基于csi与众包迁移自校准更新的位置指纹定位方法
技术领域
1.本发明涉及的是一种无线定位领域的技术,具体是一种基于csi与众包迁移自校准更新的位置指纹定位方法,适用于lte/nr等其他无线通信系统。
背景技术:
2.现有基于wi
‑
fi的室内定位技术一般有三角定位法和位置指纹法等。虽然位置指纹法定位一般需要消耗一定的人力来构建指纹库,但是定位精度相对较高。而位置指纹定位中,指纹库的构建也面临着各种条件,这个过程是耗时、劳动密集并且易受环境变化影响的。信息采集通常需要专业的测量员来测量。现有的室内定位方法,通过预先收集室内各个区域的csi数据作为离线指纹库用于深度神经网络训练,并采用训练后的深度神经网络对待测试的csi数据进行识别,通过基于概率向量的用户位置测试方法实现室内精确定位。但这些技术维护成本过高且无法实时更新指纹库和定位模型,从而导致定位精度较差。
技术实现要素:
3.本发明针对现有技术存在的上述不足,提出一种基于csi与众包迁移自校准更新的位置指纹定位方法,在训练阶段,通过算法建立位置指纹定csi和室内参考点(rp)之间的映射关系,利用相邻时间收集的csi数据的相似性,基于迁移学习算法将在旧领域学习过的模型应用于新领域。提高模型的泛化性能,从而提高定位精度。
4.本发明是通过以下技术方案实现的:
5.本发明涉及一种基于csi与众包迁移自校准更新的位置指纹定位方法,通过众包参与者频繁地更新有位置标签的位置指纹,由服务器通过基于深度迁移学习的算法重建指纹与位置之间的关系,即更新神经网络的参数,通过更新后的神经网络在在线测试阶段实现更为精确的定位精度。
6.所述的众包参与者频繁地更新有位置标签的位置指纹,通过栅格区域a
m
内对采集到的csi数据进行平均来更新位置指纹h(a
m
,t
n 1
),从而消除随机测量误差。
7.所述的神经网络,包括五个卷积层和一个平均池化层,该神经网络使用具有softmax输出的fc层来提供归一化概率。技术效果
8.与现有技术相比,本发明具有更高的精确度和更好的系统鲁棒性;具有较少的新收集的数据;具有较低的计算复杂度;具有较快的在线测试速度;具有较低的成本。
附图说明
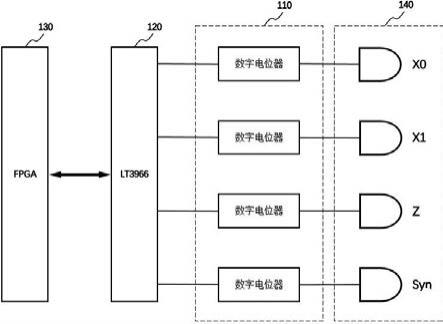
9.图1为本发明系统示意图;
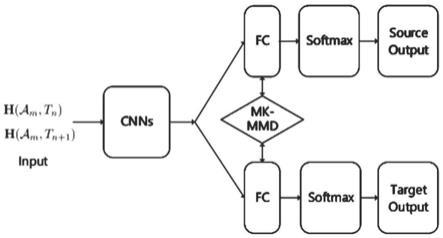
10.图2为本发明深度迁移学习网络的结构示意图;
11.图3为实施例实验环境示意图;
12.图4为实施例不同算法的定位距离误差的cdf示意图;
13.图5为实施例新收集数据占不同百分比的定位误差cdf示意图。
具体实施方式
14.如图1所示,为本实施例涉及一种基于csi与众包迁移自校准更新的位置指纹定位方法,通过众包参与者频繁地更新有位置标签的位置指纹,由服务器通过基于深度迁移学习的算法重建指纹与位置之间的关系,即更新神经网络的参数,通过更新后的神经网络在在线测试阶段实现更为精确的定位精度,具体包括:
15.步骤1、初始化位置指纹库:初始化的位置指纹库存储的csi数据来自n
r
个栅格区域,即:其中:为在初始时刻t0在栅格区域a
m
具有n
sc
个子载波和n
s
个ofdm符号的信道响应,则整个位置指纹库的初始化为:个ofdm符号的信道响应,则整个位置指纹库的初始化为:
16.优选地,在实际应用中,通常很难得到整个栅格区域的信道响应,因此将每个栅格区域中心位置的csi数据视为区域的csi数据,其中:参考点l
m
的csi数据h(l
m
,t0)通过标准的mmse信道估计算法获得。
