1.本发明属于光学测试和人工智能技术领域,涉及深度学习,特别是一种基于深度神经网络的单幅干涉图波前质量参数值读取方法。
背景技术:
2.干涉测量技术是现代精密测量的主要手段之一,它以光的波长为度量单位,具有高灵敏度和非接触的特点,在光学车间得到广泛应用。通过干涉仪获得的干涉图包含有被测波面的面形信息,对干涉图判读可以得到评估值如pv值、rms值,进而通过评估值的大小判断被测波面的优劣。传统干涉仪采用目视方法进行干涉图的人工判读,现代数字化干涉仪采用条纹跟踪法、傅里叶变换法、相移法等技术实现波面的定量测量。
3.人工判读法目前是光学车间干涉仪应用的最常用方法,检测人员根据干涉条纹的变形估计被检测波面误差,但其依赖检测人员的经验,不利于加工制造厂商工艺流程的标准化和客观化。条纹跟踪法和傅里叶变换法基于单幅干涉图获取波前信息,对振动不敏感,比较适合于光学车间检验,但条纹跟踪法数据处理速度较慢,傅里叶变换法对干涉图局部瑕疵较为敏感。相移法利用多张干涉图协同获取波前信息,是目前精度最高的干涉测量技术,但系统成本较高,限制了其广泛应用。
4.人工智能技术利用计算机资源,对已知的数据信息进行编码,利用统计理论对网络模型进行训练学习,所得模型能够在很多领域代替人工进行识别、检测等工作。作为其子类别,深度神经网络因其强大的并行计算能力在图像领域飞速发展。但由于干涉图图像特征的特殊性,目前没有利用人工智能技术实现干涉图波前质量参数值自动读取的技术。
技术实现要素:
5.为克服现有技术的不足,本发明提供了一种基于深度神经网络的单幅干涉图波前质量参数值读取方法。该方法利用计算机仿真生成干涉图作为训练数据集,利用训练数据集训练神经网络模型,使得训练好收敛的网络模型能够从单幅干涉图快速自动读取波前质量参数值。
6.本发明的技术方案如下:
7.一种基于深度神经网络的单幅干涉图波前质量参数读取方法,其特征在于包括以下步骤:
8.1)针对干涉图尺寸,设计干涉图处理深度神经网络,所述的干涉图处理深度神经网络包含1个输入层,多个卷积块,至少2个全连接层,和至少1个输出层;
9.2)利用计算机模拟生成理想无噪声干涉图并对其标注编码,作为理想训练集和理想标签集;
10.3)利用计算机模拟生成含噪声干涉图并对其标注编码,作为噪声训练集和噪声标签集;
11.4)利用理想训练集和理想标签集预先训练深度神经网络;
12.5)利用噪声训练集和噪声标签集再次训练深度神经网络;
13.6)将需要读取波前质量参数值的真实干涉图输入进训练好的深度神经网络,输出对应干涉图的波前质量参数值。
14.所述的基于深度神经网络的单幅干涉图波前质量参数读取方法,所述的波前质量参数包括pv值、rms值、zernike系数。
15.所述的基于深度神经网络的单幅干涉图波前质量参数读取方法,所述的卷积块的数量为4个及以上。
16.所述的基于深度神经网络的单幅干涉图波前质量参数读取方法,所述的卷积块包含至少2个卷积层。
17.所述的基于深度神经网络的单幅干涉图波前质量参数读取方法,所述的卷积块包含1个最大池化层。
18.所述的基于深度神经网络的单幅干涉图波前质量参数读取方法,所述的卷积层的卷积核大小为3
×
3。
19.与现有技术相比,本发明利用仿真干涉图完成神经网络的训练,操作简单。训练好的网络占用计算机资源小,对于一幅新的干涉图,无需任何先验知识及预处理,即可快速读取其对应波前质量参数值,具有良好的普适性。
附图说明
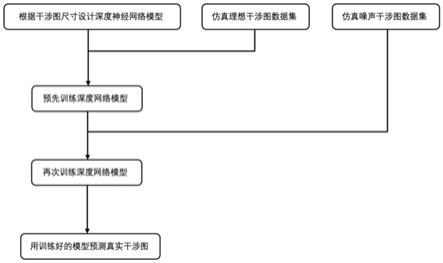
20.图1是本发明基于深度神经网络的单幅干涉图pv值读取方法的流程图;
21.图2是本发明实施例的深度神经网络流程图;
22.图3是本发明实施例的深度神经网络空间结构图;
23.图4是计算机模拟生成的理想干涉图;
24.图5是计算机模拟生成的包含噪声的干涉图;
25.图6是用于测试的实际干涉图。
具体实施方式
26.下面结合实施例和附图对本发明作进一步说明,但不应以此实施例限制本发明的保护范围。
27.以256
×
256像素的干涉图为例,如图1所示,基于深度神经网络的单幅干涉pv值读取方法包括以下步骤:
28.(1)针对干涉图尺寸,设计干涉图处理深度神经网络;
29.(2)利用计算机模拟生成理想无噪声干涉图并对其标注编码,作为理想训练集和理想标签集;
30.(3)利用计算机模拟生成含噪声干涉图并对其标注编码,作为噪声训练集和噪声标签集;
