并列方案或可选择的独立方案,无人机发射步骤为:先进行系统自检,自检不通过就放弃发射,并提示进行故障警报进一步进行故障排除;自检通过就进行发动机预热,预热后进行动力启动,动力启动后进行发射前状态确认,发射前状态确认后弹出飞行。
69.实施例四十五:作为进一步的可改进方案或者并列方案或可选择的独立方案,弹出飞行的过程中,无人机先弹出,弹出后上下旋翼展开,机翼进入限位区域后进行持续飞行。
70.实施例四十六:作为进一步的可改进方案或者并列方案或可选择的独立方案,弹出飞行的过程中,无人机起飞的时候采用如下任意一种模式起飞:一体化齿条发射车起飞:一级锥齿轮系统1107和二级锥齿轮系统1110能够实现动力转向和多向传递使得无人机两侧的齿条被同时推动;根据离合器的控制逐渐进行发射;单兵发射助力无人机起飞:人携带着,一级锥齿轮系统1107和二级锥齿轮系统1110能够实现动力转向和多向传递使得无人机两侧的齿条被同时推动,进行单筒发射;单机喷射发射起飞:在支撑腿的底部提供了具体的喷射结构,进一步能够实现螺旋桨提供动力的同时,能够让无人机进行喷射起飞助力;燃料容器701中的燃料被点火,因此整体形成朝上的喷射力,进一步带动无人机本体朝上相对运动,当无人机本体上升到目的高度的时候,螺旋桨启动,进而实现快速起飞;支架旋转起飞:下转动集团221包含的桨叶210撑地,下转动集团221包含的桨叶210的端部包含起飞底嵌入滚珠1003,起飞底嵌入滚珠1003嵌入或者安装在桨叶的端部,起飞底嵌入滚珠1003用于下螺旋桨起飞的时候相对地面转动辅助起飞降低和地面的摩擦力;底部护罩801包含尖刺结构,下转动集团包含的桨叶作为支撑腿的时候该尖顶在起飞的时候辅助插在地上用于无人机的起飞辅助定位;
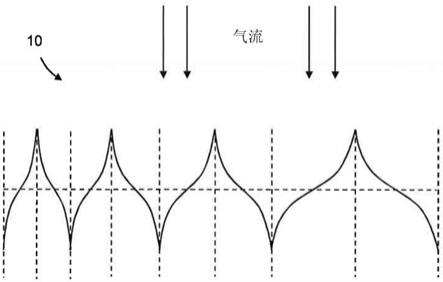
支架起飞:支撑腿5支撑地面,启动进行起飞;气流喷射起飞:蜂群无人机发射车采用气流进行喷射发射,空中开机。
71.实施例四十七:作为进一步的可改进方案或者并列方案或可选择的独立方案,无人机起飞后在空中还包含姿态调整的步骤:预测到障碍物飞来或者是导弹飞来的时候;导航飞控计算机a和导航飞控计算机b进行模拟,按照飞控系统的舵机调整能够多开的,进行避障操作;当飞控系统的舵机调整无法避开的时候;紧急开启多个燃料容器701中的任意一个,进而能够快速让无人机在空中实现位置调整;实现大推力空中位置瞬移,实现紧急避障。
72.实施例四十八:作为进一步的可改进方案或者并列方案或可选择的独立方案,无人机支架上布置有摄像机,因此能够获取周边以及下方的图像;无人机通信连接卫星以及附近高处的辅助摄像头的信号获取图形。
73.实施例四十九:作为进一步的可改进方案或者并列方案或可选择的独立方案,还包含无人机回收降落的步骤,降落地点的选择:通过预设的gps信息进行定点降落或者通过图像判断地质相对松软的位置进行降落;判断方式是通过图像判断地面非石头或者混凝土地面即可;当无人机落地的时候,间歇性启动多个燃料容器701中的任意一个,进而能够快速让无人机速度降低,进而实现缓着陆;底部护罩801包含尖刺结构,尖刺结构能够插入地下;底部冲口管702或者支撑腿5的端部包含支撑脚尖刺901,支撑脚尖刺901能插入地下;用于落地的时候插入地下进行无人机回收;底部护罩801包含尖刺结构,尖刺结构能够插入地下;用于落地的时候插入地下进行无人机回收;降落后通信报告gps或者北斗的位置,提示地面进行回收。
74.实施例五十:作为进一步的可改进方案或者并列方案或可选择的独立方案,还包含视觉控制逻辑的步骤,视觉控制逻辑是通过卫星的图像或者是摄像机获取到的图像进行分析,当判断出障碍物或者是飞来物的时候,视觉测距、进行紧急避障、追踪目标、和目标打击。
75.实施例五十一:作为进一步的可改进方案或者并列方案或可选择的独立方案,空心的叶片即桨叶210内部布置有一些碰撞爆炸物,当作为武器的时候,撞击目标物爆炸;碰撞爆炸物和高速叶片,对目标物进行损坏。
76.实施例五十二:作为进一步的可改进方案或者并列方案或可选择的独立方案,当高速叶片撞击到目标物的时候,叶片断开,高速的叶片能作为弹片进行独立飞行打击。该实施例为实施例五十一的进一步改进。
77.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本领域的技术人员应该了解本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。