1.本发明属于自动化设备技术领域,涉及一种安装设备,尤其涉及一种隧道漏缆支架钻孔及膨胀螺栓安装智能装备。
背景技术:
2.随着铁路运输的快速发展,铁路隧道长度及数量急剧增加。根据2019年底的数据统计,中国铁路营业里程达13.9万km,铁路隧道总长已到达18 041km(16 084座),其中,2019年新增开通运营线路铁路隧道总长1 710km(967座)。此外,在建铁路隧道总长6 419km(2 950座),规划铁路隧道总长16 326km(6 395座)。隧道成为铁路建设投资最大、工期最长的环节之一。为满足铁路移动通信的需求,需要在铁路隧道侧壁敷设通信漏缆。
3.根据漏缆架设工艺要求,需在2.1m-2.6m、4.5m-4.8m高度,并依次完成钻孔、埋设膨胀螺丝,安装漏缆支架等工作内容,为提高漏缆安装强度,支架间距宜为1m。
4.目前施工方式主要为人工方式,以上工作一般为6-8人一组(见图1),以梯子或脚手架为登高工具,全部为人工手动作业。当前施工方式存在效率低、劳动强度大、作业环境恶劣(湿度大、粉尘多)、登高作业风险、钻孔和安装质量人为因素多的问题,其制约着铁路隧道漏缆工程施工效率及质量。
5.随着铁路隧道里程逐年增加,人工费用越来越高,年轻人不愿从事野外艰苦环境工作。国内其他一些工程单位和科研机构也有提出过一些钻孔原理设备,但都无法自主运行,且功能单一,仅能打孔,还需人工二次作业,工程应用意义不大。因此,如何采用智能化设备,实现漏缆支架钻孔及膨胀螺栓安装自动化,进一步提升铁路隧道漏缆施工技术水平,是一个迫切需要解决的问题。
6.有鉴于此,如今迫切需要设计一种新的隧道漏缆支架辅助安装设备,以便克服现有安装方式存在的上述至少部分缺陷。
技术实现要素:
7.本发明提供一种隧道漏缆支架钻孔及膨胀螺栓安装智能装备,可提高作业效率,改善钻孔和安装的一致性,提高作业质量;改善野外作业人员的工作环境和作业强度。
8.为解决上述技术问题,根据本发明的一个方面,采用如下技术方案:
9.一种隧道漏缆支架钻孔及膨胀螺栓安装智能装备,所述智能装备包括:移动平台、发电机、稳压器、空压机、可旋转悬臂、六轴工业机器人、供料系统、机器人末端执行单元;
10.所述移动平台能承载所述发电机、稳压器、空压机、可旋转悬臂、六轴工业机器人、供料系统、机器人末端执行单元;
11.所述移动平台设有驱动电机及行走轮,所述驱动电机能驱动行走轮沿铁轨运行;所述移动平台上安装有编码器,行走轮设有角度传感器,所述角度传感器能感应行走轮设定位置的实时角度,从而能判断行走轮转动的圈数,从而能得到移动平台的移动距离;
12.所述发电机为整套智能装备提供动力,所述稳压器连接所述发电机,为所述智能
装备提供稳定输入电压;
13.所述空压机连接机器人末端执行单元,能为机器人末端执行单元各执行机构提供压缩空气;
14.所述供料系统包括定位料盘,定位料盘的设定区域设置膨胀螺丝,所述供料系统为所述智能装备提供膨胀螺丝,由人工在定位料盘按照要求码放,并将整盘膨胀螺丝按要求放置于所述供料系统;
15.所述可旋转悬臂可旋转地设置于所述移动平台,所述可旋转悬臂的悬臂能悬出移动平台车体外;
16.所述机器人末端执行单元包括伺服模组、隧道壁距离检测机构、v型导轨、打孔机构、吹灰机构、拧紧机构、锤击机构、安装机构及取料机构;
17.所述六轴工业机器人能从供料系统拾取膨胀螺丝,并靠近隧道岩壁;隧道壁距离检测机构设有弹性机构、检测杆及检测开关;当机器人末端执行单元中的隧道壁距离检测机构靠近隧道岩壁设定距离,隧道壁距离检测机构中的弹性机构压缩所述检测杆,触发检测隧道壁距离检测机构末端的检测开关,六轴工业机器人停止动作;
18.所述机器人末端执行单元中各机构依次完成打孔、吹灰、安装膨胀螺丝、锤击膨胀螺丝、拧紧螺母工作;
19.所述v型导轨用以在切换工具时提供导向和支承作业;所述打孔机构、吹灰机构、拧紧机构、锤击机构、安装机构、取料机构能在所述伺服模组的驱动下沿v型导轨移动;
