1.本发明涉及拣货设备技术领域,特别地,涉及一种自动拣货设备及其使用方法。
背景技术:
2.拣货设备,也称分拣设备,主要用于物流行业,货箱进行分拣,通常采用扫描器扫描识别的方式进行自动分拣。
3.例如申请号为cn201811576314.0一种物流自动分拣设备,其包括机架、设置在机架上的主传送带,所述机架两侧分别间隔设置有出料口,所述机架的一端为投入口,所述投入口处设置有扫码器,所述出料口处设置有用于推动货物的推板,所述推板背离出料口一侧设置有气缸,所述气缸的活塞杆上连接有固定板,所述固定板与推板之间连接有若干缓冲器。本发明具有能够避免货物包装在分拣时被损坏的效果。
4.上述方案中,虽能实现自动分拣,但是在实际使用过程中,由于其扫码器裸露在传送带上方,从而使得扫码器易被碰撞损坏,而且不同的货箱高度有所差异,使得扫码器难以较为精准的对焦扫描,故还有待改进。
技术实现要素:
5.有鉴于此,本发明目的是提供一种自动拣货设备及其使用方法。
6.为了解决上述技术问题,本发明的技术方案是:
7.一种自动拣货设备,包括扫描单元和分拣单元,所述分拣单元根据扫描单元的扫描结果进行相应的分拣动作,所述扫描单元包括第一传送带和扫描器;所述第一传送带呈透明结构,且所述第一传送带至少包括一水平输送面,且所述第一传送带内部具有安装空间;所述扫描器设于安装空间中,且扫描器的扫描端向上朝向第一传送带的水平输送面;所述拣货设备还包括用于对货箱条码面进行清洁的清洁单元。
8.采用本方案的优点在于:
9.首先本方案中,将第一传送带设置成透明结构,并将扫描器置于第一传送带的水平输送面下方,如此只需将货物的条码面朝下放置在第一输送带上,扫描器便可对其底部进行扫描识别,如此无论货箱的高度多高,货箱的条码面距扫描器的距离始终都是一致的,故而无需调整扫描器的位置。而且扫码器是隐藏在第一传送带下方的,故而使得扫码器难以被外物碰撞。
10.其次,本方案中,还设置有清洁单元,如此便可在货箱扫描器对货箱底部条码面进行清洁,以清除附着在条码上的灰尘,防止灰尘对后续的扫码工作造成干涉。
11.进一步的,清洁单元包括设于第一传送带进货侧的第二传送带,以及推料机构;所述第二传送带传送方向与第一传送带传送方向相反;所述推料机构包括第一检测件和用于推送货箱的执行件,当货箱随第二传送带传送至第一检测件位置时触发第一检测件,执行件响应第一检测件,将该货箱推送至第一传送带上。
12.进一步的,所述执行件包括设于第二传送带上方的推板,以及与推板连接用以驱
动推板沿传送带长度方向位移的驱动件;所述第一检测件设于推板内侧。
13.进一步的,所述第二传送带两侧均设有若干红外传感器,当红外传感器感应到人体信号时,驱动件停止动作。
14.进一步的,所述第二传送带包括设于第二传送带两侧且槽口朝上的容纳槽;所述红外传感器设于容纳槽内,所述容纳槽的槽口处设有覆盖该槽口的透明盖板。
15.进一步的,清洁单元包括设于第一传送带进货侧的第二传送带,以及固定安装在第二传送带远离第一传送带一端用以阻挡货箱的挡板;所述挡板上设有第二检测件,当货箱抵靠挡板时,第二检测件被触发;所述清洁单元还包括计时器,以及与第二传送带和第二检测件电连接的控制器,当第二检测件被触发时,计时器开始计时,当计时器计时达预设时间后,控制器控制第二传送带反转。
16.进一步的,所述清洁单元还包括与控制器电连接的第三检测件;所述第三检测件设于第二传送带上,当货箱位于扫描区域时,控制器控制第二传送带正转。
17.进一步的,所述清洁单元还包括用以清洁第二传送带的除尘组件;所述除尘组件包括转动连接在第二传送带底部用以清刷第二传送带外带面的辊刷,以及驱动辊刷旋转的驱动电机。
18.进一步的,所述除尘组件还包括固定安装在第二传送带底部且上端敞口的吸尘罩,以及吸风机;所述辊刷位于吸尘罩的内,所述吸风机的进风端通过风管与吸尘罩连通。
