1.本发明涉及姿态纠正技术领域,具体涉及一种人工智能学习系统及姿势纠正方法。
背景技术:
2.青少年学生每天需要花费大量的时间在学习中,保持一个良好的学习姿势可以有效的保护青少年的视力和体型发育,否则处在发育阶段的青少年,长期不良的学习姿势,眼睛距离书本过近,身体伏在桌子上和坐不直,容易造成近视眼、驼背,损伤脊柱和腰椎;双脚离地,不易写好字;降低学习效率,严重危害身体健康。
3.现有技术cn201510362497.6公开了保持正确姿势学习桌及使用方法,其组成包括:桌面,所述的桌面的左、前、右面安装有挡板,所述的前挡板上面安装有两个红外感应器,所述的桌面上部左边具有照明灯,所述的照明灯的底座上具有电子表,所述的桌面右边上部具有放置笔用凹槽,所述的桌面的下部具有桌斗,所述的桌面下部还具有桌腿,可以纠正不良的姿势,避免造成近视眼、驼背,保护脊柱和腰椎。
4.虽然上述现有技术可以一定程度的纠正不良姿势,但仍然存在缺陷,比如:仅单一准则判断使用对象的姿势是否恰当,容易造成误判,判别精度低,同时未设置预警装置,难以提醒使用对象及时意识到姿势不恰当且进行纠正,纠正效果差。
技术实现要素:
5.本发明的目的在于提供一种人工智能学习系统及姿势纠正方法,以解决现有技术中仅单一准则判断使用对象的姿势是否恰当,容易造成误判,判别精度低,同时未设置预警装置,难以提醒使用对象及时意识到姿势不恰当且进行纠正,纠正效果差的技术问题。
6.为解决上述技术问题,本发明具体提供下述技术方案:
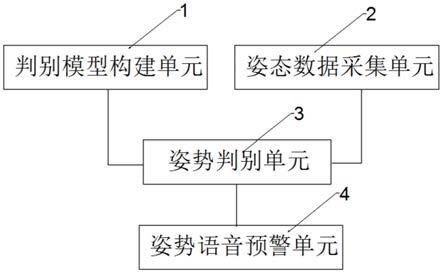
7.一种人工智能学习系统,包括判别模型构建单元,姿态数据采集单元,姿势判别单元,姿势语音预警单元;
8.所述判别模型构建单元,用于基于人工神经网络构建姿势判别模型,并将所述姿势判别模型反馈至姿势判别单元;
9.所述姿态数据采集单元,用于实时采集目标对象的姿势数据,并将姿势数据同步反馈至姿势判别单元;
10.所述姿势判别单元,与所述判别模型构建单元、姿态数据采集单元通讯连接,所述姿势判别单元利用所述姿势判别模型基于所述姿势数据对所述目标对象进行姿势状态的判别;
11.所述姿势语音预警单元,与所述姿势判别单元通讯连接,所述姿势语音预警单元用于根据所述姿势状态的判别结果对所述目标对象进行语音预警。
12.作为本发明的一种优选方案,还包括环形壳体,所述环形壳体分别包括与目标对象的用笔本体外周部匹配嵌套的第一环形壳体,以及与目标对象的用笔手腕外周部匹配嵌
套的第二环形壳体,所述判别模型构建单元,姿态数据采集单元,姿势判别单元分别集成于所述第一环形壳体内,所述姿势语音预警单元集成于所述第二环形壳体内。
13.作为本发明的一种优选方案,所述通讯连接采用双模通信模块实现,所述双模通信模块包括hplc载波通信单元和无线通信单元。
14.作为本发明的一种优选方案,所述第一环形壳体和第二环形壳体内部均设置有储能电源,位于第一环形壳体内的所述储能电源与所述判别模型构建单元,姿态数据采集单元,姿势判别单元构成的集成组件电性连接为所述判别模型构建单元,姿态数据采集单元,姿势判别单元提供工作电压和电流,位于第二环形壳体内的所述储能电源与所述姿势语音预警单元构成的集成组件电性连接为所述姿势语音预警单元提供工作电压和电流。
15.作为本发明的一种优选方案,本发明提供了一种根据所述的人工智能学习系统的姿势纠正方法,包括以下步骤:
16.步骤s1、所述判别模型构建单元基于人工神经网络构建姿势判别模型,并将所述姿势判别模型反馈至姿势判别单元;
17.步骤s2、所述姿态数据采集单元实时采集目标对象的姿势数据,并将姿势数据同步反馈至姿势判别单元;
18.步骤s3、所述姿势判别单元利用所述姿势判别模型基于所述姿势数据对所述目标对象进行姿势状态的判别,并将所述姿势状态的判别结果反馈至姿势语音预警单元;
