1.本发明属于电力电子领域,具体涉及一种虚拟同步机的自适应控制方法。
背景技术:
2.随着经济技术的发展和人们生活水平的提高,电能已经广泛应用于人们的生产和生活当中,给人们的生产和生活带来了无尽的便利。因此,保障电能的稳定可靠供应,就成为了电力系统最重要的任务之一。
3.而随着新能源的增加,大量的可再生能源通过并网逆变器组成分布式电源,并接入电网;然而,这些电子设备中的大多数都是由数字电路控制的,瞬态响应速度快,而且没有惯性,同时还不参与电网的调频和电压调节,不能为电网提供电力支持,难以满足电网的要求。
4.因此,有关学者提出了下垂控制方案:在微电网应用中,下垂控制分别通过p/f下垂控制和q/v下垂控制获得稳定的频率和电压,并且已经表明下垂系数和辅助下垂控制环的优化有助于提高系统稳定性。但是,具有下垂控制的dg仍然没有对电力系统的惯性支持。为了模拟同步发电机的阻尼和惯性,有学者提出了虚拟同步机的控制方法。
5.如图1所示为现有的含储能端口的t型三电平逆变系统。系统整体包含三大部分:储能端口(图中的储能点出端)、dc/ac变换器和并网端口(图中的交流电网端)。在dc/ac变换器中,储能端口采用级联buck
‑
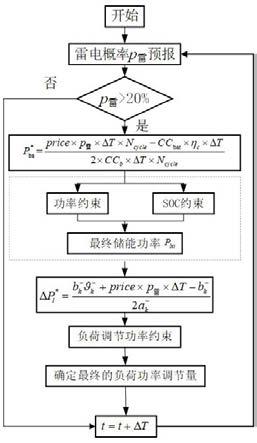
boost变换器,并网端口采用t型三电平变换器。t型三电平逆变器具有器件数目少、损耗低、输出波形好、效率高的优点,在储能系统中运用能够显著提高整个系统的效率。图2则为图1中dc/ac变换器的整体控制流程示意图,图中采用了虚拟同步机算法进行控制。
6.但是,现有的虚拟同步机的控制方法存在虚拟惯量不连续的问题,而基于乒乓控制的虚拟同步机容易因微小频率波动调整参数而引起系振荡,导致系统稳定性较差。
技术实现要素:
7.本发明的目的在于提供一种可靠性高、实用性好而且效果较好的虚拟同步机的自适应控制方法。
8.本发明提供的这种虚拟同步机的自适应控制方法,包括如下步骤:
9.s1.实时获取电网侧的运行参数;
10.s2.根据步骤s1获取的运行参数,计算虚拟同步机的虚拟惯量调整量;
11.s3.根据步骤s1获取的运行参数,计算虚拟同步机的阻尼系数调整量;
12.s4.根据步骤s1获取的运行参数,进行实时下垂控制;
13.s5.根据步骤s2~s4的计算结果,对虚拟同步机进行自适应控制。
14.步骤s2所述的根据步骤s1获取的运行参数,计算虚拟同步机的虚拟惯量调整量,具体为采用如下算式计算虚拟同步机的虚拟惯量调整量j
vsg
:
[0015][0016]
式中j0为初始虚拟惯量;k1为设定的大于0的常数;x为中间值,且ω为同步发电机的转子角速度;ω0为额定角速度;δω为同步发电机的转子角速度的变化值;k2为设定的大于0且小于1的常数。
[0017]
步骤s3所述的根据步骤s1获取的运行参数,计算虚拟同步机的阻尼系数调整量,具体为采用如下算式计算虚拟同步机的阻尼系数调整量d
vsg
:
[0018][0019]
式中d0为初始阻尼系数;k2为设定的大于0且小于1的常数;x为中间值,且ω为同步发电机的转子角速度;ω0为额定角速度;δω为同步发电机的转子角速度的变化值;k1为设定的大于0的常数。
[0020]
步骤s4所述的根据步骤s1获取的运行参数,进行实时下垂控制,具体为采用如下算式计算下垂控制系数k
vsg
:
[0021][0022]
式中k
vsg
为下垂控制系数;k0为vsg下垂系数初始值;k1为设定的大于0的常数;k2为设定的大于0且小于1的常数;x为中间值,且ω为同步发电机的转子角速度;ω0为额定角速度;δω为同步发电机的转子角速度的变化值。
[0023]
步骤s5所述的根据步骤s2~s4的计算结果,对虚拟同步机进行自适应控制,具体为采用如下步骤进行控制:
[0024]
a.采用如下公式计算虚拟同步机输出的有功功率参考值的修正量δp
vsg
:
[0025]
δp
vsg
=δp δp1[0026]
式中δp为第一额外能量,且d
vsg
为步骤s3
得到的虚拟同步机的阻尼系数调整量,ω为同步发电机的转子角速度,ω
ref
为额定的转子角速度,j
vsg