19.本方案还提供一种上述方案所述的自动拣货设备的使用方法,包括如下步骤:
20.s1、将货箱的条码面朝下并置于清洁单元上,通过清洁单元对货箱的条码面进行清洁;
21.s2、经清洁后的货箱输送至第一传送带上,通过第一传送带带动前进,当货箱运动至扫描器的扫描区域时,货箱底部的条码被扫描器扫描识别,货箱继续前进至分拣单元;
22.s3、分拣单元根据扫描器的扫描结构,对货箱进行分拣动作。
23.本方案的其他优点和效果在具体实施方式部分进行具体阐述。
附图说明
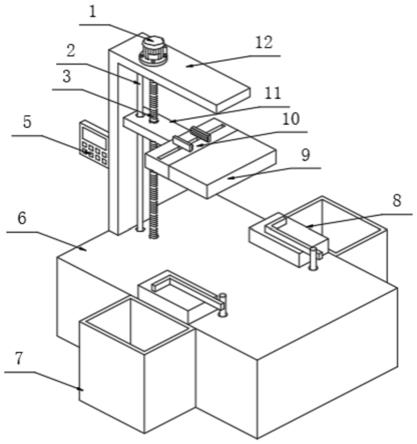
24.图1为实施例1的整体结构示意图;
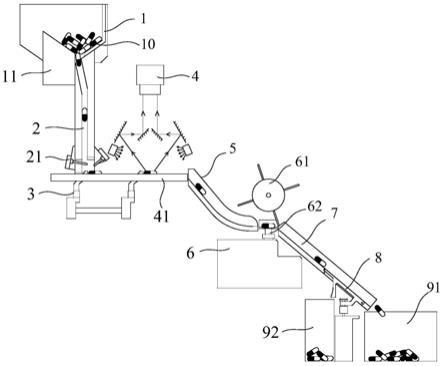
25.图2为实施例1的内部结构示意图;
26.图3为图1中a部的放大图;
27.图4为实施例2的清洁单元结构示意图;
28.图5为实施例2的清洁单元的内部结构示意图。
具体实施方式
29.以下结合附图,对本发明的具体实施方式作进一步详述,以使本发明技术方案更易于理解和掌握。
30.实施例1:
31.如图1所示,本实施例提供一种自动拣货设备,包括扫描单元1和分拣单元2,所述分拣单元2根据扫描单元1的扫描结果进行相应的分拣动作。
32.具体的,分拣单元2包括分拣传送带21,设于扫描单元1的出货侧;分拣传送带21的
机架一侧设有若干出货道22,相对出货道22一侧固定安装有若干推送气缸23,推送气缸23的轴端安装有推货板24,扫描单元1扫描货物后,当货物在分拣传送带21上行进至对应的推送气缸23位置时,推送气缸23通过推货板24将货箱推送至对应的出货道22中,以实现拣货。
33.结合图2所示,所述扫描单元1包括第一传送带11和扫描器12;所述第一传送带11整体呈透明结构,以保证扫描器12可以透过第一传送带11的带面进行扫描;所述第一传送带11至少包括一水平输送面,且所述第一传送带11内部具有安装空间,该安装空间主要用于安装扫描器12;所述扫描器12设于安装空间中,且扫描器12的扫描端向上朝向第一传送带11的水平输送面;具体的,在安装空间中固定安装有安装梁10,扫描器12安装在安装梁10上,为了给扫描器12扫描补光,本实施例中,在安装梁10上还可安装补光灯13。
34.所述拣货设备还包括用于对货箱条码面进行清洁的清洁单元。
35.首先本方案中,将第一传送带11设置成透明结构,并将扫描器12置于第一传送带11的水平输送面下方,如此只需将货物的条码面朝下放置在第一输送带上,扫描器12便可对其底部进行扫描识别,如此无论货箱的高度多高,货箱的条码面距扫描器12的距离始终都是一致的,故而无需调整扫描器12的位置。
36.其次,本方案中,还设置有清洁单元,如此便可在货箱扫描器12对货箱底部条码面进行清洁,以清除附着在条码上的灰尘,防止灰尘对后续的扫码工作造成干涉。
37.为了可以实现自动清洁,本实施例中,如图2所示,清洁单元包括设于第一传送带11进货侧的第二传送带31,以及推料机构;所述第二传送带31传送方向与第一传送带11传送方向相反,比如第一传送带11的送货方向是向左,则第二传送带31的送货方向则是向右;所述推料机构包括第一检测件32和用于推送货箱的执行件33,当货箱随第二传送带31传送至第一检测件32位置时触发第一检测件32,执行件33响应第一检测件32,将该货箱推送至第一传送带11上。