20.所述伺服模组包括气缸;所述打孔机构包括钻头、深度检测单元;所述吹灰机构包括吹气管;
21.打孔时,伺服模组通过气缸推动打孔机构伸出,钻头接触岩壁,并钻孔,深度检测单元检测钻孔深度达到设定深度时,有检测开关检测到位,气缸退回,打孔完成;
22.吹灰时,打孔完成后,伺服模组通过气缸推动吹灰机构伸出,吹气管伸进孔内,压缩空气接通,实现吹灰;气缸退出,压缩空气断开,吹灰完成;
23.安装膨胀螺钉时,伺服模组通过气缸推动安装机构伸出,膨胀螺钉接触岩壁,系统启动锤击机构,将膨胀螺钉锤入岩壁,安装至设定深度时,到位检测开关检测到位,膨胀螺钉锤入工具停止,气缸退回,膨胀螺钉安装完成;
24.拧紧螺母时,气缸推动拧紧机构伸出,拧紧机构受压力自动启动,拧紧螺母,达到设定扭矩时,拧紧工具自动停止,气缸退回,螺母拧紧完成;
25.完成作业后,伺服模组返回至零点位置,隧道岩壁打孔及装配工作完成,六轴工业机器人退回;移动平台行驶设定距离停止,六轴工业机器人和末端执行单元各机构重复上述动作,继续完成打孔安装工作。
26.根据本发明的另一个方面,采用如下技术方案:
27.一种隧道漏缆支架钻孔及膨胀螺栓安装智能装备,所述智能装备包括:移动平台、供电装置、可旋转悬臂、工业机器人、供料系统;所述移动平台能承载所述供电装置、可旋转悬臂、工业机器人、供料系统;
28.所述移动平台设有行走机构,所述行走机构能驱动所述移动平台沿设定轨道运行;所述供电装置分别连接各用电装置,为其提供工作所需的电能;
29.所述可旋转悬臂可旋转地设置于所述移动平台,所述可旋转悬臂的悬臂能悬出移
动平台车体外;
30.所述工业机器人设置于所述可旋转悬臂,所述工业机器人包括执行装置,所述供料系统靠近执行装置设置。
31.作为本发明的一种实施方式,所述执行装置包括打孔机构、吹灰机构、安装装置、取料机构。
32.作为本发明的一种实施方式,所述执行装置还包括伺服模组、隧道壁距离检测机构、v型导轨,所述安装装置包括拧紧机构、锤击机构及安装机构;
33.所述工业机器人能从供料系统拾取膨胀螺丝,并靠近隧道岩壁;当执行装置中的隧道壁距离检测机构靠近隧道岩壁设定距离,压缩检测机构中的检测杆出发检测开关后,工业机器人停止动作;
34.所述执行装置中各机构依次完成打孔、吹灰、安装膨胀螺丝、锤击膨胀螺丝、拧紧螺母工作。
35.作为本发明的一种实施方式,所述v型导轨用以在切换工具时提供导向和支承作业;所述打孔机构、吹灰机构、拧紧机构、锤击机构、安装机构、取料机构能在所述伺服模组的驱动下沿v型导轨移动;
36.所述伺服模组包括气缸;所述打孔机构包括钻头、深度检测单元;所述吹灰机构包括吹气管;
37.打孔时,系统自动启动打孔机构,气缸推动打孔机构伸出,钻头接触岩壁,并钻孔,深度检测单元检测钻孔深度达到设定深度时,有检测开关检测到位,气缸退回,打孔完成;
38.吹灰时,打孔完成后,伺服模组通过气缸推动吹灰机构伸出,吹气管伸进孔内,压缩空气接通,实现吹灰;气缸退出,压缩空气断开,吹灰完成;
39.安装膨胀螺钉时,伺服模组通过气缸推动安装机构伸出,膨胀螺钉接触岩壁,系统启动锤击机构,将膨胀螺钉锤入岩壁,安装至设定深度时,到位检测开关检测到位,膨胀螺钉锤入工具停止,气缸退回,膨胀螺钉安装完成;
40.拧紧螺母时,气缸推动拧紧机构伸出,拧紧机构受压力自动启动,拧紧螺母,达到设定扭矩时,拧紧工具自动停止,气缸退回,螺母拧紧完成;
41.作为本发明的一种实施方式,完成作业后,伺服模组返回至零点位置,隧道岩壁打孔及装配工作完成,工业机器人退回;移动平台行驶设定距离停止,工业机器人和末端执行单元各机构重复上述动作,继续完成打孔安装工作。
42.作为本发明的一种实施方式,所述供电装置包括发电机、稳压器;
43.所述发电机为整套智能装备提供动力,所述稳压器连接所述发电机,为所述智能装备提供稳定输入电压。
