1.本发明涉及竖井掘进技术领域,特别涉及一种适用于竖井掘进中的十字桁架机具工作平台。
背景技术:
2.桥梁、边坡、高层建筑等建筑为保证安全性,在建设时需挖掘一定深度的桩基作为建筑物的承力基础。目前,桩基的成型主要有:旋挖机挖掘、人工挖掘、冲击成桩等。
3.机械成桩对环境的要求较高,设备体积大,采购成本高,对操作人员技术要求高,水源、电源、道路等都是制约机械成桩的因素,所以人工挖掘孔桩在目前还占有很大的比例。
4.人工挖掘孔桩有着对设备和环境配套要求低的特点,但是也存在易受到跌落、窒息、掩埋、机械伤害等危险的因素的制约,且存在开挖速度慢,成桩质量较机械开挖低等缺陷的影响。
5.为减小人员伤亡的因素,同时又能结合人工挖孔桩和机械挖掘的优点,研制一款自动化钻凿炮孔的设备势在必行。
6.由于孔桩属于竖井的一种,工作面处于地面以下,所有机具都悬挂于工作面上方工作,为了给机械创造一个稳固的工作平台,需要架设机具工作平台。本发明主要为钻机及其他相应工具提供一个稳固的安装基座和工作平台。
技术实现要素:
7.本发明要解决的技术问题是提供一种适用于竖井掘进中的十字桁架机具工作平台,该固定系统为钻机及其他相应工具提供一个稳固的安装基座和工作平台。
8.为了解决上述技术问题,本发明的方案为:
9.一种适用于竖井掘进中的十字桁架机具工作平台,包括设置在竖井井口的定位装置,及所述定位装置正下方配置的机具工作平台,所述定位装置上配置有激光传感器,所述机具工作平台上配置有与所述激光传感器对应的激光指示发生器,所述机具工作平台上铰接有设置吊装架及水平调节液压支撑杆,所述水平调节液压支撑杆与所述吊装架远离所述机具工作平台的一端铰接,所述吊装架上设置有吊钩,所述吊钩上配置有吊索,所述机具工作平台、激光传感器及水平调节液压支撑杆连通有控制主机。
10.所述定位装置为圆形孔桩井口定位装置及方形孔桩井口定位装置中的一种。
11.所述定位装置包括呈十字交叉结构设置的两根横梁,及设置在所述横梁四端的定位桩,所述激光传感器设置在两根所述横梁的交叉处。
12.所述机具工作平台为圆形机具工作平台及方形机具工作平台中的一种。
13.所述机具工作平台包括呈十字交叉结构设置的两根定位架主梁,及所述定位架主梁两端设置的液压支撑伸缩杆,所述激光指示发生器设置在两根所述定位架主梁的交叉处。
14.所述激光指示发生器设置在减震液体内,所述激光指示发生器底部设置有配重块。
15.所述吊索顶端连接有安装模块基座,所述定位装置设置在所述安装模块基座上。
16.所述控制主机控制连接有钻机。
17.与现有技术相比,本发明的有益效果为:
18.本技术为了保证钻机的工作平稳和钻孔的精确性,对工作平台的位置精度有较高的要求。工作平台稳定支撑时,通过激光传感器计算和感知平台所处孔间的相对位置,所得到的数据用于修正和调节钻机工作时的初始位置。同时为了延长工作平台的使用寿命,并能在钻机冲击力的反作用力下不会发生大的位移,必须确保机具工作平台的四边均匀受力,保障平台在长时间的工作后不发生塑性变形和结构性破坏。
附图说明
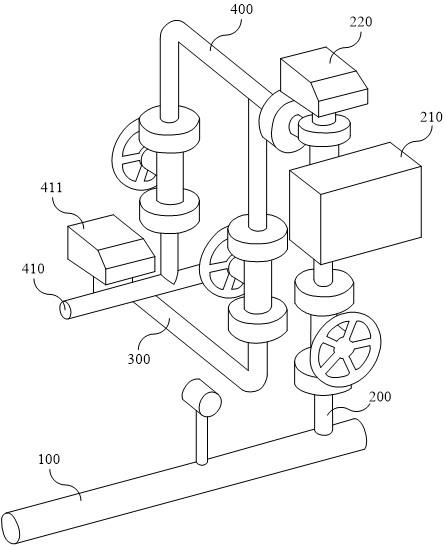
19.图1为本发明定位装置与机具工作平台安装时的位置关系图;
20.图2为本发明圆形孔桩井口定位装置的结构示意图;
21.图3为本发明方形孔桩井口定位装置的结构示意图;
22.图4为本发明圆形机具工作平台的结构示意图;
23.图5为本发明方形机具工作平台的结构示意图;
24.图6为本发明水平调节液压支撑杆的连接结构示意图。
具体实施方式
25.下面结合附图对本发明的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。此外,下面所描述的本发明各个实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互组合。
26.如图1
‑
6所示,一种适用于竖井掘进中的十字桁架机具工作平台,包括设置在竖井井口的定位装置1,及所述定位装置1正下方配置的机具工作平台2,所述定位装置1上配置有激光传感器3,所述机具工作平台2上配置有与所述激光传感器3对应的激光指示发生器4,所述机具工作平台2上铰接有设置吊装架9及水平调节液压支撑杆10,所述水平调节液压支撑杆10与所述吊装架9远离所述机具工作平台2的一端铰接,所述吊装架9上设置有吊钩11,所述吊钩11上配置有吊索12,所述机具工作平台2、激光传感器3及水平调节液压支撑杆10连通有控制主机。