38.通过上述设置,当将货箱放置在第二传送带31上后,第二传送带31带动货箱向推料机构一侧运动,直至位移至第一检测件32位置时,执行件33推动货箱向第一传送带11方向移动,在此过程中,第二传送带31继续保持原来的输送方向运动;执行件33推动货箱在第二传送带31上前进的过程中,货箱的底部(并非指的实质意义上的底部,而是指具有条码的一面)与第二传送带31表面进行摩擦,如此第二传送带31便可擦除条码上灰尘,以保证后续扫描效果。而且在执行件33推送货箱的同时,第二传送带31还是保持原有方向运动,如此相当于一个移动的除尘件在进行运动除尘,可以提高除尘效果,换言之,假设第二传送带31在执行件33推货的同时保持静止,则仅有第二传送带31的上带面可以承担除尘效果,而本实施例中运动的第二传送带31则不然,其可以保持持续运动状态,使得第二传送带31整个外带面均可承担除尘任务,无疑可以提高除尘效果。
39.而且将第二传送带31设置成与第一传送带11传送方向相反,其还有一个目的在于,使得无论将货箱放置在第二传送带31的何位置,第二传送带31均可最终将其输送至第一检测件32位置,使得货箱在执行件33推送时,有足够的移动行程与第二传送带31摩擦除尘。
40.当然为了起到良好的除尘效果,第二传送带31可以设置成两层结构(图中未示出),内带层和固定在内带层外部的外带层,外带层可以由无尘布、棉布、毛布其中之一构成,如此便可由外带层进行摩擦除尘,内带层负责带动外带层转动。
41.本实施例中,如图2所示,所述执行件33包括设于第二传送带31上方的推板332,以及与推板332连接用以驱动推板332沿传送带长度方向位移的驱动件331;所述第一检测件32设于推板332内侧。其中,执行件33可以采用驱动气缸或者直线伺服模组(比如丝杠丝母结构),本实施例展示的是驱动气缸,驱动气缸安装在第二传送带31远离第一传送带11一端,与推板332固定,通过驱动气缸的动作来带动推板332前进,以实现推送货箱的目的,其中第一检测件32可以采用接近传感器,接近开关等,其嵌设在推板332的内侧壁上。当货箱抵靠在推板332上时,第一检测件32便被触发,进而驱动气缸伸长,将货箱推送至第一传送带11上,此时货物便由第一传送带11带动前进,此时货箱与推板332分离,第一检测件32触发信号消失,驱动气缸复位,准备下次动作。
42.如果在驱动气缸推送货箱时,人手放入其推送路径上,很容易被驱动气缸挤压到,造成安全事故,故本实施例做进一步的改进,所述第二传送带31两侧均设有若干红外传感器312,当红外传感器312感应到人体信号时,驱动件331停止动作。
43.具体的,结合图1和图3所示,所述第二传送带31两侧的机架上端开设槽口朝上的容纳槽311,所述红外传感器312设于容纳槽311内,所述容纳槽311的槽口处设有覆盖该槽口的透明盖板(图中未示出),通过透明盖板对槽内的红外线传感器起到保护效果。如此两机架上部便相当于形成一道虚拟的警戒墙,当人手位于容纳槽311上方时,即穿过警戒墙,红外线传感器便被触发,使得驱动气缸停止动作,以防止气缸继续动作造成危险。
44.由于第二传送带31长时间的使用,其外带面上会附着较多的灰尘,从而会影响后续的除尘效果,故在本实施例中,如图2所示,所述清洁单元还包括用以清洁第二传送带31的除尘组件;所述除尘组件包括转动连接在第二传送带31底部用以清刷第二传送带31外带面的辊刷41,以及驱动辊刷41旋转的驱动电机(图中未示出)。如此第二传送带31在转动的过程中,驱动电机会带动辊刷41不断旋转,使得辊刷41不断清刷第二传送带31的外带面,以减少第二传送带31上的灰尘量,保证后续的除尘效果。
45.为了使得辊刷41清除下来的灰尘不至于四散飘逸,本实施例中,所述除尘组件还包括固定安装在第二传送带31底部且上端敞口的吸尘罩42,以及吸风机43;所述辊刷41位于吸尘罩42的内,所述吸风机43的进风端通过风管44与吸尘罩42连通,如此辊刷41清扫出的灰尘会被吸风罩吸收,进而由吸风机43向外排出。
46.本实施例的使用方法为:
47.s1、将货箱的条码面朝下并置于清洁单元上,通过清洁单元对货箱的条码面进行清洁;
48.s2、经清洁后的货箱输送至第一传送带11上,通过第一传送带11带动前进,当货箱运动至扫描器12的扫描区域时,货箱底部的条码被扫描器12扫描识别,货箱继续前进至分拣单元2;
