1.本发明属于计算机视觉技术领域,特别涉及一种苹果智能无损分 拣的方法。
背景技术:
2.目前,中小型网络直销的个体农户常常使用人工分拣方法进行苹 果分拣装盒。然而对于分拣工序主要是从收集苹果的容器中逐个挑出 来分拣,人工需要仔细观察苹果的果面光洁度,并且借助各种型号的 分级板对苹果大小进行分级。在识别苹果表面的果皮损伤中,农户大 都采用人眼分拣的方式,但是苹果分级十分严格,例如优质果要求红 色着色面大于80%且斑点个数不超过5个,果锈面积不得大于1平 方厘米,人眼无法对这样的缺陷精确度量;分拣工作完成后,农户还 需要人工装盒。这一系列由操作人员手工完成分拣装盒工作,存在耗 费大量的人力物力、且效率低下,主观误差大、容易疲劳出错的缺点。 现有分拣设备大多都只能单独针对苹果单项特征进行分级,并不能准 确地反映苹果的综合品质,无法满足如今网购消费者对苹果品质的需 求。
技术实现要素:
3.为了克服上述现有技术的不足,本发明的目的在于提供一种苹果 智能无损分拣的方法,通过计算机代替人力对传送带上的苹果进行自 动识别、分级、拣选装盒。苹果在传送带上的摆放无位置要求,多个 苹果可同时进行分拣。不但可实现自动、无损的拣选,而且实时性和 有效性均得到大幅度提升。
4.为了实现上述目的,本发明采用的技术方案是:
5.提供一种苹果智能无损分拣的方法,包括以下步骤:
6.步骤一,使用摄像头采集暗箱内苹果表面图像;
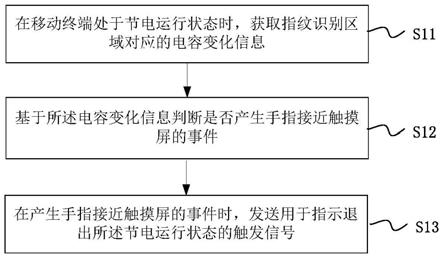
7.步骤二,通过设定传送带上的区域为感兴趣区域regionofinterest (roi)将传送带皮带以外的背景去除掉,方便后面苹果图像的进一 步处理。
8.步骤三,对苹果图像进行预处理,包括利用加权平均值法对苹果 图像灰度化、使用低通频域滤波器对图像去噪以及最佳全局阈值分割 法对粘连苹果图像分割,从而得到单个苹果图像;
9.步骤四,对处理后的单个苹果图像,提取出单个苹果连通域,利 用opencv图像处理库中的函数minarearect,提取苹果图像轮廓区域 的最小外接矩形,从而得到苹果的像素长宽即果径特征。
10.步骤五,采用基于最小外接圆法的果梗/花萼法的果形特征提取。
11.步骤六,采用基于hsv颜色空间的果面着色度特征分析。
12.步骤七,融合苹果果径、果形与颜色特征,将融合后的特征向量 输入到svm分类器中进行分类识别。
13.步骤八,对果径、果形以及着色度合格的苹果采用深度卷积神经 网络yolov5检测算法进行果面缺陷检测,机械臂抓取果面合格苹 果对其底部进行二次缺陷检测,合格苹果
规则装盒,不合格苹果放回 传送带进入残次果流程。
14.步骤九,采用基于rrt算法对双机械臂避障路径进行规划,抓 取分类后苹果按级进行装盒。
15.步骤十,利用pyqt5建立苹果质量参考平台对生产状况进行查 询,以及数据的存储。
16.所述的步骤二中,通过固定相机,使其在流水线上方距离保持一 致,设定感兴趣区域regionofinterest(roi)将流水线皮带以外的场 景去除掉,方便后面苹果图像的进一步处理。
17.所述的步骤三中,采用加权平均值法对图像的b、g、r三个通 道值赋予不同的权重,并进行加权求和,得到苹果图像的灰度图。可 减少图像信息量,提高计算效率,减少处理时间。加权平均值法的计 算公式如下:
18.gray=w1*b w2*g w3*r
19.其中,b、g和r分别为彩色图像的蓝色、绿色和红色通道, 对应的权重分别为w1=0.114,w2=0.587,w3=0.299。
20.接下来使用低通频域滤波器对苹果图像中的噪点进行去除,并 增强和背景部分的区分度。理想低通滤波器模板计算公式如下:
[0021][0022]
其中,d0为截止频率,即通带半径,d(u,v)为频域中一点(u,v)到 频域矩形中心点的距离(欧式距离),m和n表示频谱图像的宽和 高,(m/2,n/2)为频谱中心。
[0023]