17.步骤2、获取位置信息和csi数据:当个众包参与者将各自的位置信息和csi数据通过wi
‑
fi,gps接收器和imu传感器发送至服务器以获得准确的位置信息并由获得众包参与者的位置和csi数据其中
18.所述的imu传感器包括加速度计、陀螺仪和磁力计。
19.优选地,本实施例设计了gps信号检测器来帮助评估信号质量,具体为:发现当所有检测到的卫星的gps信号的平均snr超过26dbm时,gps信号可以给出相对精确的定位结果。请注意,如果检测到的卫星数量少于3个,则认为定位结果不准确;只有在多次测试中信号质量满足要求时,才记录下初始位置l0。
20.优选地,对所收集的imu传感器数据应用离线的行人航迹推算(pdr)算法获得准确的位置信息,具体为:极短时间内的pdr位移为其中:n
l
为步数,l
k
为众包参与者的第k个步长,α
k
为第k个航向。
21.进一步优选地,在此pdr计算过程中,利用粒子滤波来减少imu的距离误差,具体算法为:基于蒙特卡洛方法,使用粒子集来表示概率。经过初始化、预测、粒子权重更新、重采样的过程,之后再重复的预测、更新、重采样,使得粒子逐渐向真实位置聚集。
22.步骤3、更新位置指纹库:用ω
i
(a
m
)表示栅格区域a
m
的位置集合,的位置集合,通过栅格区域a
m
内对采集到的csi数据进行平均来更新位置指纹h(a
m
,t
n 1
),从而消除随机测量误差,具体为:
23.其中:t
n 1
的位置指纹库
为
24.步骤4、训练指纹自适应的深度迁移学习网络深度适配网络(deep adaptation network,dan):如图2所示,本实施例通过具有五个卷积层和一个平均池化层的神经网络dan获取特征向量,该神经网络使用具有softmax输出的fc层来提供归一化概率,详细配置和参数见表1所示。
25.表1网络配置和参数的概述
26.所述的神经网络dan具体计算过程为:所述的神经网络dan具体计算过程为:其中:n
r
为参考点数量,λ,μ∈[0,1]表示数据相似性的微调系数且λ μ=1,φ()是映射用于把原变量映射到再生希尔伯特空间中。
[0027]
所述的神经网络dan使用联合损失,考虑交叉熵损失函数和自适应损失mk
‑
mmd,通过最小化损失函数来调整网络中的参数,具体为:过最小化损失函数来调整网络中的参数,具体为:其中:nr为参考点数量,为交叉损失函数,d
mk
‑
mmd
(db
n
,db
n 1
)为自适应损失mk
‑
mmd;并在训练阶段,利用adam优化器对深度神经网络的参数进行训练,使上述损失函数最小化。
[0028]
所述的神经网络dan的训练样本的具体设置为:选取15个参考点,在时刻t
n
发射100个数据包,获取的原始csi预处理后输出长度为180的向量;在时刻t
n 1
发射50个数据包,获取的原始csi预处理后输出长度为180的向量。即15个参考点每个参考点源域数据大小100
×
180,目标域数据大小50
×
180。
[0029]
所述的原始csi预处理具体是指:将csi复数数据转化为幅度值和相位值,分别对csi幅度值和相位值去噪,全展开转变为长度为180一维向量,其中前90是去噪后的csi幅度值,后90是去噪后的csi相位值。
[0030]
步骤5、在线阶段精确定位:用户向服务器发送其实时csi,根据步骤4训练后的神经网络基于实时csi输出n
r
维概率向量,进而得到最终的估计位置:其中:n
r
为参考点数量,为在时刻t
n 1
第m个参考点概率,为第m个参考点位置。
[0031]
