1.本发明涉及武器射击训练报靶设备,具体涉及一种空间布阵传感器的无框型光电靶及其实弹报靶方法。
背景技术:
2.在轻武器实弹射击时,子弹打在靶纸上的位置,决定了射手的最终射击成绩。原始的方法是通过人工查看弹孔在靶纸上的位置,计算射击成绩。随着技术的发展,多种自动报靶的设备因运而生,人们不需要手工查看靶纸上的弹孔,即能自动输出子弹在靶纸上的位置。到目前为止,人们已经发明了导电式、激波(超声波)传感、光学(激光)传感等多种方法的报靶产品。这些产品各有优缺点,但总体上具有精度不高或防弹性能不好等缺点。
3.最早的实弹报靶方法是做成分区导电检测的形式,靶子有前后两面,都为导电的铝膜或导电橡胶皮,当子弹穿过靶面时接通两面,产生一个短路脉冲,通过接通不同的环区和方位,经信号处理输出子弹打在靶上的环数和方位。该方法是精度低,子弹密集部位容易将导电层被打脱落,就不能继续工作了。
4.当前较为多见的是激波(超声波)报靶形式。该方法是在靶面下方布设了几个激波探头,当子弹飞行时会产生激波,这些探头能探测到子弹产生的激波,通过计算处理激波到达各个探头的时间差,即可获得子弹在靶面上的位置坐标,从而进行报靶输出。该方法是结构简单,但是精度不高,也不能进行低速子弹的报靶。
5.近年来在光学报靶方面出现了一些相关产品,具体方法是在靶面区域前方布设一个交叉光幕,当子弹穿过靶面时,将对光幕有遮挡,通过检测被遮挡的的位置,经过相应的计算处理,即可获知子弹在光幕中对应的位置坐标,进而给出靶面上的弹孔位置,实现报靶。现有的光学报靶样式有如《基于光敏管阵列激光靶的算法设计及应用》(《工艺技术与职业教育》2020年3月)介绍的结构,为水平和垂直方向正交布局,通过检测子弹产生阴影的位置,推算出相应的子弹位置坐标。另一种常见的光学报靶样式如专利《cn111811326a激光靶、激光l形光幕智能报靶系统及其报靶方法》,该方法设计了两组激光发射和接收装置,一个激光点和对角的l形组成一个角度测量的装置,探测到子弹的遮挡光幕产生阴影的一个方位。另一组装置则探测另一个方位,将两个方位数据合在一个平面内,再通过整个装置的物理尺寸大小,计算出子弹正入射时在靶面的坐标位置。所有的光学报靶方法中,光源和检测元件分别布设在靶面的四周,不能放置在一侧,需要形成一个完整的框体,暴露在空中的部分易被子弹击中,需要对整个框体进行防弹处理,导致整体设备笨重、造价高,也不便于安装使用。
6.在当前的激波或光学报靶设备中,传感器所在的检测平面和靶纸平面有一定的距离,不能重合,工作时假设子弹垂直靶面和检测面正入射,按检测面坐标正投影到靶纸上换算射击成绩。因此当子弹不是正对靶面斜射时,检测面所得出的坐标和靶面坐标就会有偏差,这种偏差有时会达到几个毫米,这么大的误差会导致靠近环线边缘的弹孔产生环数成绩的错误等问题,这是非常重要而又苦于无法解决的难题。如附图2所示,传感器检测面t1
到靶纸面t的距离为d,通常认为子弹是垂直射入靶面,因此可将子弹在t1面中ps点的位置坐标当作靶面上弹孔位置。但是当子弹和靶面垂线有夹角为a时,产生的弹孔坐标误差为e:e=d*tan(a)。常见的尺寸d大约为40mm左右。假设按d=40mm,子弹偏角a=5
°
,则误差e为:e=d*tan(a)=40*tan(5
°
)=3.5mm。这样的偏差是比较大的,在略有一定精度要求时,就会导致射手的射击成绩出错,例如8环的弹孔变成了7环的成绩,因此不能满足使用要求。即使射手射击方向正确,但是由于靶体设备放置的方向不准,没有完全正对射手,同样会产生上述的偏角误差问题。
技术实现要素:
7.本发明的目的在于提出一种空间布阵传感器的无框型光电靶及其实弹报靶方法。
8.实现本发明目的的技术解决方案为:一种无框型光电靶,包括防弹板、总控盒、底板、测角传感器、照明光源、靶板和靶纸,其中:
9.所述底板位于整体装置的下方,防弹板、总控盒、测角传感器和照明光源安装在底板上,防弹板和靶纸的靶面分别位于底板的两侧,总控盒、测角传感器、照明光源位于防弹板和靶面之间,防弹板上边缘高于底板上的工作部件,起保护作用;
10.所述测角传感器为四个,照明光源为两个,两个测角传感器和一个照明光源形成一组探测单元,形成一个检测面,两组探测单元分别构成检测面和后检测面,两个检测面和靶纸靶面互相平行;当子弹以空间直线为轨迹依次穿过各检测面时,被对应光源照亮,同时两个测角传感器探测子弹相对各自光轴的偏角,发送给总控盒计算子弹穿过该检测面的交点位置,进而结合空间位置关系,计算靶面上的弹孔的坐标。
11.进一步的,所述总控盒内包含主控电路板和信号接口电路板,其中主控电路板和照明光源通过电缆相联接,驱动光源发光,主控电路板和测角传感器通过电缆线相联接,采集测角传感器所获得的测角信号数据,主控电路板对采集到的测角信号进行处理和运算,得到子弹射击后靶面上弹孔的位置坐标数据,通过接口电路板经信号电缆和上位机进行传输,在上位机上进行报靶显示、记录射击成绩。
12.进一步的,所述测角传感器包含传感器镜头、传感器壳体、内部固定螺钉、隔圈、传感器芯片、芯片底板和传感器固定螺钉,在传感器壳体上方胶结有传感器镜头,传感器壳体空腔内通过隔圈和内部固定螺钉将芯片底板固定;在芯片底板上搭载联接有传感器芯片,芯片底板下方焊接有引线和总控盒相联,发送传感器采集到的信号;测角传感器通过底部的两个传感器固定螺钉安装在底板上。
13.更进一步的,所述传感器芯片选择psd类型,通过光电信号的转换处理,获得成像光点在芯片上的位置数据。
14.进一步的,所述照明光源包含有光源窗口玻璃、激光器、光源壳体和光源固定螺钉,其中激光器通过卡接或压接安装在光源壳体中,焊接引脚穿过相应的小孔,在下方的空腔内再焊接导线,该导线经过光源壳体上的走线孔和和总控盒相联;光源壳体上方通过胶结方式固定窗口玻璃;照明光源通过底部的两个光源固定螺钉安装在底板上。
15.更进一步的,所述激光器为半导体激光器,其发光具有散射的特性,所发散的激光通过窗口玻璃以一定的角度向上照射。
16.更进一步的,所述激光器替换为单个led或者led阵列。
17.一种实弹报靶方法方法,基于所述的无框型光电靶实现实弹报靶,当子弹以空间直线为轨迹依次穿过两个检测面和靶面时,利用测角传感器和照明光源确定子弹与两个检测面的交点坐标,再通过空间位置关系计算靶面上的弹孔的坐标。
18.本发明与现有技术相比,其显著优点为:1)通过将光电测角传感器设计为空间立体布局结构,通过对子弹飞行的空间轨迹探测,有效地解决了子弹斜入射靶面时带来的误差问题,提高了整体设备装置的报靶精度。2)将照明光源、测角传感器等部件均设计在靶面的下方一侧,无需在靶面周围的空间形成包含工作部件的框体,简化了整体的结构,没有空中设备的防弹要求,大大提高了整机的工作安全性和可靠性,减少了设备在使用中的维护工作量。
附图说明
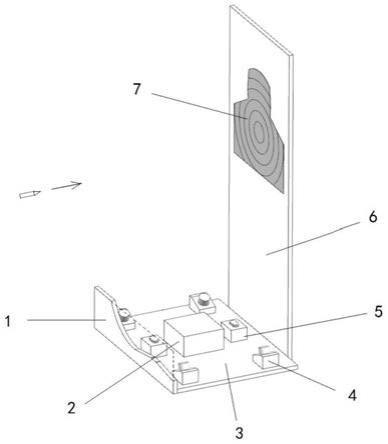
19.图1为本装置整体示意图。
20.图2为单检测面形成的误差示意图。
21.图3为两个检测面示意、弹孔和两个检测面上弹丸所在位置关系。
22.图4为两组传感器的空间布局。
23.图5为一组传感器组成的检测面。
24.图6为一个检测面内的弹丸位置关系计算示意图。