为步骤s2得到的虚拟同步机的虚拟惯量调整量;δp1为第二额外能量,且k
droop
为直流侧电压下垂系数,v
dc
为直流输电系统的输出电压实时值,v
dc
‑
ref
为直流电源额定值,v
ω
为额定电压修改指令值,且v
ω
=k
vsg
δω,k
vsg
为步骤s4得到的下垂控制系数,δω为同步发电机的转子角速度的变化值;
[0027]
b.采用如下公式计算虚拟同步机输出的无功功率参考值的修正量δq
vsg
:
[0028]
δq
vsg
=(v
ac
‑
v
ac
‑
ref
)k
ac
[0029]
式中v
ac
为电网侧的交流电压值实时值;v
ac
‑
ref
为电网侧的交流电压值参考值;k
ac
为交流电压下垂系数。
[0030]
本发明提供的这种虚拟同步机的自适应控制方法,其中的下垂控制系数、虚拟惯量和阻尼系数均采用分段自适应函数给出,因此相比于传统的虚拟同步发电机控制方法,本发明方法既克服了原本固定不变的虚拟同步机惯量和下垂控制系数的问题,也避免了因小的瞬时频率波动调整参数引起大的系统振荡,可以显著改善系统振荡问题,提高系统的稳定性,而且可靠性高、实用性好而且效果较好。
附图说明
[0031]
图1为现有技术的含储能端口的t型三电平逆变系统结构示意图。
[0032]
图2为现有技术的dc/ac变换器的整体控制流程示意图。
[0033]
图3为本发明方法的方法流程示意图。
[0034]
图4为本发明方法的控制框图。
[0035]
图5为本发明方法的角速度变化阶段示意图。
具体实施方式
[0036]
如图3所示为本发明方法的方法流程示意图:本发明提供的这种虚拟同步机的自适应控制方法,包括如下步骤:
[0037]
s1.实时获取电网侧的运行参数;
[0038]
s2.根据步骤s1获取的运行参数,计算虚拟同步机的虚拟惯量调整量;具体为采用如下算式计算虚拟同步机的虚拟惯量调整量j
vsg
:
[0039][0040]
式中j0为初始虚拟惯量;k1为设定的大于0的常数;x为中间值,且ω为同步发电机的转子角速度;ω0为额定角速度;δω为同步发电机的转子角速度的变化值;k2为设定的大于0且小于1的常数;
[0041]
s3.根据步骤s1获取的运行参数,计算虚拟同步机的阻尼系数调整量;具体为采用
如下算式计算虚拟同步机的阻尼系数调整量d
vsg
:
[0042][0043]
式中d0为初始阻尼系数;k2为设定的大于0且小于1的常数;x为中间值,且ω为同步发电机的转子角速度;ω0为额定角速度;δω为同步发电机的转子角速度的变化值;k1为设定的大于0的常数;
[0044]
s4.根据步骤s1获取的运行参数,进行实时下垂控制;具体为采用如下算式计算下垂控制系数k
vsg
:
[0045][0046]
式中k
vsg
为vsg下垂控制系数;k0为vsg下垂系数初始值;k1为设定的大于0的常数;k2为设定的大于0且小于1的常数;x为中间值,且ω为同步发电机的转子角速度;ω0为额定角速度;δω为同步发电机的转子角速度的变化值;
[0047]
s5.根据步骤s2~s4的计算结果,对虚拟同步机进行自适应控制;具体为采用如下步骤进行控制:
[0048]
a.采用如下公式计算虚拟同步机输出的有功功率参考值的修正量δp
vsg
:
[0049]
δp
vsg
=δp δp1[0050]
式中δp为第一额外能量,且d
vsg
为步骤s3得到的虚拟同步机的阻尼系数调整量,ω为同步发电机的转子角速度,ω
ref
为额定的转子角速度,j
vsg
为步骤s2得到的虚拟同步机的虚拟惯量调整量;δp1为第二额外能量,且k
droop
为直流侧电压下垂系数,v
dc
为直流输电系统的输出电压实时值,v
dc
‑
ref
为直流电源额定值,v
ω
为额定电压修改指令值,且v
ω
=k
vsg
δω,k
vsg
为步骤s4得到的下垂控制系数,δω为同步发电机的转子角速度的变化值;
[0051]
b.采用如下公式计算虚拟同步机输出的无功功率参考值的修正量δq
vsg
:
[0052]
δq
vsg
=(v
ac
‑
v
ac
‑
ref
)k
ac
[0053]
式中v
ac
为电网侧的交流电压值实时值;v
