1.本发明涉及空中交通管制技术领域,具体涉及一种高机动试飞航空器实时智能防相撞检测方法。
背景技术:
2.在公共空域和科研试飞空域之间存在距离较近的情况下,高机动航空器试飞活动常常容易触发民航空管系统的冲突预警功能,提示航空器之间存在相撞危险。而实际上由于试飞空域活动的是高机动航空器,在短期内这些航空器机动性强,转弯速度快,按照计划航线航行不会有冲突发生。但是由于当前防相撞检测算法通常采用线性外推算法实现,因此会产生大量虚警信息。这些虚警信息不仅给民航管制员带来了大量的工作负担,同时也干扰了科研试飞工作的正常进行。针对此问题,通常需要机场和科研试飞单位等多方签订管制协议,以民航航班优先飞行为原则,通过调整试飞航空器活动空域确保公共空域航空器航行安全,即当公共空域中有航空器活动时,停止距离公共空域较近的试飞空域进行试飞活动。显然,这种方式严重影响了科研试飞活动的效率。因此,通过提高防相撞探测精度等技术手段,增强高机动航空器防相撞检测能力成为了保障科研试飞工作安全高效进行的关键。
3.在现有技术中,防相撞探测技术由轨迹预测和防相撞探测判定等两个部分组成。准确的轨迹预测技术是提高防相撞探测准确率的关键。常用的轨迹预测方法包括基于动力学和运动学模型的轨迹估算方法和基于数据驱动的轨迹估算方法。其中动力学模型需要对于航空器的各项参数指标和气象条件有精准的掌握。在轨迹预测模型中,基于动力学和运动学模型的轨迹估算方法需要大量准确参数,在试验飞行时通常难以获取准确的各项参数信息,因此难以构建有效的轨迹估算模型。
4.数据驱动方法包括卡尔曼滤波、隐马尔可夫、线性回归预测算法等,但是由于试验飞行航空器机动性强、试飞科目多、运动轨迹复杂,大部分数据驱动模型难以有效捕捉到高机动航空器运动模式。特别是对于高机动航空器多步轨迹的预测,航空器轨迹预测方法通常是基于当前状态,通过滚动预测的方式递推预测未来多步航行轨迹。但是这种滚动预测方式容易产生误差累积,无法一次给出多步轨迹预测结果。此外,在试飞活动中,试飞科目对于高机动航空器的轨迹估算影响较大,但常规轨迹估算方法中并没有设计特殊模块进行有效提取。总之,现有技术中单步滚动预测飞行目标轨迹方式中,容易产生误差累积的缺陷,高机动试飞航空器轨迹估算的准确度较低。
技术实现要素:
5.针对现有技术中的缺陷,本发明提供一种高机动试飞航空器实时智能防相撞检测方法,以达到不易产生误差累积,提高估算准确度高的作用。
6.为解决上述的技术问题,本发明采用以下技术方案:
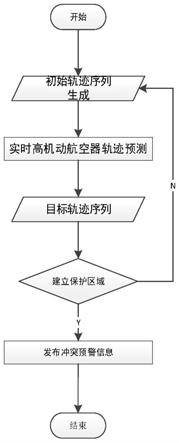
7.一种高机动试飞航空器实时智能防相撞检测方法,包括以下步骤:
8.步骤100:生成航空器实际起飞经过n个雷达周期积累产生的初始轨迹序列;
9.步骤200:经过实时高机动航空器轨迹预测后形成目标轨迹预测模型,目标轨迹预测模型的训练过程依次为数据预处理、特征选择、标签标注和模型训练,通过目标轨迹预测模型对高机动航迹飞行轨迹进行预测;
10.步骤300:生成目标轨迹序列并与公共空域中航空器的目标预测轨迹进行两两比较;
11.步骤400:建立自适应保护区域进行阈值检测,保护区域依据空域和试飞科目进行自适应调整,不同突破保护区域阈值检测标准为航空器根据距离量纲是否违反保护区安全间隔最小要求,若是,则发布冲突预警信息,若不是,则回到步骤100进行下一轮检测。
12.优选地,在步骤200中,所述数据预处理具体包括以下步骤:
13.步骤211:采集试飞机场本场高机动试飞航空器的飞行轨迹数据,通过人工筛选,对于轨迹中的异常点进行删除;
14.步骤212:应用三次样条插值法对于缺失数据进行补齐;
15.步骤213:根据试飞科目不同对飞行轨迹数据进行分类,形成高机动航空器飞行轨迹数据集。
16.优选地,在步骤200中,所述特征选择具体为:
17.选择经度、纬度、高度、速度、航向、试飞科目和航空器类型作为目标轨迹预测模型的输入特征。
18.优选地,所述试飞科目的形式化描述为:
19.sequence_course={dot_course1,dot_course2,dot_course3,...,dot_coursen},其中dot_course={det_lng,det_lat,det_alt,det_spd,det_dir},其中det_lng,det_lat,det_alt,det_spd,det_dir分别表示相邻轨迹点之间的经度差值、纬度差值、高度差值、速度差值和航向差值。
