技术特征:
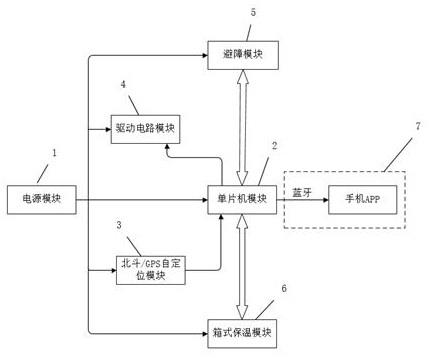
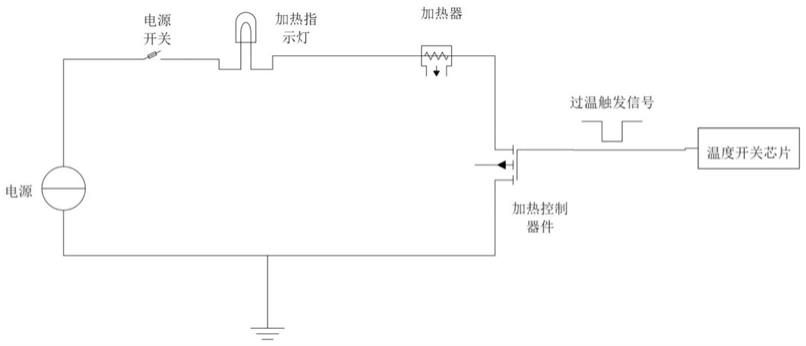
1.一种自定位导航的送餐机器人,其特征在于:包括电源模块(1)、单片机模块(2)、北斗/gps自定位模块(3)、驱动电路模块(4)、避障模块(5)、箱式保温模块(6)、蓝牙传输模块(7),送餐机器人通过北斗/gps自定位模块(3)对商家到用户送餐时进行高精度、高灵敏度的自定位,机器人自定位信息与用户所在的目标点进行对比,设定最佳的送餐路线,驱动电路模块(4)驱动电机转动控制机器人的行走和停止,通过改变pwm占空比的方式,控制电机的速度,实现对机器人送餐时的速度控制,单片机模块(2)以stm32单片机为主控芯片,用来对机器人送餐的数据运算和智能控制,北斗/gps自定位模块(3)对机器人送餐过程中所在的位置进行确定,与目标送餐地点对比,单片机模块(2)对两个地点的坐标进行运算,选择最佳的送餐路径,驱动电路模块(4)驱动机器人行走,避障模块(5)利用红外反射原理检测周围是否存在障碍物,检测到障碍物上传到单片机模块(2),单片机模块(2)改变机器人转向躲避障碍物,并转换路径,箱式保温模块(6)采集机器人车体的内部温度,将检测的温度上传到单片机模块(2),单片机模块(2)的控制端经加热棒对车体内部进行温度保持,蓝牙传输模块(7)利用手机app通过蓝牙和机器人配对连接来实现手机控制机器人车体的开关盖,电源模块(1)分别对接单片机模块(2)、北斗/gps自定位模块(3)、驱动电路模块(4)、避障模块(5)、箱式保温模块(6)进行供电。2.根据权利要求1所述一种自定位导航的送餐机器人,其特征在于:所述北斗/gps自定位模块(3)包括射频芯片(8)、放大滤波电路、下变频电路、模数转换电路、单片机控制器、flash电路(9)、电平转换电路、uart控制电路(10),其中射频芯片(8)接收来自北斗/gps卫星导航系统的信号,通过放大滤波电路将信号进行放大、滤波,传输到下变频电路将信号转换成中频信号,再通过模数转换电路将其转换为数字信号,传输给单片机控制器,单片机完成导航解算和信息输出,通过flash电路(9)运行导航定位程序,通过电平转换电路以及uart控制电路(10)将导航定位信息输送给外部机器。3.根据权利要求1所述一种自定位导航的送餐机器人,其特征在于:所述驱动电路模块(4)驱动电机转动使机器人行走和停止,通过改变pwm占空比的方式,来控制电机的速度,采用pwm控制对脉冲宽度进行调制,通过占空变化实现对电机速度的控制,输出波形的占空比变化来使输出电压和输出频率发生变化,电机的速度和占空比成正比,所述避障模块(5)包括红外对管(11)、电压比较器lm393(12)、电源二极管指示灯、开关二极管指示灯、ttl开关信号输出点d0、电阻、电位器及电感,避障模块(5)接通电源,电源指示灯亮起,红外对管(11)中的发射管开始发射指定频率的红外光,当检测到周围有障碍物时,红外线反射回来被红外接收管吸收,经电压比较器lm393(12)对比分析,ttl开关信号输出点d0输出低电平,开关指示灯亮起。
技术总结
本实用新型公开了一种自定位导航的送餐机器人,包括:电源模块、单片机模块、北斗/GPS自定位模块、驱动电路模块、避障模块、箱式保温模块、蓝牙传输模块,通过北斗/GPS自定位模块,对机器人送餐时所在的位置进行确定,传送到单片机模块里,与目标送餐的地点进行对比,设定的最佳路径,驱动电路模块驱动机器人的行走,避障模块保障送餐时的安全,蓝牙传输模块利用手机APP和蓝牙配对连接来实现手机控制开关盖。盖。盖。
技术研发人员:陈雷 姜树海 陈佳玲 骆博文
受保护的技术使用者:南京林业大学
技术研发日:2021.01.21
技术公布日:2021/10/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。