25.图7为在高度y方向上精确计算弹孔坐标示意图。
26.图8为在水平x方向上精确计算弹孔坐标示意图。
27.图9为照射光源构成。
28.图10为测角传感器构成。
29.图11为系统信号联接图。
30.图12为本装置简图。
31.附图序号:
32.1防弹板,2总控盒,3底板,4测角传感器,5照明光源,6靶板,7靶纸,2
‑
1主控电路板,2
‑
2信号接口电路板,2
‑
3信号电缆,4
‑
1传感器镜头,4
‑
2传感器壳体,4
‑
3内部固定螺钉,4
‑
4隔圈,4
‑
5传感器芯片,4
‑
6芯片底板,4
‑
7传感器固定螺钉,5
‑
1光源窗口玻璃,5
‑
2激光器,5
‑
3光源壳体,5
‑
4光源固定螺钉。附图标识字符:
33.t
‑
靶纸靶面,t1
‑
检测面,t2
‑
后检测面,p
‑
靶纸面弹孔,ps
‑
检测面中子弹位置,a
‑
子弹和靶面垂线的夹角,e
‑
子弹斜射产生的偏差,d
‑
检测面到靶纸面的距离,d
‑
检测面和后检测面间的距离,h
‑
靶纸面上的弹孔,h1
‑
检测面中子弹的位置,h2
‑
后检测面中子弹的位置,l
‑
检测面中左测角传感器基准点,m
‑
左测角传感器的光轴,r
‑
检测面中右测角传感器基准点,n
‑
右测角传感器的光轴,al
‑
子弹与左光轴m的夹角,ar
‑
子弹与右光轴n的夹角,g
‑
检测面中子弹到坐标横轴的投影点,x1为子弹在检测面中横向坐标,y1
‑
子弹在检测面中的高度坐标,f
‑
在ozy1y2平面中h1点在t2平面的投影点,e
‑‑
在ozy1y2平面中h1点在t平面的投影点,j
‑
在ozx1x2平面中h1点在t2平面的投影点,k
‑
在ozx1x2平面中h1点在t平面的投影点,w
‑
照明光源的光束散射角,u
‑
某一子弹形成的亮点,u
‑
子弹亮点u相对光轴n的夹角,v
‑
某一子弹形成的亮点,v
‑
子弹亮点v相对光轴n的夹角。
具体实施方式
34.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
35.如附图1所示,无框型光电靶,包含防弹板1、总控盒2、底板3、测角传感器4、照明光源5、靶板6和靶纸7等,其传感器等部件都位于整体装置的下方,且传感器等部件采用空间立体布局,整体布局为无框型结构,具体如下:
36.总控盒2、测角传感器4和照明光源5等都安装在底板3上,防弹板1和靶面分别位于底板的前后两侧,防弹板在最前方,迎着子弹射来的位置。
37.靶板6为木板或泡沫塑料板等材质,可以承受子弹的多次穿透射击,主要功能为支撑和贴挂靶纸作用。
38.防弹板1为坚固的装甲钢板等材质,可挡住子弹的射击。防弹板1上边缘高于底板3上的工作部件,当子弹从左侧射来,射向靶面时,若有位置较低的子弹则被防弹板挡住,避免了底板3上的工作部件受损。
39.在附图4所示的结构布局中,两个测角传感器和一个照明光源形成一组探测单元,形成一个检测面,能独立检测出子弹在所在平面的坐标位置。两组探测单元分别构成检测面t1和后检测面t2。t1和t2两个面和靶纸靶面t互相平行。两个检测面相距为d,检测面t1到靶纸靶面t的距离为d。
40.如附图3所示,在靶面t、检测面t1和后检测面t2的位置分别建立直角坐标系oxyz、o1x1y1z1和o2x2y2z2,三个坐标系z轴重合,即z1、z2和z共轴。三个面间距分别为d和d,如前述。子弹以空间直线为轨迹依次穿过t2、t1和t,三个交点分别为h2、h1和h。当两个检测面分别获得到h2和h1的坐标时,通过本装置的空间位置关系即可计算出靶面t上精确的弹孔h的坐标,无论子弹以何种方向的斜射。