最后对预处理后的苹果图像使用最佳全局阈值分割(otsu)的处 理方法,图像得到具体的苹果。对具体苹果图像进行连通域分析,判 断每个连通区域的面积是否大于单个苹果连通区域的面积,如果大于, 将该连通域判断为有粘连情况。通过凹点检测算法找到粘连联通区域 轮廓上的凹点,并计算每个凹点与其曲率方向上某个点的连线。计算 连线间的夹角,在夹角为钝角的前提下,找到与该凹点距离最近的凹 点,即为一对匹配凹点,用直线连接凹点对,即完成粘连苹果的分割。
[0024]
所述步骤五中,根据苹果分级标准可知,苹果的果形特征一般用 苹果的最大横径与纵径之比来描述。当果形指数越接近1的时候说明 苹果的果形越好,越远离1的时候说明果形越不够端正。其中最大横 径指的是苹果最大横截面直径,最大纵径为过果梗且与最大横径垂直 的长度。根据研究可知,苹果的最大横径可以用果径r描述,苹果的 最大纵径d可以近似用果梗与花萼之间的距离来描述,如下式所示。
[0025][0026]
式中:x
gg
和y
gg
分别为果梗位置的横、纵坐标,x
he
和y
he
分别为花萼 位置的横、纵坐标。
[0027]
其苹果果形特征k可用下式表示。
[0028][0029]
所述的步骤六中,在实验光源一定的情况下,s和v通道图像是 固定的,因此只需
要对h通道图像进行研究。首先将rgb图像转换 成hsv图像,如下式所示。
[0030][0031][0032]
v=max
[0033]
式中:r、g、b分别代表r、g、b三通道的像素值,max代表三 通道中的最大值,min代表三通道中的最小值,h、s、v分别代表由rgb 转换到hsv空间后的三通道的值。将分割后的苹果rgb图像转化成 hsv图像后,接下来提取出h通道的图像。
[0034]
所述步骤八中,对优质果采用卷积神经网络进行果面缺陷检测, 机械臂抓取果面合格苹果对其底部进行二次缺陷检测,合格苹果规则 装盒,不合格苹果放回传送带进入残次果流程。由于机械臂抓起苹果 对底部进行二次缺陷检测时,背景复杂,且容易受到光线因素的干扰, 为保证识别的精度以及速度使用卷积神经网络对苹果底部状况进行 检测,具体过程包括:
[0035]
1)对苹果底部进行拍照,采集4000张苹果图像作为样本数据。 对优质及疤痕缺陷的苹果分别采集了2000张,共包含4000张图片, 苹果图像的大小为640*480,并设定为两类分别为scar_apple和prefect_apple。采用labelimage对优质果与及疤痕缺陷的坏果进行标 注,框出每一个苹果在图像中的具体位置,并设定每个苹果所属的类 别。labelimage会为数据集的每一个图像生成对应的.xml文件,用来 记录苹果图像的位置、路径、标注的位置和类别。
[0036]
2)将.xml的文件转换为label文件,label文件内含对应图片标 注内容的类别以及标注框的顶点坐标。以及训练集测试集的图片路径。 然后在pytorch版本中对.yaml配置文件进行修改,在设置nc的大小 为2,以及class修改为自定义类名。
[0037]
3)下载yolov5s的预训练模型文件到权重文件夹中,修改 models文件夹下的yolov5m.yaml下的类别数为2,在train.py中主 函数的命令行参数中设置参数路径以及总训练步数,运行train.py对 模型进行训练,观察loss函数,当其下降到0.4作业停止训练,在run 文件夹下找最后一次迭代过程中的best.pt。
[0038]
所述步骤十,采用基于rrt算法对双机械臂避障路径进行规划, 抓取分类后苹果按级进行装盒。具体过程包括:
[0039]
1)将两条机械臂一条作为主臂,一条作为从臂,建立工作空间 中障碍物的地图环境,其次,利用rrt路径规划算法,在障碍环境 中规划出主臂的一条从起始位置到目标位置
的无碰的可行路径,再其 次,将主臂作为动态障碍,对从臂也规划出一条从起始位置到目标位 置的无碰的可行路径。最终,得出主臂和从臂的无碰路径,算法结束。
[0040]