31.(4)利用理想训练集和理想标签集预先训练深度神经网络;
32.(5)利用噪声训练集和噪声标签集再次训练深度神经网络;
33.(6)将需要读取pv值的真实干涉图输入进训练好的深度神经网络,输出对应干涉图的pv值。
34.上述实施例步骤(1)中,如图2所示,深度神经网络包含1个输入层i,5个卷积块c1、c2、c3、c4、c5,两个全连接层f1、f2,1个输出层o。卷积块c1、c2、c3、c4由2个卷积层和1个最大池化层构成,卷积块c5由两个卷积层构成,其中卷积层的卷积核大小均为3
×
3。对应网络空间结构图如图3所示。干涉图经过神经网络的流程如下:
35.1)干涉图从输入层i输入网络,输入层尺寸为256
×
256
×
1;
36.2)在卷积块c1中经过2个卷积层和1个最大池化层,其中每个卷积层有64个卷积核,经卷积层后尺寸为256
×
256
×
64,池化层使尺寸减半为128
×
128
×
64;
37.3)在卷积块c2中经过2个卷积层和1个最大池化层,其中每个卷积层有128个卷积核,经卷积层后尺寸为128
×
128
×
128,池化层使尺寸减半为64
×
64
×
128;
38.4)在卷积块c3中经过2个卷积层和1个最大池化层,其中每个卷积层有256个卷积核,经卷积层后尺寸为64
×
64
×
256,池化层使尺寸减半为32
×
32
×
256;
39.5)在卷积块c4中经过2个卷积层和1个最大池化层,其中每个卷积层有512个卷积核,经卷积层后尺寸为32
×
32
×
512,池化层使尺寸减半为16
×
16
×
512;
40.6)在卷积块c5中经过2个卷积层,其中每个卷积层有64个卷积核,经卷积层后尺寸为16
×
16
×
512;
41.7)从c5输出,经过全连接层f1和f2,输出至输出层o。
42.所述步骤(2)中,理想训练集包括48000张理想无噪声干涉图,理想标签集包含48000个经编码的pv值,干涉图和经编码的pv值一一对应,均利用计算机模拟生成,生成的理想无噪声干涉图如图4所示。具体办法为:
43.1)利用泽尼克多项式随机生成相位图;
44.2)遍历相位图各个像素值找到最大值和最小值,两值做差取绝对值作为最大相位差,利用相位和光程的换算获得波前pv值;
45.3)对相位图各像素作余弦变换,添加直流量强度及振幅得到理想干涉图;
46.4)将理想干涉图整理成理想训练集,对应pv值编码为理想标签集。
47.本例所述步骤(3)中,噪声训练集包括48000张含噪声干涉图,噪声标签集包含48000个经编码的pv值,干涉图和经编码的pv值一一对应,均利用计算机模拟生成,生成的噪声干涉图如图5所示。具体办法为:
48.1)利用泽尼克多项式随机生成相位图;
49.2)遍历相位图各个像素值找到最大值和最小值,两值做差取绝对值作为最大相位差,利用相位和光程的换算获得波前pv值;
50.3)对相位图各像素作余弦变换,添加直流量强度及振幅得到理想干涉图;
51.4)在理想干涉图上按照一定信噪比添加噪声项如高斯噪声;
52.5)将噪声干涉图整理成噪声训练集,对应pv值编码为噪声标签集。
53.本例所述步骤(4)中,将上述理想训练集作为深度神经网络的输入,对应pv值作为输出,对神经网络进行预先训练55轮。所述神经网络的预先训练,以神经网络的实际输出和训练集对应pv值的均方根误差作为损失函数。学习速率、训练批大小(batchsize)的设置均根据网络优化的效果进行调整,以便得到最低的损失函数。
54.本例所述步骤(5)中,在步骤(4)预先训练过的模型基础上,将上述噪声训练集作为深度神经网络的输入,对应pv值作为输出,对神经网络进行再次训练100轮。所述神经网
络的再次训练,以神经网络的实际输出和训练集对应pv值的均方根误差作为损失函数,采用和步骤(4)相同的优化方法,训练批大小(batch size)与步骤(4)相同,学习速率缩小为步骤(4)的
55.本例所述步骤(6)中,将如图6所示的实际干涉图作为训练好的深度网络模型的输入,经过神经网络的计算后,输出实际干涉图所对应的pv值为0.1波长。
56.本实施例中,利用仿真干涉图完成神经网络的训练,操作简单。训练好的网络占用计算机资源小,对于一幅新的干涉图,无需任何先验知识及预处理,即可快速读取其对应pv值,具有良好的普适性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。