20.优选地,在步骤200中,所述标签标注具体包括以下步骤:
21.步骤221:轨迹形式化描述:
22.表达式为:sequence_dots={dot_1,dot_2,dot_3,dot_4,
…
dot_i},
23.其中dot_i为点迹信息,i为从1开始的自然数,多个轨迹点信息构成的轨迹序列即为轨迹,其中每个轨迹点信息结构为dot={lng,lat,alt,spd,dir,type},其中lng,lat,alt,spd,dir,type分别表示该时刻的经度、纬度、高度、速度、航向和航空器类型;
24.步骤222:形成训练数据集:
25.表达式为:dt_lb=<(sequence_dots,sequence_course)label>,
26.其中dt_lb表示训练数据和标签的关联结构,sequence_dots和sequence_course分别表示需要参与训练的输入航迹序列和试飞科目信息,label表示该训练数据对应的标签;
27.步骤223:轨迹标注:
28.通过滑窗方式对飞行轨迹数据进行标注,在窗口滑动过程中,依次形成标签数组data_label,所述data_label=<dot_n 1,
…
,dot_n m>,表示当起始轨迹点序号为1,窗口长度为n时,标签为第n m个轨迹点信息组成的后续航迹序列;
29.步骤224:试飞科目轨迹划分:
30.根据目标轨迹预测模型输入窗口长度,将试飞科目轨迹进行划分形成试飞科目轨迹子序列。
31.优选地,在步骤2中,所述模型训练具体包括以下步骤:
32.步骤231:确定损失函数:
[0033][0034]
式中,y代表标签信息,为模型预测输出向量;
[0035]
步骤232:对目标轨迹预测模型进行搭建:
[0036]
所述目标轨迹预测模型包括试飞科目注意力模块和gru模块,所述试飞科目注意力模块的注意力机制计算公式为:
[0037][0038]
e
ij
=a(x
i
,d
j
)
[0039][0040]
式中,α
ij
表示参与计算的注意力系数向量,e
ij
表示对于输入参数经计算后的元素级注意力系数,e
ik
为一个e
ij
的实例,x
i
表示每个点迹信息,d
j
表示训练科目序列中的一个成员,c
i
表示在当前输入x
i
信息时,训练科目的重点关注信息即背景信息向量;
[0041]
其中元素级注意力机制计算公式为:
[0042]
a=v
t
tanh(w
id
d
j
w
ix
x
i
)
[0043]
式中,w
id
、w
ix
分别表示训练科目d
j
和输入航点x
i
系数矩阵;
[0044]
所述gru模块的计算公式为:
[0045]
r
t
=σ(w
ir
x
t
w
hr
h
t
‑1)
[0046]
z
t
=σ(w
iz
x
t
w
hz
h
t
‑1)
[0047]
c
t
=tanh(w
in
x
t
r
t
(w
hn
*h
t
‑1))
[0048]
h
t
=z
t
*h
t
‑1 (1
‑
z
t
)*c
t
[0049]
式中,h
t
‑1是t时刻的隐藏状态,x
t
是t时刻的输入,初始时刻的隐藏状态为0,r
t
为重置门,z
t
为更新门,c
t
为计算候选隐藏层,σ表示sigmoid激活函数,tanh表示是一种类似于幅度增大的sigmoid函数,将输入值转换为
‑
1至1之间,w
iz
为更新门的系数矩阵,w
ir
为重置门的系数矩阵,w
hr
为t时刻重置门中h
t
‑1隐状态的系数矩阵,w
hz
为t时刻更新门中h
t
‑1隐状态的系数矩阵,w
in
和w
hn
分别为t时刻中候选隐藏层中x
t
、h
t
‑1的系数矩阵;
[0050]
步骤233:获取注意力系数α
ij
后,通过与所述试飞科目轨迹子序列对应相乘后获得加权试飞科目轨迹子序列矩阵,通过加法操作与原始输入高机动航空器轨迹信息进行融合形成隐藏轨迹序列;
[0051]
步骤234:获取隐藏轨迹序列后,送入所述gru模块进行后续预测运算,获取实时高机动试飞航空器轨迹估算结果;