2)在双机械臂的运动路径规划时,首先以障碍物空间中的机械 臂末端执行器的起始位姿节点作为算法的初始的根位姿节点,在工作 空间中进行随机采样,生成随机节点,双机械臂应用中的随机节点为 一组6个关节的关节角度。其次,比较初始的根位姿节点与生成的随 机节点,选择改变最小的那个关节,按照随机节点的方向,旋转一个 步长的度数,得到初始的根位姿节点的子节点。然后,接着随机采样 生成随机节点,通过建立的罚函数来比较,初始的根位姿和它的子节 点与随机生成的节点之间的关系,也就是对生成的随机节点进行评估。 最后,以此类推,逐渐增加叶位姿节点,生成一个随机扩展树。当随 机树中的叶位姿节点中包含机械臂目标位姿区域时,便可在随机树中 找到一条从起始位姿到目标位姿的路径。从而当苹果到达分拣区域时, 双机械臂协同工作将苹果分拣到对应等级的箱子中,实现自动分拣装 盒。
[0041]
本发明的有益效果:
[0042]
本发明使用机器视觉技术对苹果进行分拣装盒,通过图像处理算 法,提取苹果的果径、果形、着色度和缺陷特征,利用分类算法将苹 果分级并记录苹果的位置信息。为了提高苹果分拣的效率,采用双机 械臂协同分拣的方式对苹果进行分拣。当苹果到达分拣区域时,双机 械臂协同工作将苹果分拣到对应等级的箱子中,同时将分拣信息存储 在数据库中以供工作人员进行质量评估。本发明可提高苹果分拣的质 量和效率、降低生产成本以及避免二次损伤等问题。将机器视觉技术 与专用机器人技术结合起来,实现智能化的苹果分拣。可节约相当大 的人力成本,提高分拣效率,在苹果后续的分销出口等环节保证苹果 的质量,加强中国苹果的竞争力,对于农业智能化生产方面具有一定 的指导意义。
附图说明
[0043]
图1是本发明实施例提供的分拣系统整体功能示意框图。
[0044]
图2是本发明实施例提供的分拣系统整体功能结构框图。
[0045]
图3是本发明实施例提供的粘连苹果判别和分离流程图。
[0046]
图4是本发明实施例提供的双臂协同算法流程图。
具体实施方式
[0047]
下面结合附图对本发明作进一步详细说明。
[0048]
针对现如今对苹果等级的要求越来越严格,传统的人工分拣方法 存在着效率低下、成本高、主观误差大和二次损伤等问题。本发明使 用机器视觉技术对苹果进行分拣装盒,通过图像处理算法,提取苹果 的果径、果形、着色度和缺陷特征,利用分类算法将苹果分级并记录 苹果的位置信息。为了提高苹果分拣的效率,采用双机械臂协同分拣 的方式对苹果进行分拣。当苹果到达分拣区域时,双机械臂协同工作 将苹果分拣到对应等级的箱子中,同时将分拣信息存储在数据库中以 供工作人员进行质量评估。提高苹果了分拣的质量和效率、降低生产 成本。
[0049]
下面结合附图对本发明的应用原理作进一步的说明。
[0050]
参见图1,本发明所述苹果分拣系统是用来进行苹果图像检测、 分级,机械臂根据
检测结果进行分拣装盒,以及人机交互模块实时显 示苹果分拣情况。可分为苹果图像分级与定位模块、苹果分拣模块和 人机交互模块三大模块。
[0051]
1)苹果图像分级与定位模块主要由图像预处理、图像分割、特 征提取、苹果分级和苹果定位五部分组成。各部分功能如下:
[0052]
①
图像预处理:对苹果图像进行灰度化、图像去噪;
[0053]
②
图像分割:将苹果分别从上侧面以及下侧面图像中分割出来;
[0054]
③
特征提取:提取苹果的果径、果形、着色度和缺陷特征,用于 苹果的分级;
[0055]
④
苹果分级:利用苹果样本对分级模型进行训练,实现苹果的等 级划分;
[0056]
⑤
苹果定位:将图像坐标系与世界坐标系进行转换,将苹果图像 位置与实际位置关联起来,以供后续苹果的跟踪和分拣使用。
[0057]
2)苹果分拣模块包括苹果跟踪子模块和双臂协同分拣子模块。 各子模块对应功能如下:
[0058]
①
苹果跟踪子模块:对经过上侧面图像处理后的每个苹果的位置 进行更新与记录,以供机械臂抓取;
[0059]
②