49.s3、分拣单元2根据扫描器12的扫描结构,对货箱进行分拣动作。
50.实施例2,
51.本实施例是在实施例1的基础上进行改进,与实施例1的区别仅在于清洁单元的不同,具体的,本实施例中,如图4所示,清洁单元包括设于第一传送带11进货侧的第二传送带31,以及固定安装在第二传送带31远离第一传送带11一端用以阻挡货箱的挡板34;初始状态下,第二传送带31的传送方向与第一传送带11传送方向相反。
52.所述挡板34上设有第二检测件35,可以采用接近开关或接近传感器,当货箱抵靠挡板34时,第二检测件35被触发;所述清洁单元还包括计时器(可以采用555定时芯片),以及与第二传送带31和第二检测件35电连接的控制器,当第二检测件35被触发时,计时器开始计时,当计时器计时达预设时间后,比如3秒,控制器控制第二传送带31反转,这里的反转指的是与第二传送带31初始状态输送方向相反。
53.使用时,将货箱置于第二传送带31上,此时第二传送带31带动货箱向挡板34一侧输送,最终货箱在挡板34的阻挡下会抵靠在挡板34上,进而被第二检测件35触发,此时计时器开始计时,在计时器的计时时间段内,第二传送带31继续保持原方向输送,而货箱则由于被挡板34阻挡无法移动,此时第二传送带31便可与货箱的底部进行相对运动,不断摩擦货箱的底部,以对货箱的底部进行除尘。当计时器计时结束后,此时控制器则控制第二传送带31反转,即带动货箱向第一传送带11一侧输送,最终输送至第一传送带11上进行输送扫描。
54.为了使得第二传送带31在输送完货箱后可以自动恢复初始状态进行下次动作,本实施例中,如图4所示,所述清洁单元还包括与控制器电连接的第三检测件36;所述第三检测件36设于第二传送带31上,当货箱位于扫描区域时,控制器控制第二传送带31正转,这里的正转指的是第二传送带31初始状态下的输送方向,即与第一传送带11相反的输送方向,如此以供下一个货箱除尘使用。
55.具体的,第三检测件36包括用于发射红外光的发射端361和用于接收该红外光的接收端362,接收端362和发射端361分别设于第一传送带11两侧的中间处,接收端362与控制器连接,当接收端362未接收到发射端361发射的红外光时,控制器控制第二传送带31正转;如此当货箱随第一传送带11传送至发射端361和接收端362之间位置时,货箱会遮挡住发射端361发射的红外光,使得接收端362无法接收,进而使得控制器控制第二传送带31正转。
56.当然,本实施例中的第二传送带31也可设置成两层结构,内带层和固定在内带层外部的外带层,外带层可以由无尘布、棉布、毛布其中之一构成,如此便可由外带层进行摩擦除尘,内带层负责带动外带层转动。
57.本实施例中,所述清洁单元还包括用以清洁第二传送带31的除尘组件,本实施例的除尘组件结构与实施例1的除尘组件结构相同,具体的,如图5所示,所述除尘组件包括转动连接在第二传送带31底部用以清刷第二传送带31外带面的辊刷41,以及驱动辊刷41旋转的驱动电机。如此第二传送带31在转动的过程中,驱动电机会带动辊刷41不断旋转,使得辊刷41不断清刷第二传送带31的外带面,以减少第二传送带31上的灰尘量,保证后续的除尘效果。
58.所述除尘组件还包括固定安装在第二传送带31底部且上端敞口的吸尘罩42,以及吸风机43;所述辊刷41位于吸尘罩42的内,所述吸风机43的进风端通过风管44与吸尘罩42连通,如此辊刷41清扫出的灰尘会被吸风罩吸收,进而由吸风机43向外排出。
59.以上只是本发明的典型实例,除此之外,本发明还可以有其它多种具体实施方式,凡采用等同替换或等效变换形成的技术方案,均落在本发明要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。