41.在检测面t1内,如附图5所示建立平面坐标系o1x1y1。以左右两个测角传感器4的光心(所测量角度的基准点)连线为x轴,向右为正。此两个光心连线中间点o1为原点,向上平行靶面t方向为y1轴。
42.照明光源5中的发光器件为激光器或led灯,向上方以散射角w进行发光照射,只需要靶形区域位于散射角w内即可。
43.当子弹穿过t1面时,被光源照亮。对于两个测角传感器来说,子弹表现为一个亮点,该亮点被测角传感器探测到,即可检测出该亮点相对各自光轴的偏角al和ar。其中al为子弹亮点相对左侧测角传感器光轴m的夹角,ar为子弹亮点相对右侧测角传感器光轴n的夹角。
44.在附图6中,两个测角传感器的基准点l和r间距为c,在装置中是定值常量。在检测面t1内建立坐标系o1x1y1,其中x1轴通过l和r点,坐标原点o1为线段lr的中点,经o1向上直线为y1轴。
45.两个测角传感器的基准点分别为l和r,各自的光轴分别为m和n,测角传感器的功能即是探测目标亮点和光轴之间的夹角。子弹穿过t1检测面的交点位置为h1,子弹在h1的位置上产生的亮点,被两个测角传感器探测到,其夹角分别为al和ar。角度al和ar为有方向的值,当光点位于光轴的左侧则角度为负值,反之为正值。在附图6中al为负值,ar为正值。
光轴m、n和x1轴的夹角为a,是常量定值。
46.在坐标系o1x1y1中,子弹h1位置的坐标为(x1,y1),h1点在横轴o1x1上的投影点为g,因此点g的坐标为(x1,0)。
47.在三角形lgh1中:
48.h1g=lg*tan(∠h1lg)
49.=lg*tan(a
‑
al)
50.∴lg=h1g/tan(a
‑
al)
51.同样,在三角形rgh1中:
52.h1g=rg*tan(∠h1rg)
53.=rg*tan(a ar)
54.∴rg=h1g/tan(a ar)
55.∵lg rg=lr=c
56.即h1g/tan(a
‑
al) h1g/tan(a ar)=c
57.可得:
[0058][0059][0060]
综上,可知子弹h1位置在检测面t1内的坐标为(x1,y1)为:
[0061][0062][0063]
通过上述计算,即获得了子弹在t1面内的准确坐标。
[0064]
同理,采集t2检测面内的两个测角传感器信号,通过处理可获得子弹光点h2在该面内的位置坐标(x2,y2)。
[0065]
对于已知子弹轨迹直线上的两点位置:h1(x1,y1)和h2(x2,y2),即可确定该直线在空间的准确状态。
[0066]
通过将该轨迹直线在高度方向和水平方向上的投影关系,可计算该直线和靶面平面的交点坐标h(x,y)。
[0067]
在所示附图7中,从侧面看子弹轨迹直线,反映高度方向的情况。子弹轨迹直线和靶面t交点为h,经过h1点作辅助线fe,fe平行于z轴,在平面t和t2上的交点分别为e和f。两
个三角形
△
h1fh2和
△
h1eh相似,且为直角三角形。由相似关系得:
[0068]
he=h2f*(d/d)
[0069]
=(y1
–
y2)*(d/d)
[0070]
在靶面中的高度坐标y为:
[0071]
y=y1 he
[0072]
=y1 (y1
–
y2)*(d/d)
[0073]
此值即为靶面t上最终弹孔位置的高度方向的y坐标值。
[0074]
同理在附图8中,求解得靶面t上最终弹孔位置的水平方向的x坐标值:
[0075]
x=x1 (x1
–
x2)*(d/d)
[0076]
