1.本实用新型涉及电器开关技术领域,具体涉及一种高速大开距开关机构。
背景技术:
2.随着经济和社会的发展,各行各业对供电系统的容量要求不断增加,用电系统的短路电流水平也不断加大,对开关电器的开断性能提出了更高的要求,稳定地对供电系统进行开断,对整个供电系统的稳定工作有着至关重要的作用。申请号为201310572594.9的中国发明专利公开了一种三断口双动式高速永磁斥力开关及方法,该发明专利的技术方案所涉及的开关包括开关本体、高速电磁斥力机构、永磁操动机构、触头弹簧、绝缘拉杆等,通过采用两个动触头和两个静触头依次接触,可以在短时间内形成三断口大开距的绝缘距离,以一台开关代替采用多个开关串联的开断方式,实现了提高开断性能的目的。但是该开关结构的每个动触头分别由各自的高速电磁斥力机构和永磁操动机构进行驱动,而且与每个动触头连接的高速电磁斥力机构和永磁操动机构是在各自的合闸分闸控制电路的控制下工作,这样的驱动和控制方式容易使两套电磁斥力结构和永磁操动机构在动作容易出现动作不同步的问题,会对电器开关的分断过程产生不良影响。
技术实现要素:
3.为了解决上述三断口双动式高速永磁斥力开关由两套高速电磁斥力机构和永磁操动机构驱动以及由两套分闸合闸控制电路控制所容易产生的动作不同步的技术问题,本实用新型提出了一种高速大开距开关机构,由一个双稳态操动机构通过连杆机构对两个动触头同时进行驱动,由于采用一个双稳态操动机构,因此相应的分闸合闸电路也只需要一个,解决了采用两套驱动机构和两套驱动电路所带来的技术问题。
4.本实用新型的具体技术方案如下:
5.一种高速大开距开关机构,包括第一动触头连杆机构、第二动触头连杆机构、第一动触头组件、第二动触头组件、静触头组件以及双稳态操动机构,第一动触头组件包括第一动触头,第一动触头与第一动触头驱动杆的一端固定连接,第一动触头驱动杆的另一端滑动置于第一导向孔中。第二动触头组件包括第二动触头,第二动触头与第二动触头驱动杆的一端固定连接,第二动触头驱动杆的另一端滑动置于第二导向孔中。双稳态操动机构驱动杆的一端分别与第一连杆和第四连杆的一端铰接,所述第一连杆另一端与第二连杆一端铰接,第二连杆的另一端与第三连杆的一端铰接,第三连杆的另一端与第一动触头驱动杆铰接,第二连杆与第一连杆及第三连杆铰接位置之间与固定的第一销轴铰接。第五连杆的一端与固定的第二销轴铰接,另一端与第六连杆铰接,第四连杆的另一端与介于第二销轴和第五连杆与第六连杆的铰接点之间部分铰接,第六连杆的另一端与第二动触头驱动杆铰接。静触头组件在开关合闸状态时与第一动触头和第二动触头形成可供电流通过的路径。
6.进一步地,第一动触头和第二动触头为双断点桥式触头,静触头组件包括第一静触头、第二静触头和第三静触头。
7.进一步地,双稳态操动机构为双稳态电磁操动机构或双稳态永磁操动机构。
8.本实用新型的有益效果是:
9.1、本实用新型所涉及的高速大开距开关机构,通过一个双稳态操动机构同时带动两个动触头运动,避免了两个操动机构分别带动两个动触头时的运动不同步的问题。而且,由于采用一个双稳态操动机构,因此只需要一个分闸合闸控制电路,降低了系统的复杂程度,避免了由两个分闸合闸控制电路分别控制两个操动机构所带来的运动不同步的问题。
10.2、本实用新型所涉及的高速大开距开关机构,采用双断点桥式触头,提高了开断能力。
附图说明
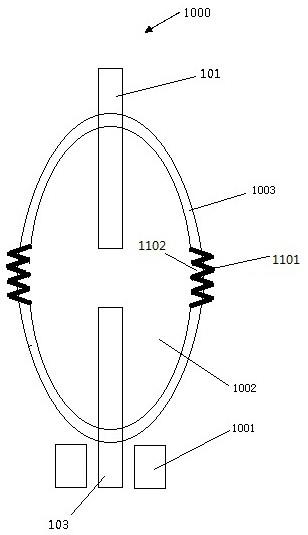
11.图1为本实用新型的高速大开距开关机构处于分闸状态时的示意图;
12.图2为本实用新型的高速大开距开关机构处于合闸状态时的示意图。
13.图中,101、第一连杆;102、第二连杆;103、第三连杆;104、第一销轴;201、第四连杆;202、第五连杆;203、第六连杆;204、第二销轴;301、第一动触头;302、第一动触头驱动杆;303、第一导向孔;401、第二动触头;402、第二动触头驱动杆;403、第二导向孔;501、第一静触头;502、第二静触头;503、第三静触头;6、双稳态操动机构;601、驱动杆。
具体实施方式