44.作为本发明的一种实施方式,所述智能装备还包括空压机;所述空压机连接执行装置,能为执行装置各执行机构提供压缩空气。
45.作为本发明的一种实施方式,所述移动平台设有驱动电机及行走轮,所述驱动电机能驱动行走轮沿铁轨运行;所述移动平台上安装有编码器,行走轮设有角度传感器,所述角度传感器能感应行走轮设定位置的实时角度,从而能判断行走轮转动的圈数,从而能得到移动平台的移动距离。
46.作为本发明的一种实施方式,所述移动平台上安装有加速度传感器、速度计算模
块及距离计算模块;
47.所述加速度传感器用以测量移动平台的实时加速度;
48.所述速度计算模块用以根据所述加速度传感器感应的数据计算移动平台的实时移动速度;
49.所述距离计算模块用以根据所述速度计算模块获得的实时移动速度计算移动平台的移动距离。
50.本发明的有益效果在于:本发明提出的隧道漏缆支架钻孔及膨胀螺栓安装智能装备,可提高作业效率,改善钻孔和安装的一致性,提高作业质量;改善野外作业人员的工作环境和作业强度。本发明可填补在铁路施工领域隧道漏缆钻孔及膨胀螺栓安装作业智能化装备工程实际应用的空白,为进一步研发完善积累了实际的工程经验。
附图说明
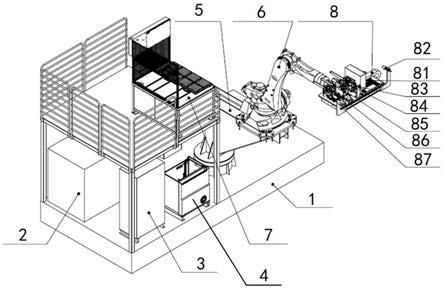
51.图1为本发明一实施例中隧道漏缆支架钻孔及膨胀螺栓安装智能装备的结构示意图。
具体实施方式
52.下面结合附图详细说明本发明的优选实施例。
53.为了进一步理解本发明,下面结合实施例对本发明优选实施方案进行描述,但是应当理解,这些描述只是为进一步说明本发明的特征和优点,而不是对本发明权利要求的限制。
54.该部分的描述只针对几个典型的实施例,本发明并不仅局限于实施例描述的范围。相同或相近的现有技术手段与实施例中的一些技术特征进行相互替换也在本发明描述和保护的范围内。
55.说明书中的“连接”既包含直接连接,也包含间接连接。
56.本发明揭示了一种隧道漏缆支架钻孔及膨胀螺栓安装智能装备,所述智能装备包括:移动平台、供电装置、可旋转悬臂、工业机器人、供料系统;所述移动平台能承载所述供电装置、可旋转悬臂、工业机器人、供料系统;所述移动平台设有行走机构,所述行走机构能驱动所述移动平台沿设定轨道运行;所述供电装置分别连接各用电装置,为其提供工作所需的电能。所述可旋转悬臂可旋转地设置于所述移动平台,所述可旋转悬臂的悬臂能悬出移动平台车体外;所述工业机器人设置于所述可旋转悬臂,所述工业机器人包括执行装置,所述供料系统靠近执行装置设置。在一实施例中,所述执行装置包括打孔机构、吹灰机构、安装装置、取料机构。
57.图1为本发明一实施例中隧道漏缆支架钻孔及膨胀螺栓安装智能装备的结构示意图;请参阅图1,在本发明的一实施例中,所述智能装备包括:移动平台1、发电机2、稳压器3、空压机4、可旋转悬臂5、六轴工业机器人6、供料系统7、机器人末端执行单元8。机器人末端执行单元8可以作为六轴工业机器人6的一部分,两者也可以单独设置。所述移动平台1能承载所述发电机2、稳压器3、空压机4、可旋转悬臂5、六轴工业机器人6、供料系统7、机器人末端执行单元8。
58.所述移动平台1设有驱动电机及行走轮,所述驱动电机能驱动行走轮沿铁轨运行;
所述移动平台1上安装有编码器,用以测量移动平台的移动距离。
59.在一实施例中,行走轮设有角度传感器,所述角度传感器能感应行走轮设定位置的实时角度,从而能判断行走轮转动的圈数,从而能得到移动平台的移动距离。在一实施例中,编码器上装有周长为200mm的滚轮与铁轨接触,移动平台沿着铁轨行走时,编码器依据滚轮旋转圈数或者角度数据,测量计算移动平台的移动距离。
60.在一实施例中,所述移动平台1上安装有加速度传感器、速度计算模块及距离计算模块。所述加速度传感器用以测量移动平台的实时加速度;所述速度计算模块用以根据所述加速度传感器感应的数据计算移动平台的实时移动速度;所述距离计算模块用以根据所述速度计算模块获得的实时移动速度计算移动平台的移动距离。