综上,可知子弹最终在靶面t上的精确坐标为(x,y)为:
[0077]
x=x1 (x1
–
x2)*(d/d)
[0078]
y=y1 (y1
–
y2)*(d/d)
[0079]
通过靶面的弹孔精确位置,再对应靶形上的环数、方位等形状大小,即可完成精确的实弹射击报靶。
[0080]
在附图9中,表示了照明光源5的内部结构。照明光源部件包含有光源窗口玻璃5
‑
1、激光器5
‑
2、光源壳体5
‑
3和光源固定螺钉5
‑
4等,激光器5
‑
2通过卡接或压接等方式安装在光源壳体5
‑
3中,焊接引脚穿过相应的小孔,在下方的空腔内再焊接导线,该导线经过壳体上的走线孔和和总控盒相联。上方通过胶结方式固定窗口玻璃5
‑
1。激光器为半导体激光器,发光具有散射的特性,发散的激光通过窗口玻璃以一定的角度w向上照射。在本发明中,照射光源除了可以采用半导体激光器作为发光光源外,还可以采用led作为光源,可以实现相同功能。led相比激光器的功率密度稍低,需要采用大功率管或将多个led或光源组成阵列,以达到激光器同等的照明效果。照明光源通过底部的两个光源固定螺钉5
‑
4安装在底板3上。
[0081]
在附图10中,表示了测角传感器的内部结构。测角传感器4包含了传感器镜头4
‑
1、传感器壳体4
‑
2、内部固定螺钉4
‑
3、隔圈4
‑
4、传感器芯片4
‑
5、芯片底板4
‑
6和传感器固定螺钉4
‑
7等。在测角传感器的上方胶结有传感器镜头4
‑
1。空腔内通过隔圈4
‑
4和内部固定螺钉4
‑
3将芯片底板4
‑
6固定,在芯片底板4
‑
6上搭载联接有传感器芯片4
‑
5。芯片底板4
‑
6下方焊接有引线和总控盒相联,发送传感器采集到的信号。在测角传感器前方,当出现一个亮点u时,该亮点的光通过传感器镜头4
‑
1成像汇聚在传感器芯片4
‑
5上形成一个像点,经过光电转换,可得到传感器芯片上4
‑
5该像点的位置数据,通过换算处理,能得出对应的该光点相对光轴n的夹角u。同理,当光点出现在v处,则测角传感器能探测到相应的信号,得出夹角v的大小。测角传感器4通过底部的两个传感器固定螺钉4
‑
7安装在底板3上。该传感器芯片优选psd类型,可以通过光电信号的转换处理,获得成像光点在芯片上的位置数据。
[0082]
如附图11所示,底板3上安装了总控盒2,总控盒2内包含了主控电路板2
‑
1和信号接口电路板2
‑
2。总控盒2和两侧的测角传感器4和照明光源5由电缆线相联。主控电路板2
‑
1和照明光源5通过电缆相联接,驱动光源发光。主控电路板2
‑
1和测角传感器由电缆线相联,采集测角传感器4所获得的测角信号数据。主控电路板2
‑
1对采集到的测角信号进行处理和运算,得到最终的子弹射击后靶面上弹孔的位置坐标数据。该数据通过接口电路板2
‑
2经信号电缆2
‑
3和上位机(电脑)进行传输,即可在上位机(电脑)等设备上进行报靶显示、记录射
击成绩等。
[0083]
综上所述,本发明无框型光电靶装置,传感器采用空间立体布局,能对子弹在靶面前方的空间轨迹进行检测采集,进而精确计算出子弹在靶纸面上的弹孔坐标位置,消除了传感器检测面和靶面不重合带来的误差问题。同时将所有工作器件全部布置在下方一侧,不需要形成一个框体就能报靶工作,靶面周围无需进行防弹设计,只需针对将下方的一侧进行防弹即可。
[0084]
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0085]
以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。