14.下面结合附图对本实用新型的技术方案进行具体描述。在本技术的描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“前”、“后”等指示的方位或者位置关系为基于附图所示的方位或者位置关系。
15.在本实用新型技术方案中,除非另有明确说明,术语“安装”、“设置”、“连接”、“固定”等术语应当做广义理解,可以根据其所处的具体技术方案被理解为固定连接或可拆卸连接等,本领域的普通技术人员可根据技术方案中所涉及的具体情况理解上述术语的具体含义。
16.图1所示的一种高速大开距开关机构,包括第一动触头连杆机构、第二动触头连杆机构、第一动触头组件、第二动触头组件、静触头组件以及双稳态操动机构6,对于双稳态操动机构可以采用多种形式,例如采用双稳态电磁操动机构或双稳态永磁操动机构,只要采用可以具有两个稳定状态的可以实现本发明构思的操动机构均可。其中,第一动触头组件包括双断点桥式触头形式的第一动触头301,第一动触头301与第一动触头驱动杆302的一端固定连接,第一动触头驱动杆302的另一端滑动置于第一导向孔303中。第二动触头组件包括双断点桥式触头形式的第二动触头401,第二动触头401与第二动触头驱动杆402的一端固定连接,第二动触头驱动杆402的另一端滑动置于第二导向孔403中。双稳态操动机构6驱动杆601的一端分别与第一连杆101和第四连杆201的一端铰接,第一连杆101另一端与第二连杆102一端铰接,第二连杆102的另一端与第三连杆103的一端铰接,第三连杆103的另一端与第一动触头驱动杆302铰接,第二连杆102与第一连杆101及第三连杆103铰接位置之间与固定的第一销轴104铰接。第五连杆202的一端与固定的第二销轴204铰接,另一端与第六连杆203铰接,第四连杆201的另一端与介于第二销轴204和第五连杆202与第六连杆203的铰接点之间部分铰接,第六连杆203的另一端与第二动触头驱动杆铰接。静触头组件包括
第一静触头501、第二静触头502和第三静触头503。当如图2所示开关机构处于开关合闸状态时,第一动触头301与第一静触头501和第二静触头502相接触,第二动触头401与第二静触头502和第三静触头503相接触,此时两个动触头和各静触头之间形成可供电流通过的路径。
17.下面结合附图1和附图2对本实用新型所涉及的高速大开距开关机构的工作过程进行说明。
18.图1所示,开关机构的第一动触头301和第二动触头401与各个静触头处于分离状态,即此时的开关机构处于分闸状态。当通过电气控制使双稳态操动机构6的驱动杆601向下运动时,此时驱动杆601带动第一连杆101和第四连杆201的右端向下运动。当第一连杆101右端随着驱动杆601向下运动时,由于第一连杆101的左端与第二连杆102的右端铰接,因此第二连杆102绕着第一销轴104发生顺时针转动。当第二连杆102顺时针转动后,与第二连杆102的左端铰接的第三连杆103开始牵引第一动触头驱动杆302向上运动,此时与第一触头驱动杆302固定连接的第一动触头301向上运动与第一静触头501和第二静触头502接触,实现第一动触头301的合闸。同时进行的是,当第四连杆201右端随着驱动杆601向下运动时,由于第四连杆201的左端与介于第二销轴204和第五连杆202与第六连杆203的铰接点之间部分铰接,因此第四连杆201会向下推动第五连杆202绕着第二销轴204逆时针转动,与第五连杆202的左端铰接的第六连杆203开始牵引第二动触头驱动杆402向下运动,此时与第二动触头驱动杆402固定连接的第二动触头401向下运动与第二静触头502和第三静触头503接触,实现第二动触头401的合闸。两个动触头和各静触头接触,完成开关机构的合闸操作,此时整个开关机构处于图2所示状态。当通过电气控制使双稳态操动机构6的驱动杆601向上运动时,此时各连杆的运动与合闸过程相反,此处不做阐述。
19.此处需要说明的是,本领域技术人员可以根据系统对触头开距以及双稳态操动机构的动铁心行程,对各连杆之间的铰接位置以及连杆长度进行调整,此处的双稳态操动机构也可以采用其他可以实现类似功能的直线电磁铁来实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。