27.所述定位装置1为圆形孔桩井口定位装置及方形孔桩井口定位装置中的一种。使得本技术的固定系统能够使用于圆形孔桩井口及方形孔桩井口两种竖井掘进,使得本技术固定系统使用范围更广,实用性更强。
28.所述定位装置1包括呈十字交叉结构设置的两根横梁5,及设置在所述横梁5四端的定位桩6,所述激光传感器3设置在两根所述横梁5的交叉处。该设置主要是能够使得定位更加精准,
29.所述机具工作平台2为圆形机具工作平台及方形机具工作平台中的一种。使得本技术的固定系统能够使用于圆形孔桩井口及方形孔桩井口两种竖井掘进,使得本技术固定系统使用范围更广,实用性更强。
30.所述机具工作平台2包括呈十字交叉结构设置的两根定位架主梁7,及所述定位架主梁7两端设置的液压支撑伸缩杆8,所述激光指示发生器4设置在两根所述定位架主梁7的交叉处。该设置主要是便于使装置定位更加精准,确保钻机的施工质量。
31.所述激光指示发生器4设置在减震液体内,所述激光指示发生器4底部设置有配重块。激光指示发生器安装在减震液体内,并配置有配重,保证发生器在重力的作用下垂直,同时防止机械工作时的振动传递给仪器,造成仪器损坏。
32.所述吊索12顶端连接有安装模块基座,所述定位装置1设置在所述安装模块基座上。该设置主要是便于降低本技术机具工作平台的重心,使本技术固定系统给钻机及其他相应工具提供一个稳固的安装基座和工作平台
33.所述控制主机控制连接有钻机。该设置主要是通过计算机控制操作,实现钻机钻井。
34.本技术中,采用十字桁架结构的定位装置1,用于通过安装模块化的基座组装成为不同类型的工作机具;通过机具工作平台2的定位架主梁7配合液压支撑伸缩杆8,实现机具工作平台2水平单级、多级液压支撑的伸缩,适应不同尺寸的圆形孔桩和方形的抗滑桩,并稳定支撑在护壁上,保证工作机具的平稳工作;通过水平调节液压支撑杆10调节机具工作平台2水平和安装基座的中心位置;通过定位装置1上安装的传感器,测量和记录机具工作平台2紧固后的水平、倾斜等参数,并由控制主机进行记录和计算,作为工作机具工作时的补偿数据。
35.而且,本技术中,支撑装置2上安装倾角传感器,控制主机接收传感器的数据后,控制水平调节液压支撑杆10调节水平位置,水平方向平衡后,支撑梁支撑装置2上液压支撑伸缩杆8将定位架主梁7预固定在竖井护壁上,平衡梁吊装装置收回地面。
36.本技术在使用过程中,井口中心位置由全站仪确定位置后,安装激光传感器3,设置为工作基点位置;支撑装置2上的激光指示发生器4安装在减震液体内,并经过配重,保证发生器在重力的作用下垂直,同时防止机械工作时的振动传递给仪器,造成仪器损坏;
37.机具工作平台2中心位置的激光指示发生器4向垂直方向上发射激光束;激光传感器3接收到激光指示发生器4的激光信号后,由控制主机计算机具工作平台2与工作基点在水平位置上的x、y的位置偏差,控制主机发送指令,控制机具工作平台2上的水平调节液压支撑杆10,调整x、y坐标与工作基点重合;
38.同时,控制主机向定位架主梁7四个液压支撑伸缩杆8发送命令,同时动作将定位架主梁7紧固在竖井的护壁上,当机具工作平台2的中心位置发生偏移时,由控制主机计算x、y轴上的偏差,通过位置数据补偿,让定位架主梁7上的工作设备工作时正确找到工作基点。
39.本技术为了保证钻机及其他机具的工作平稳和动作的精确性,对工作平台的位置精度有较高的要求。工作平台稳定支撑时,通过激光传感器3及倾角传感器计算和感知平台所处孔间的相对位置,所得到的数据用于修正和调节钻机及其他机具工作时的初始位置。同时为了延长工作平台的使用寿命,并能在机具工作产生的冲击力的反作用力下不会发生大的位移,必须确保机具工作平台2的四边均匀受力,保障平台在长时间的工作后不发生塑性变形和结构性破坏。
40.以上结合附图对本发明的实施方式作了详细说明,但本发明不限于所描述的实施
方式。对于本领域的技术人员而言,在不脱离本发明原理和精神的情况下,对这些实施方式进行多种变化、修改、替换和变型,仍落入本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。