1.本实用新型属于无人机定位技术领域,尤其涉及一种基于组网式的无人机侦测定位系统。
背景技术:
2.现有无人机的定位系统具有以下不足:
3.一、功能单一,定位后只能对无人机进行定位跟踪,无法进行其他操作;
4.二、不具备无人机的导航诱骗功能,也就无法对雷达发现的无人机进行接管与控制,以及无法对无人机进行准确停机降落。
技术实现要素:
5.发明目的:为了克服现有技术中存在的不足,本实用新型提供一种基于组网式的无人机侦测定位系统,既能对无人机进行定位,又能对无人机进行引导降落,结构简单,使用方便。
6.技术方案:为实现上述目的,本实用新型的一种基于组网式的无人机侦测定位系统,包括雷达站和地面总控制站,所述雷达站为多个,多个所述雷达站分别与地面总控制站通讯连接,各所述雷达站相互组网并对组网限定空域进行无人机的实时侦测;
7.还包括无人机定位停机平台;所述地面总控制站具有牵引式导航欺骗信号生成系统、无人机飞行方向诱骗遥控系统和天线阵列,所述无人机飞行方向诱骗遥控系统以及天线阵列分别与牵引式导航欺骗信号生成系统通信连接,所述无人机定位停机平台具有 gps定位模块,所述gps定位模块与牵引式导航欺骗信号生成系统通信连接。
8.进一步地,所述无人机定位停机平台包括钢板停机圆台和若干有色光线发射器,若干有色光线发射器呈圆周阵列布置于无人机定位停机平台的上表面边缘,且有色光线发射器竖直朝上设置,使得从所有有色光线发射器发射出的有色光线构成环形有色光线柱。
9.进一步地,所述无人机定位停机平台还包括若干指示灯,若干指示灯呈圆周阵列布置于钢板停机圆台的外周侧。
10.进一步地,所述无人机定位停机平台还包括水泥混凝土基座和升降设备,所述钢板停机圆台通过升降设备支撑设置于水泥混凝土基座上。
11.进一步地,所述无人机定位停机平台还包括设置于水泥混凝土基座上的控制箱,所述gps定位模块集成于控制箱内,且控制箱内还设置有电源、控制器和电磁继电器;所述电源给gps定位模块、控制器、电磁继电器以及升降设备供电,所述控制器与地面总控制站信号传输连接,所述电磁继电器通过所述控制器控制;
12.所述电源还给有色光线发射器及指示灯供电,且在供电电路中,有色光线发射器与指示灯并联。
13.进一步地,所述水泥混凝土基座具有梯子。
14.有益效果:本实用新型的一种基于组网式的无人机侦测定位系统,有益效果如下:
15.1)在发现无人机并定位后,能够通过发送诱骗定位信息对无人机进行接管与控制,从而使其降落至指定位置的无人机定位停机平台,集无人机定位与接收为一体;
16.2)本实用新型结构简单,使用方便,适于广阔空域的无人机实时侦测管控。
附图说明
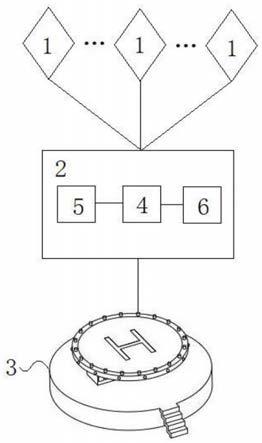
17.附图1为本实用新型的整体结构示意图;
18.附图2为无人机定位停机平台的整体结构示意图;
19.附图3为无人机定位停机平台的主视结构示意图;
20.附图4为有色光线发射器发射有色光线构成环形有色光线柱的结构示意图;
21.附图5为无人机定位停机平台的部分设备的供电示意图。
具体实施方式
22.下面结合附图对本实用新型作更进一步的说明。
23.如附图1所示,一种基于组网式的无人机侦测定位系统,包括雷达站1和地面总控制站2,所述雷达站1为多个,多个所述雷达站1分别与地面总控制站2通讯连接,各所述雷达站1相互组网并对组网限定空域进行无人机的实时侦测;通过雷达站1能够侦测到无人机,并对其进行定位。
24.本实用新型还包括无人机定位停机平台3;所述地面总控制站2具有牵引式导航欺骗信号生成系统4、无人机飞行方向诱骗遥控系统5和天线阵列6,所述无人机飞行方向诱骗遥控系统5以及天线阵列6分别与牵引式导航欺骗信号生成系统4通信连接,所述无人机定位停机平台3具有gps定位模块3.1,所述gps定位模块3.1与牵引式导航欺骗信号生成系统4通信连接。在发现无人机并定位后,gps定位模块3.1的定位信息传输至牵引式导航欺骗信号生成系统4,无人机飞行方向诱骗遥控系统5启动牵引式导航欺骗信号生成系统4,同时控制配套的显示屏幕显示出相应的指示信息,牵引式导航欺骗信号生成系统4启动后,使用在dsp上的导航欺骗算法,形成与gps定位模块3.1 对应的信号对无人机进行牵引式引导,从而实现对无人机的接管与控制,使其降落在无人机定位停机平台3上。
25.如附图2和附图4所示,所述无人机定位停机平台3包括钢板停机圆台31和若干有色光线发射器32,若干有色光线发射器32呈圆周阵列布置于无人机定位停机平台3 的上表面边缘,且有色光线发射器32竖直朝上设置,使得从所有有色光线发射器32发射出的有色光线构成环形有色光线柱320。通过构成环形有色光线柱320,无人机飞行到环形有色光线柱320内即可降落,降落地点准确、可靠。
26.更为具体的,所述无人机定位停机平台3还包括若干指示灯33,若干指示灯33呈圆周阵列布置于钢板停机圆台31的外周侧,为无人机指明降落地点。