61.所述发电机2为整套智能装备提供动力,所述稳压器3连接所述发电机2,为所述智能装备提供稳定输入电压。所述空压机4连接机器人末端执行单元8,能为机器人末端执行单元8各执行机构提供压缩空气。
62.所述供料系统7包括定位料盘,定位料盘的设定区域设置膨胀螺丝,所述供料系统为所述智能装备提供膨胀螺丝,由人工在定位料盘按照要求码放,并将整盘膨胀螺丝按要求放置于所述供料系统7。
63.所述可旋转悬臂5可旋转地设置于所述移动平台1,所述可旋转悬臂5的悬臂能悬出移动平台1车体外。
64.所述机器人末端执行单元8包括伺服模组81、隧道壁距离检测机构82、v型导轨、打孔机构83、吹灰机构84、拧紧机构85、锤击机构86、取料机构87(还可以包括安装机构)。
65.所述六轴工业机器人6能从供料系统7拾取膨胀螺丝,并靠近隧道岩壁;隧道壁距离检测机构82设有弹性机构、检测杆及检测开关;当机器人末端执行单元8中的隧道壁距离检测机构82靠近隧道岩壁设定距离,隧道壁距离检测机构82中的弹性机构压缩所述检测杆,触发检测隧道壁距离检测机构末端的检测开关,六轴工业机器人6停止动作。
66.所述机器人末端执行单元8中各机构依次完成打孔、吹灰、安装膨胀螺丝、锤击膨胀螺丝、拧紧螺母工作。
67.所述v型导轨用以在切换工具时提供导向和支承作业;所述打孔机构83、吹灰机构84、拧紧机构85、锤击机构86、安装机构、取料机构87能在所述伺服模组81的驱动下沿v型导轨移动。
68.所述伺服模组包括气缸;所述打孔机构包括钻头、深度检测单元;所述吹灰机构包括吹气管。
69.打孔时,系统自动启动打孔机构,气缸推动打孔机构伸出,钻头接触岩壁,并钻孔,深度检测单元检测钻孔深度达到设定深度时,有检测开关检测到位,气缸退回,打孔完成。
70.吹灰时,打孔完成后,伺服模组通过气缸推动吹灰机构伸出,吹气管伸进孔内,压缩空气接通,实现吹灰;气缸退出,压缩空气断开,吹灰完成。
71.安装膨胀螺钉时,伺服模组通过气缸推动安装机构伸出,膨胀螺钉接触岩壁,系统启动锤击机构,将膨胀螺钉锤入岩壁,安装至设定深度时,到位检测开关检测到位,膨胀螺钉锤入工具停止,气缸退回,膨胀螺钉安装完成。
72.拧紧螺母时,气缸推动拧紧机构伸出,拧紧机构受压力自动启动,拧紧螺母,达到设定扭矩时,拧紧工具自动停止,气缸退回,螺母拧紧完成。
73.完成作业后,伺服模组81返回至零点位置,隧道岩壁打孔及装配工作完成,六轴工业机器人6退回;移动平台1行驶设定距离停止,六轴工业机器人6和末端执行单元8各机构重复上述动作,继续完成打孔安装工作。
74.综上所述,本发明提出的隧道漏缆支架钻孔及膨胀螺栓安装智能装备,可提高作业效率,改善钻孔和安装的一致性,提高作业质量;改善野外作业人员的工作环境和作业强度。本发明可填补在铁路施工领域隧道漏缆钻孔及膨胀螺栓安装作业智能化装备工程实际应用的空白,为进一步研发完善积累了实际的工程经验。
75.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
76.这里本发明的描述和应用是说明性的,并非想将本发明的范围限制在上述实施例中。实施例中所涉及的效果或优点可因多种因素干扰而可能不能在实施例中体现,对于效果或优点的描述不用于对实施例进行限制。这里所披露的实施例的变形和改变是可能的,对于那些本领域的普通技术人员来说实施例的替换和等效的各种部件是公知的。本领域技术人员应该清楚的是,在不脱离本发明的精神或本质特征的情况下,本发明可以以其它形式、结构、布置、比例,以及用其它组件、材料和部件来实现。在不脱离本发明范围和精神的情况下,可以对这里所披露的实施例进行其它变形和改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