ac
‑
ref
为电网侧的交流电压值参考值;k
ac
为交流电压下垂系数。
[0054]
以上算法的详细推导过程如下:
[0055]
同步发电机的转子运动方程:
[0056][0057]
式中是机械功率,是电磁功率,j是同步机的转子运动惯量,ω是转子的角速度;
[0058]
在vsg(虚拟同步机)所在的系统,t型三电平变换器直流侧电容电压也存在相应的动态方程表征系统输入功率与输出功率的关系:
[0059][0060]
式中p
in
是直流储能设备或者直流电源流入直流输电系统的功率,p
out
是直流输电系统通过变换器传到交流电网的功率,c指的是直流输电系统并联的电容,v
dc
指的是这个电容上面的直流电压;
[0061]
将转子运动方程应用于虚拟同步机中,加入虚拟惯量并且突出转速变化率和转速偏移量对功率的影响;公式改写如下:
[0062][0063]
式中d为虚拟阻尼系数,j为虚拟同步机转子惯量;
[0064]
当输入功率不等于输出功率时,功率平衡就会被打破。此时,转子将改变其旋转速度。通过这种方式,转子可以吸收或释放额外的能量来维持能量平衡。所提出控制策略中,额外的能量采用如下式表示:
[0065][0066]
当频率偏差大于δω的时候,根据图5所示,分析了4种情况。该图是一个纵坐标为角速度,横坐标为时间的坐标系,ω
ref
是额定的转子角速度,ω是实际动态角速度。用数字来表示了交流侧电网的四个阶段,从图上可以看到,第一个阶段:角速度大于额定值,并且两者的差值在增加。第二个阶段:角速度依然大于额定值,但是两者的差值在减小。第三个阶段:角速度小于额定值,但是两者的差值继续增大。第四个阶段,角速度小于额定值,但是两者的差值在减小。
[0067]
本发明的目标就是希望能够更快地消除交流网络的频率偏差并使它稳定在额定频率附近。当虚拟惯量比较大的时候,交流电网频率偏离额定值速度会减小,回到额定值的速度会增大,而当虚拟惯量比较小的时候,交流电网频率偏离额定值的速度会增大而回到额定值的速度将会减小。因此,希望在第一阶段和第三阶段,δω和dω/dt同号的时候,虚拟同步惯量能增大,在第二阶段和第四阶段,δω和dω/dt异号的时候,虚拟同步惯量可以减小。在这个条件下,本发明提出来了一种自适应虚拟同步机控制策略,它能够根据交流电网频率与额定频率的偏差与频率变化的方向,自适应地调整虚拟惯量。基于分段函数的虚拟同步机控制系统整体框图如图4所示。
[0068][0069]
x是中间值。当它为正的时候,说明δω和dω/dt是同号的,当它为负的时候,说明δω和dω/dt是异号的。可以根据交流电网的频率实时控制下垂控制。虚拟惯量调整的分段函数的公式如下:
[0070][0071][0072]
式中j0是初始虚拟惯量;
[0073]
将上述公式带入δp的计算公式,得到:
[0074][0075]
下垂控制系数也能够随着交流电网的频率变化自适应地进行调整,下式为下垂系数的公式:
[0076][0077]
v
ω
=k
vsg
δω
[0078][0079]
有功功率参考值的修正量,其特征为:
[0080]
δp
vsg
=δp δp1[0081]
自适应虚拟同步机产生了δp
vsg
作为有功功率参考值的修改量,与参考值和实际有功功率值进行加减运算后,产生的功率偏差。功率偏差值通过了比例积分控制器后,产生了d轴的电流参考值,这个值再与实际的实时电流的d轴分量相减得到电流差值,作为d轴电压参考值。然后d轴的电压参考值再与网侧电压的d轴分量相加,再减去i
q
ω0l来解耦,经过解耦后得到d轴电压值记做m
d
。在q轴分量这一边,同样地过程,将网侧交流电压值与网侧交流电压参考值的差值通过k
ac
控制器后,得到无功功率修改量δq
vsg
。最后得到了q轴电压值记做m
q
。d轴的m
d
和和q轴的m
q
经过dq
‑
abc变换后,生成了控制pwm的指令m
a
、m
b
、m
c
。将产生的调制波与三角载波进行比较可获得pwm信号,进而控制t型三电平逆变器工作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。