[0052]
步骤235:重复步骤231至步骤234,经过多步迭代直至完成模型训练。
[0053]
优选地,在步骤400中,所述建立自适应保护区域进行阈值检测,其中自适应保护区域的构建过程包括以下步骤:
[0054]
步骤411:预测轨迹点序列;
[0055]
步骤412:根据轨迹点序列判断轨迹中各个轨迹点所处高度层;
[0056]
步骤413:在不同高度层依据相关管制规范,匹配不同的自适应变化因子,最终实现保护区的自适应调整。
[0057]
优选地,所述自适应保护区域的构建方法依据如下公式进行:
[0058]
(x
‑
x0)2 (y
‑
y0)2≤αr2[0059]
‑
βh≤z
‑
z0≤βh
[0060]
式中,x、y、z分别为航空器经度、纬度和高度坐标在笛卡尔坐标系下的投影信息,x0、y0、z0分别为航空器中心点的经度、纬度和高度,r为水平方向安全间隔,h为垂直方向安全间隔,α,β均为自适应变化因子。
[0061]
优选地,所述步骤100具体为:
[0062]
等待n个雷达扫描周期,提取其历史航迹轨迹,完成高机动试飞航空器的轨迹数据积累,生成初始轨迹序列。
[0063]
本发明的有益效果体现在:
[0064]
1、本发明提出了试飞航空器实时多步轨迹预测模型,改进了现有单步滚动预测飞行目标轨迹方式中容易产生误差累积的缺陷,从而能够有效地提升高机动试飞航空器轨迹估算的准确度,并基于本发明方法,可以更加智能、准确地建立高机动试飞航空器的自适应保护区域,从而有效地提升高机动试飞航空器防碰撞检测精确度,以辅助地面试飞工作人员能够及时进行防相撞调配,保障试飞安全、提高试飞空域的利用率。
[0065]
2、本发明重点提出了基于注意力机制的实时高机动试飞航空器的目标轨迹预测模型,并具体给出了模型的训练过程,通过数据预处理形成高机动航空器飞行轨迹数据集,然后选择合理有效的特征信息来作为高机动试飞航空器实时智能轨迹预测训练模型的输入特征,进行标注标签后,通过试飞科目注意力模块对于试飞科目轨迹信息中的重点信息进行提取,而gru模块具有对时序问题的良好处理能力,在输入gru模块进行计算后即可获取高精度的实时高机动试飞航空器轨迹估算结果。
[0066]
3、由于航空器飞行是一个动态的过程,本发明考虑到计算冲突的模型误差、导航设备的精度限制,因此建立了自适应保护区域,以便于监视并且能够及时做出调整策略,从而保证空域运行的安全。
附图说明
[0067]
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单的介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
[0068]
图1为本发明提供的一种高机动试飞航空器实时智能防相撞检测方法的流程示意图;
[0069]
图2为本发明中目标轨迹预测模型的训练过程的流程示意图;
[0070]
图3为本发明中滑窗式轨迹标注的示意图;
[0071]
图4为本发明中门控网络神经算法的示意图;
[0072]
图5为本发明搭建的目标轨迹预测模型的结构示意图;
[0073]
图6为本发明设定的飞行轨迹示意图;
[0074]
图7为本发明构建的防相撞圆柱形自适应保护区域的示意图;
[0075]
图8为本发明高机动试飞航空器轨迹预测试验在x轴方向的预测误差箱效果图;
[0076]
图9为本发明高机动试飞航空器轨迹预测试验在y轴方向的预测误差箱效果图;
[0077]
图10为本发明高机动试飞航空器轨迹预测试验在z轴方向的预测误差箱效果图;
[0078]
图11为本发明多模型轨迹预测对比效果图;
[0079]
图12为针对机场高机动航空器起飞虚警问题的防相撞检测示意图。
具体实施方式
[0080]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
[0081]
因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0082]
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
[0083]
实施例1
[0084]
如图1
‑