27.本实用新型的所述无人机定位停机平台3还包括水泥混凝土基座35和升降设备34,所述钢板停机圆台31通过升降设备34支撑设置于水泥混凝土基座35上,通过升降设备34能够便于调节无人机定位停机平台3的高度。
28.如附图3和附图5所示,所述无人机定位停机平台3还包括设置于水泥混凝土基座 35上的控制箱36,所述gps定位模块3.1集成于控制箱36内,且控制箱36内还设置有电源3.2、控制器3.3和电磁继电器3.5;所述电源3.2给gps定位模块3.1、控制器 3.3、电磁继电
器3.5以及升降设备34供电,所述控制器3.3与地面总控制站2信号传输连接,所述电磁继电器3.5通过所述控制器3.3控制。
29.值得注意的是,所述电源3.2还给有色光线发射器32及指示灯33供电,且在供电电路中,有色光线发射器32与指示灯33并联,在有色光线发射器32所在线路或指示灯33所在线路的某一线路出现故障时,还能够保证能够为无人机提供指示光源。
30.更为具体的,所述水泥混凝土基座35具有梯子38,便于工作人员上去。
31.以上所述仅是本实用新型的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
技术特征:
1.一种基于组网式的无人机侦测定位系统,其特征在于:包括雷达站(1)和地面总控制站(2),所述雷达站(1)为多个,多个所述雷达站(1)分别与地面总控制站(2)通讯连接,各所述雷达站(1)相互组网并对组网限定空域进行无人机的实时侦测;还包括无人机定位停机平台(3);所述地面总控制站(2)具有牵引式导航欺骗信号生成系统(4)、无人机飞行方向诱骗遥控系统(5)和天线阵列(6),所述无人机飞行方向诱骗遥控系统(5)以及天线阵列(6)分别与牵引式导航欺骗信号生成系统(4)通信连接,所述无人机定位停机平台(3)具有gps定位模块(3.1),所述gps定位模块(3.1)与牵引式导航欺骗信号生成系统(4)通信连接。2.根据权利要求1所述的一种基于组网式的无人机侦测定位系统,其特征在于:所述无人机定位停机平台(3)包括钢板停机圆台(31)和若干有色光线发射器(32),若干有色光线发射器(32)呈圆周阵列布置于无人机定位停机平台(3)的上表面边缘,且有色光线发射器(32)竖直朝上设置,使得从所有有色光线发射器(32)发射出的有色光线构成环形有色光线柱(320)。3.根据权利要求2所述的一种基于组网式的无人机侦测定位系统,其特征在于:所述无人机定位停机平台(3)还包括若干指示灯(33),若干指示灯(33)呈圆周阵列布置于钢板停机圆台(31)的外周侧。4.根据权利要求3所述的一种基于组网式的无人机侦测定位系统,其特征在于:所述无人机定位停机平台(3)还包括水泥混凝土基座(35)和升降设备(34),所述钢板停机圆台(31)通过升降设备(34)支撑设置于水泥混凝土基座(35)上。5.根据权利要求4所述的一种基于组网式的无人机侦测定位系统,其特征在于:所述无人机定位停机平台(3)还包括设置于水泥混凝土基座(35)上的控制箱(36),所述gps定位模块(3.1)集成于控制箱(36)内,且控制箱(36)内还设置有电源(3.2)、控制器(3.3)和电磁继电器(3.5);所述电源(3.2)给gps定位模块(3.1)、控制器(3.3)、电磁继电器(3.5)以及升降设备(34)供电,所述控制器(3.3)与地面总控制站(2)信号传输连接,所述电磁继电器(3.5)通过所述控制器(3.3)控制;所述电源(3.2)还给有色光线发射器(32)及指示灯(33)供电,且在供电电路中,有色光线发射器(32)与指示灯(33)并联。6.根据权利要求4或5所述的一种基于组网式的无人机侦测定位系统,其特征在于:所述水泥混凝土基座(35)具有梯子(38)。
技术总结
本实用新型公开了一种基于组网式的无人机侦测定位系统,包括雷达站和地面总控制站,雷达站为多个,多个所述雷达站分别与地面总控制站通讯连接,各雷达站相互组网并对组网限定空域进行无人机的实时侦测;还包括无人机定位停机平台;地面总控制站具有牵引式导航欺骗信号生成系统、无人机飞行方向诱骗遥控系统和天线阵列,无人机飞行方向诱骗遥控系统以及天线阵列分别与牵引式导航欺骗信号生成系统通信连接,无人机定位停机平台具有GPS定位模块,GPS定位模块与牵引式导航欺骗信号生成系统通信连接。本实用新型提供的一种基于组网式的无人机侦测定位系统,既能对无人机进行定位,又能对无人机进行引导降落,结构简单,使用方便。使用方便。使用方便。
技术研发人员:苏颖 闫廷廷 嵇强 翟智云
受保护的技术使用者:中交遥感天域科技江苏有限公司
技术研发日:2020.12.23
技术公布日:2021/10/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