双臂协同分拣子模块:对经过苹果上侧面图像处理已经得出分 级结果的苹果进行实时跟踪,当检测到苹果到达分拣区域时根据双臂 协同分拣算法将苹果分拣到对应等级的箱子中;对于经过苹果上侧面 图像处理未得出分级结果的苹果,当到达苹果分拣区域时,由机械臂 将苹果抓取停顿0.5s,等待苹果下侧面图像处理分级结果,然后根据 分级结果将苹果分拣到对应等级的箱子中。
[0060]
3)人机交互平台主要是为了操作人员可以更好的了解当前系统 运行的状态,并且根据苹果分级的质量数据评估一批次的苹果质量好 坏。人机交互模块包括登录界面、通讯设置界面、生产状况界面和数 据查询界面四个部分,各个部分功能如下:
[0061]
①
登录界面:用于登录苹果分拣平台主界面;
[0062]
②
通讯设置界面:用于设置整个分拣平台的通讯功能,主要对机 械臂的通讯功能进行设置,包括串口号和波特率的设置;
[0063]
③
生产状况界面:实时显示暗箱内部图像处理状况以及外部图像 处理状况,并返回苹果的等级信息及位置坐标;
[0064]
④
数据查询界面:可以查询数据库中,每一批次各级苹果的数量, 以便于工作人员进查看和分析。
[0065]
如图2所示,本发明在结构上包括传送带装置1,工业摄像机2, pc机3,双机械臂4,外部摄像头和闪光灯5。传送带装置1上装有 暗箱,暗箱内部在距传送带40cm高处装有工业摄像机2,双机械臂 4固定在传送带1的两侧,外部摄像头与闪光灯5固定在传送带1的 末尾。
[0066]
本发明的工作流程如下:首先将苹果以任意姿态放置在传送带上, 苹果随着传送带运动,当苹果经过装有工业摄像机和补光设备的暗箱 后,摄像机定时采集传送带上的苹果上侧面图像,并且将采集到的苹 果图像由pc机进行图像处理,同时将实时分级结果和数据实时显示 在pc端上以供用户查看。为了保证分级的准确性,对未采集到的苹 果底部图像也进行采集与处理。故采用机械臂将苹果抓举起来,然后 由外部摄像头利用深度卷积神经网络对苹果底部状况进行检测,综合 两幅图像识别信息得到苹果的分级结果,最后利用
双机械臂根据分级 结果将苹果分拣到对应等级的箱子中,从而达到苹果智能分拣的目的。 本发明主要由像采集装置、传送装置、分拣装置和苹果分拣平台四部 分组成,各部分功能如下:
[0067]
(1)图像采集装置:由暗箱、led、两个ccd相机和闪光灯组 成,负责采集苹果图像,然后发送给pc机进行图像处理。暗箱和led 用于保证采集苹果图像时不受外界环境的干扰,保证光源的稳定,便 于内部ccd相机采集到高清且亮度一致的苹果图像。在外部增加一 个ccd相机,用来采集之前未被内部相机采集的下侧面苹果图像, 保证了苹果分级的准确性。由于外部环境复杂,光源较不稳定,因此 加上一个闪光灯,配合外部相机采集图像,保证外部图像采集的质量。
[0068]
(2)传送装置:由电机、开关、调速控制器以及传送带组成,负 责传送苹果。电机用于带动传送带运动;开关用于控制装置的开关; 调速控制器用于控制传送速度;传送带用于带动苹果进行运动。
[0069]
(3)分拣装置:由带有控制器的机械臂组成,用于辅助外部相 机进行图像采集以及将苹果分拣到对应的箱子中。
[0070]
(4)苹果分拣平台:由pc机组成,负责苹果的图像处理(苹果 分级和定位)以及机械臂的控制。pc机对采集到的苹果图像进行处 理,得到苹果的分级结果,实时更新苹果的位置信息。当苹果运动至 分拣区时,pc机苹果最新的位置信息发送给机械臂控制器,机械臂 将苹果抓举起来停顿0.5s,外部摄像头利用深度卷积神经网络对苹果 底部状况进行检测,综合两幅图像信息得出苹果的分级结果,最后机 械臂根据分级结果将苹果分拣到对应箱子中,同时在pc上实时显示 图像处理结果,并且对每一批次的苹果等级信息进行记录和保存,便 于用户查看与分析。
[0071]
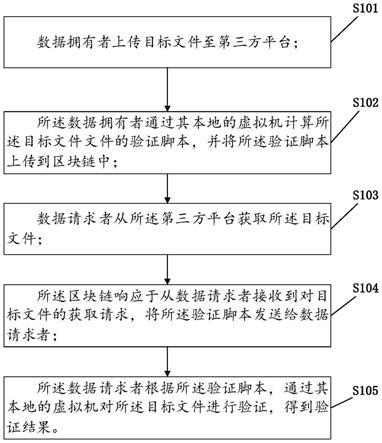
图3是本发明实施例提供的粘连苹果判别和分离流程图。基于凹 点匹配的粘连苹果的判别和分离流程下所示:
[0072]