11所示,本实施例提供一种高机动试飞航空器实时智能防相撞检测方法,包括以下步骤:
[0085]
步骤100:生成航空器实际起飞经过n个雷达周期积累产生的初始轨迹序列;
[0086]
步骤200:经过实时高机动航空器轨迹预测后形成目标轨迹预测模型,目标轨迹预测模型的训练过程依次为数据预处理、特征选择、标签标注和模型训练,通过目标轨迹预测模型对高机动航迹飞行轨迹进行预测;
[0087]
步骤300:生成目标轨迹序列并与公共空域中航空器的目标预测轨迹进行两两比较;
[0088]
步骤400:建立自适应保护区域进行阈值检测,保护区域依据空域和试飞科目进行自适应调整,不同突破保护区域阈值检测标准为航空器根据距离量纲是否违反保护区安全间隔最小要求,若是,则发布冲突预警信息,若不是,则回到步骤100进行下一轮检测。
[0089]
本发明基于目标轨迹预测模型,目标轨迹预测模型是基于注意力机制的实时高机动试飞航空器轨迹预测模型,可一次给出多步轨迹预测结果,改进了现有单步滚动预测飞行目标轨迹方式中容易产生误差累积的缺陷,从而能够有效地提升高机动试飞航空器轨迹估算的准确度,且可以更加智能、准确地建立高机动试飞航空器的自适应保护区域,从而有效地提升高机动试飞航空器防碰撞检测精确度,以辅助地面试飞工作人员能够及时进行防相撞调配,保障试飞安全、提高试飞空域的利用率。
[0090]
具体地,在步骤200中,所述数据预处理具体包括以下步骤:
[0091]
步骤211:采集试飞机场本场高机动试飞航空器的飞行轨迹数据,通过人工筛选,对于轨迹中的异常点进行删除;
[0092]
步骤212:应用三次样条插值法对于缺失数据进行补齐;
[0093]
步骤213:根据试飞科目不同对飞行轨迹数据进行分类,形成高机动航空器飞行轨迹数据集。
[0094]
需要说明的是,在步骤212中,三次样条插值法是通过一系列形值点的一条光滑曲线,数学上通过求解三弯矩方程组得出曲线函数组的过程。实际计算时还需要引入边界条件才能完成计算,一般的计算方法书上都没有说明非扭结边界的定义,但数值计算软件如matlab都把非扭结边界条件作为默认的边界条件。其涉及到的相关函数和数学表达式均为现有技术,这里不再赘述。
[0095]
飞行轨迹数据一般包括时间、批号、经度、纬度、高度、速度、航向等信息,由于试飞科目和航空器类型对于试飞航空器轨迹预测影响较大,因此,具体地,在步骤200中,所述特征选择具体为:选择经度、纬度、高度、速度、航向、试飞科目和航空器类型作为目标轨迹预测模型的输入特征。
[0096]
其中试飞科目为高机动航空器需要完成的试飞动作,每个试飞科目由于划设试飞的空域不同,实际飞行的轨迹地理位置会发生较大变化,因此,本发明中对于试飞科目使用预计飞行动作轨迹点的相对位置进行表示,因此,具体地,所述试飞科目的形式化描述为:
[0097]
sequence_course={dot_course1,dot_course2,dot_course3,...,dot_coursen},其中dot_course={det_lng,det_lat,det_alt,det_spd,det_dir},其中det_lng,det_lat,det_alt,det_spd,det_dir分别表示相邻轨迹点之间的经度差值、纬度差值、高度差值、速度差值和航向差值。
[0098]
具体地,如图3所示,在步骤200中,所述标签标注具体包括以下步骤:
[0099]
步骤221:轨迹形式化描述:
[0100]
表达式为:sequence_dots={dot_1,dot_2,dot_3,dot_4,
…
dot_i},
[0101]
其中dot_i为点迹信息,i为从1开始的自然数,多个轨迹点信息构成的轨迹序列即为轨迹,其中每个轨迹点信息结构为dot={lng,lat,alt,spd,dir,type},其中lng,lat,alt,spd,dir,type分别表示该时刻的经度、纬度、高度、速度、航向和航空器类型;
[0102]
步骤222:形成训练数据集:
[0103]
表达式为:dt_lb=<(sequence_dots,sequence_course)label>,
[0104]