本实施例涉及一种实现上述方法的众包系统,包括:位置指纹库初始化单元、位置指纹库更新单元、网络训练单元以及在线阶段位置预测单元,其中:位置指纹库初始化单元与服务器相连并传输初始位置指纹库,位置指纹库更新单元与服务器相连并传输更新的位置指纹库,网络训练单元与服务器相连并传输网络参数信息,在线阶段位置预测单元与用户设备相连并传输定位结果。
[0032]
本实施例在作为接收机的访问接入点tp
‑
link无线路由器、作为发射机的移动设备nexus 5环境下进行具体测试:ap和移动设备都配有无线网卡,且接收机的无线网卡具有m根天线,发射机的无线网卡具有n根天线与发射机构成m
×
n的收发天线对。在实验室场景下,约30m 2的实验室被分成15个参考点区域,每个参考点区域的大小为1.2m
×
1.2m,接收机被固定在如图3所示的位置。发射机在t
n
的每个标签区域内发射100个数据包,在t
n 1
的每个标签区域内发射50个数据包,每两个包之间的时间是4ms。发射机在发射过程中在该区域内走动,以确保能收集区域内各个位置的位置指纹。发射机与接收机之间有1
×
3的收发天线对,每一对收发天线可以获得30个子载波的csi,所以在t
n
每个标签区域可以采集1
×3×
30
×
100个csi指纹信息,在t
n 1
每个标签区域可以采集1
×3×
30
×
50个csi指纹信息。
[0033]
在t
n
数据全部展开变成一个长度为1
×1×1×
180的向量,在t
n 1
数据全部展开变成一个长度为1
×1×1×
180的向量,两个向量作为输入张量,输入dnn网络,那么dnn网络源域拥有1500个输入张量,目标域拥有750个输入张量。
[0034]
具有更高的精确度和更好的系统鲁棒性。如图4所示,深度迁移dan平均定位误差为1.01m,由于非深度迁移jda的1.15m。在近似大小的实验区域下,提出的发明具有优于其他发明的定位精度。
[0035]
较少的新收集的数据。如图5所示,新收集数据占70%的平均定位误差为0.63m,新收集数据占50%的平均定位误差为1.01m,新收集数据占30%的平均定位误差为1.14m。基于以上结果,如果新采集的数据能够更新一半的指纹数据库,众包定位系统可以提供大约一米的准确率。
[0036]
计算复杂度较低。如表2所示,基于knn的方案无论数据量所花费的时间最少,因为只进行匹配和分类处理,而不进行复杂的指纹迁移处理。对于基于jda的方案无论数据量所花费的时间最多,因为大部分计算时间用于完成迭代过程以找到合适的矩阵。本实施例提出的基于深度迁移学习的定位方法具有较高的定位精度和较低的计算复杂度,减少了定位系统的计算过载。
[0037]
表2不同方法总运行时间的比较
[0038]
在线测试速度快:不同于现有的机器学习算法无监督学习并且不具备自动提取特征的能力,在线测试时间与指纹维度、离线指纹数据库的大小呈线性增长关系,当指纹数据库较大时,在线测试速度很慢。不同于mpeg在线更新,花费很长时间,甚至耗尽计算机的内存。本发明利用深度学习方法,离线数据库的大小只会影响离线训练的训练时间。当网络结
构,即网络层数每层神经元个数确定时,在线测试时间确定。更新数据库在离线阶段进行,不占用在线测试时间。在线测试阶段只需要将实时的csi信息输入训练好的神经网络,即可得到用户的实时位置,计算复杂度低,计算速度快,用户可以获得无缝的定位服务。
[0039]
上述具体实施可由本领域技术人员在不背离本发明原理和宗旨的前提下以不同的方式对其进行局部调整,本发明的保护范围以权利要求书为准且不由上述具体实施所限,在其范围内的各个实现方案均受本发明之约束。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。