1)首先对预处理后的苹果二值图像,进行连通域分析,判断每 个连通区域的面积是否大于单个苹果连通区域的面积,如果有, 将该连通域判断为有粘连情况。
[0073]
2)通过凹点检测算法找到粘连联通区域轮廓上的凹点。
[0074]
3)计算每个凹点与其曲率方向上某个点的连线ab
[0075]
4)凹点匹配原则:
[0076]
①
两个凹点按照3中方法计算a1b1与a2b2,a1b1与a2b2的夹角必 须为钝角。
[0077]
②
在
①
的前提下,找到与该凹点距离最近的凹点,即为一对匹配 凹点。
[0078]
5)用直线连接凹点对,完成粘连苹果的分割
[0079]
粘连苹果图像分离后,接下来就可以提取单个苹果,通过提取单 个苹果的最小外接矩形来分割出单个苹果图像,为后面对单个苹果的 特征提取和识别做准备。
[0080]
图4是本发明实施例提供的苹果图像分级与定位总体流程图。苹 果图像分级与定位算法的总体工作流程是:首先通过暗箱内的ccd 相机采集苹果上侧面图像,通过图像处理算法初步得出苹果等级信息, 判断苹果是否为等外果,若苹果为等外果,则直接输出苹果等级和位 置信息,若不是等外果,则进行苹果下侧面图像采集与处理,综合两 幅图像信息返回苹果的等级和位置信息。苹果图像分级与定位算法主 要包括以下几个步骤:
[0081]
1)苹果上侧面图像采集:获取苹果上侧面图像;
[0082]
2)预处理与图像分割:包括图像灰度化、滤波、背景分割以及 粘连图像分割;
[0083]
3)苹果上侧面图像特征提取:根据苹果上侧面图像提取苹果的 果径、果形、着色度和缺陷特征参数,用于苹果上侧面图像识别;
[0084]
4)苹果上侧面图像识别与定位:根据提取到的果径和缺陷特征 对苹果进行等级,并对每个苹果进行定位;
[0085]
5)苹果下侧面图像采集,使用深度卷积神经网络对苹果底部状 况进行检测与分级。
[0086]
6)记录苹果等级与位置信息:用于机械臂分拣苹果到对应等级 的箱子中。
[0087]
双机械臂协同按以下步骤进行:
[0088]
首先,将两条机械臂一条作为主臂,一条作为从臂,建立工作空 间中障碍物的地图环境,其次,利用所提出的改进的rrt路径规划 算法,在障碍环境中规划出主臂的一条从起始位置到目标位置的无碰 的可行路径,再其次,将主臂作为动态障碍,对从臂也规划出一条从 起始位置到目标位置的无碰的可行路径。最终,得出主臂和从臂的无 碰路径,算法结束。
[0089]
算法主要包括障碍物环境的建立模块、extendtreerobot函数(随 机扩展树模块)、碰撞检测方法模块以及寻找最终路径模块,其中随 机扩展树模块和碰撞检测方法模块是本算法的关键改进点,下面将着 重讲解随机扩展树模块。
[0090]
extendtreerobot函数,随机扩展树函数,也是rrt算法的核心 函数,被用来在空间中生成随机节点,从初始目标区域向周围邻接区 域进行不断的扩展以及记录扩展过程中所遍历过的较优的节点,当记 录的较优节点包含目标位置节点时,随机扩展树函数结束搜索,在双 机械臂的运动路径规划时:首先,以障碍物空间中的机械臂末端执行 器的起始位姿节点作为算法的初始的根位姿节点,在工作空间中进行 随机采样,生成随机节点,双机械臂应用中的随机节点为一组6个关 节的关节角度。其次,比较初始的根位姿节点与生成的随机节点,选 择改变最小的那个关节,按照随机节点的方向,旋转一个步长的度数, 得到初始的根位姿节点的子节点。然后,接着随机采样生成随机节点, 通过建立的罚函数来比较,初始的根位姿和它的子节点与随机生成的 节点之间的关系,也就是对生成的随机节点进行评估。最后,以此类 推,逐渐增加叶位姿节点,生成一个随机扩展树。当随机树中的叶位 姿节点中包含机械臂目标位姿区域时,便可在随机树中找到一条从起 始位姿到目标位姿的路径。从而当苹果到达分拣区域时,双机械臂协 同工作将苹果分拣到对应等级的箱子中,实现自动分拣装盒。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。