其中dt_lb表示训练数据和标签的关联结构,sequence_dots和sequence_course分别表示需要参与训练的输入航迹序列和试飞科目信息,label表示该训练数据对应的标签;
[0105]
步骤223:轨迹标注:
[0106]
通过滑窗方式对飞行轨迹数据进行标注,在窗口滑动过程中,依次形成标签数组data_label,所述data_label=<dot_n 1,
…
,dot_n m>,表示当起始轨迹点序号为1,窗口长度为n时,标签为第n m个轨迹点信息组成的后续航迹序列;
[0107]
步骤224:试飞科目轨迹划分:
[0108]
根据目标轨迹预测模型输入窗口长度,将试飞科目轨迹进行划分形成试飞科目轨
迹子序列。
[0109]
需要说明的是,在步骤223中,为了方便计算,可将飞行轨迹数据及地理信息投影到笛卡尔坐标系。
[0110]
具体地,在步骤2中,所述模型训练具体包括以下步骤:
[0111]
步骤231:确定损失函数:
[0112][0113]
式中,y代表标签信息,为模型预测输出向量;
[0114]
这里损失函数作为预测精度判据,最优预测结果应该使损失函数值最小;
[0115]
步骤232:对目标轨迹预测模型进行搭建:
[0116]
本发明针对高机动试飞航空器需要完成试飞科目规定动作的特点,在本发明中应用注意力机制对于试飞科目轨迹信息中的重点信息进行提取,并结合gru门控神经网络对时序问题的良好处理能力,提出了基于注意力机制的目标轨迹预测模型,通过展开采用门控循环神经网络为多步轨迹预测组件,其核心算法如图4所示,目标轨迹预测模型结构如图5所示;
[0117]
试飞科目基本要求如下表所示:
[0118]
表1试飞科目基本要求表
[0119]
属性值进入高度5000速度700俯冲角10拉起点场高2000退出高度4500进入航向50
[0120]
为了提高试飞效率,同时保障试飞安全,在开飞前会根据分型卡片设定飞行轨迹,示意图如图6所示;
[0121]
目标轨迹预测模型包括试飞科目注意力模块和gru模块;
[0122]
其中试飞科目注意力模块的注意力机制计算公式为:
[0123][0124]
e
ij
=a(x
i
,d
j
)
[0125][0126]
式中,α
ij
表示参与计算的注意力系数向量,e
ij
表示对于输入参数经计算后的元素级注意力系数,e
ik
为一个e
ij
的实例,x
i
表示每个点迹信息,d
j
表示训练科目序列中的一个成员,c
i
表示在当前输入x
i
信息时,训练科目的重点关注信息即背景信息向量;
[0127]
其中元素级注意力机制计算公式为:
[0128]
a=v
t
tanh(w
id
d
j
w
ix
x
i
)
[0129]
式中,w
id
、w
ix
分别表示训练科目d
j
和输入航点x
i
系数矩阵;
[0130]
所述gru模块的计算公式为:
[0131]
r
t
=σ(w
ir
x
t
w
hr
h
t
‑1)
[0132]
z
t
=σ(w
iz
x
t
w
hz
h
t
‑1)
[0133]
c
t
=tanh(w
in
x
t
r
t
(w
hn
*h
t
‑1))
[0134]
h
t
=z
t
*h
t
‑1 (1
‑
z
t
)*c
t
[0135]
式中,h
t
‑1是t时刻的隐藏状态,x
t
是t时刻的输入,初始时刻的隐藏状态为0,r
t
为重置门,z
t
为更新门,c
t
为计算候选隐藏层,σ表示sigmoid激活函数,tanh表示是一种类似于幅度增大的sigmoid函数,将输入值转换为
‑
1至1之间,w
iz
为更新门的系数矩阵,w
ir
为重置门的系数矩阵,w
hr
为t时刻重置门中h
t
‑1隐状态的系数矩阵,w
hz
为t时刻更新门中h
t
‑1隐状态的系数矩阵,w
in
和w
hn
分别为t时刻中候选隐藏层中x
t
、h
t
‑1的系数矩阵;
[0136]
步骤233:获取注意力系数α
ij
后,通过与所述试飞科目轨迹子序列对应相乘后获得加权试飞科目轨迹子序列矩阵,通过加法操作与原始输入高机动航空器轨迹信息进行融合形成隐藏轨迹序列;
[0137]
步骤234:获取隐藏轨迹序列后,送入所述gru模块进行后续预测运算,获取实时高机动试飞航空器轨迹估算结果;
[0138]
步骤235:重复步骤231至步骤234,经过多步迭代直至完成模型训练。
[0139]
这里重点提出了基于注意力机制的实时高机动试飞航空器的目标轨迹预测模型,并具体给出了模型的训练过程,通过数据预处理形成高机动航空器飞行轨迹数据集,然后选择合理有效的特征信息来作为高机动试飞航空器实时智能轨迹预测训练模型的输入特征,进行标注标签后,通过试飞科目注意力模块对于试飞科目轨迹信息中的重点信息进行提取,而gru模块具有对时序问题的良好处理能力,在输入gru模块进行计算后即可获取高精度的实时高机动试飞航空器轨迹估算结果。本发明基于高机动试飞航空器轨迹预测试验效果如图8
‑
10所示。
[0140]
航空器飞行是一个动态的过程,考虑到计算冲突的模型误差、导航设备的精度限制,为了保证空域运行的安全,因此需要在航空器之间建立一个便于监视并且能够及时做出调整策略的保证安全的航空器飞行保护区,本发明可采用圆柱形保护区作为高机动航空器防相撞检测依据,如图7所示。
[0141]
圆柱体飞行保护区以航空器所在重心位置标定为保护区的中心,垂直方向的保护高度为保护半径的2倍,半径为水平安全间隔,一旦有其他航空器的保护区进入此空间的区域,则代表有其他航空器入侵,可能发生飞行碰撞。由于参加试飞的高机动航空器在完成试飞科目时通常需要进行极限飞行,因此在进行防相撞检测时,需要根据预测轨迹所在高度层建立自适应的飞行保护区。
[0142]
因此,具体地,在步骤400中,所述建立自适应保护区域进行阈值检测,其中自适应保护区域的构建过程包括以下步骤:
[0143]
步骤411:预测轨迹点序列;
[0144]
步骤412:根据轨迹点序列判断轨迹中各个轨迹点所处高度层;
[0145]
步骤413:在不同高度层依据相关管制规范,匹配不同的自适应变化因子,最终实
现保护区的自适应调整。
[0146]
具体地,自适应保护区域的构建方法依据如下公式进行:
[0147]
(x
‑
x0)2 (y
‑
y0)2≤αr2[0148]
‑
βh≤z
‑
z0≤βh
[0149]
式中,x、y、z分别为航空器经度、纬度和高度坐标在笛卡尔坐标系下的投影信息,x0、y0、z0分别为航空器中心点的经度、纬度和高度,r为水平方向安全间隔,h为垂直方向安全间隔,α,β均为自适应变化因子。
[0150]
具体地,所述步骤100具体为:
[0151]
等待n个雷达扫描周期,提取其历史航迹轨迹,完成高机动试飞航空器的轨迹数据积累,生成初始轨迹序列。
[0152]
实施例2
[0153]
如图12所示,本实施例为基于实施例1针对时隙间隔调配解决因与民航机场起飞航线距离近而造成的某机场高机动航空器起飞虚警问题的实例,提供一种高机动试飞航空器实时智能防相撞检测方法,包括以下步骤:
[0154]
步骤一:初始轨迹序列生成:
[0155]
需要等待n个雷达扫描周期,提取其历史航迹轨迹,完成高机动航空器轨迹数据积累,应用注意机制对试飞科目信息进行估算,与轨迹信息进行整合,形成高机动航空器目标轨迹预测模型输入数据;
[0156]
步骤二:实时高机动航空器轨迹点预测:
[0157]
将这组高机动航空器轨迹序列(sequence_dots)输入到目标轨迹预测模型中,该模型在实现上使用函数trajectory_predict作为轨迹预测模型接口,trajectory_predict函数会返回该高机动航空器预测点迹队列(predicted_dots);
[0158]
步骤三:将预测结果(predicted_dots)与民航目标航空器预测位置信息进行滑窗比较,选择欧式距离作为阈值匹配的量纲,如果在相同时间窗口内,保护区内有民航航空器进入,则生成航空器预计发生碰撞时间并发布禁止放飞警告信息提示,显示禁止起飞时间段,完成高机动航空器实时智能防相撞检测;
[0159]
步骤四:如果不存在冲突,则等待下一时刻雷达扫描周期到来,更新输入轨迹队列,重新进行防相撞检测。
[0160]
防相撞检测示意如图12所示,高机动目标经过五步预测后根据保护区域划定了虚线位置所拟定的与民航目标的最小时间窗口,塔台根据此时间窗口进行起飞间隔调配。
[0161]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