19.步骤s4、所述姿势语音预警单元根据所述姿势状态的判别结果对所述目标对象进行语音预警。
20.作为本发明的一种优选方案,所述步骤s1中,基于人工神经网络构建姿势判别模型的具体方法包括:
21.步骤s101、量化目标对象的姿势日志获得姿势判别特征样本集,并对姿势判别特征样本集进行特征寻优获得判别关键特征样本集;
22.步骤s102、基于判别关键特征样本集建立姿势判别模型,并利用模型评估指标对姿势判别模型进行评估优化。
23.作为本发明的一种优选方案,所述步骤s101中,量化姿势日志获得姿势判别特征样本集的具体方法包括:
24.在姿势日志中随机抽取相同数量的恰当姿势数据作为正样本以及非恰当姿势数据作为负样本混合构成姿势样本集;
25.对姿势样本集进行特征提取获得第一连续性特征和第二离散型特征,并将所述第一连续性特征进行等频分桶转化为第一离散型特征,同时第一离散特征和第二离散特征进行频度降维获得判别特征集合,所述降维公式为:
[0026][0027]
其中,y(i)为判别特征集合的特征值,i为第一离散型特征和第二离散型特征构成的集合,x(i)为第一离散型特征和第二离散型特征的特征值,p(i)为第一离散型特征和第二离散型特征的特征频率,α为第一离散型特征和第二离散型特征的特征频率阈值,m为常数;
[0028]
基于姿势样本集获取所述判别特征集合中所有判别特征的特征值,并与判别特征
集合建立新映射获得姿势判别特征样本集。
[0029]
作为本发明的一种优选方案,所述步骤s101中,利用多目标搜索策略筛选姿势判别特征样本集获得关键特征量的具体方式为:
[0030]
利用姿势判别特征样本集中各个正样本间的欧式距离获得正样本内度,所述正样本内度的计算公式为:
[0031][0032]
利用姿势判别特征样本集中各个正样本间与各个负样本的欧氏距离获得正样本外度,所述正样本外度的计算公式:
[0033][0034]
将正样本内度q1进行最小化修正获得q3,利用免疫算法将q2和q2联合作为目标函数在姿势判别特征样本集中对关键特征量的多目标搜索,所述目标函数为:
[0035][0036]
其中,y
k
、y
j
分别为第k,j个正样本,y
s
为第s个负样本,m为正样本总数或负样本总数,t为转置运算符。
[0037]
作为本发明的一种优选方案,所述步骤s102中,基于评估关键特征样本集建立状态评估模型的具体方法包括:
[0038]
基于姿势判别特征样本集获取关键特征量的特征值,并与关键特征量建立新映射获得判别关键特征样本集;
[0039]
在所述判别关键特征样本集中依次随机抽取50%、30%和20%的数据汇总作为训练集、测试集和验证集;
[0040]
将训练集、测试集和验证集运用在多种人工神经网络上建模获得多组姿势判别模型,并比较多组姿势判别模型的模型评价指标选择出最优姿势判别模型;
[0041]
其中,模型评价指标为roc曲线的auc值。
[0042]
作为本发明的一种优选方案,所述判别结果包括恰当和非恰当,所述步骤s4中,对所述目标对象进行语音预警的具体方法包括:
[0043]
若判别结果为恰当,则姿势语音预警单元不作语音提示操作;
[0044]
若判别结果为非恰当,则姿势语音预警单元同步进行语音提示操作。
[0045]
本发明与现有技术相比较具有如下有益效果:
[0046]
本发明基于人工神经网络构建姿势判别模型用于作为评判目标对象的姿势状态的恰当与否,同时对判别样本集进行特征寻优,获得快速精准判别目标对象姿势状态的关键特征,从而提高判别姿势状态的综合准则,最终提高判别准确度,而且设置有姿势语音预警单元实现对目标对象的实时语音提醒,使得使用对象意识到不良姿势并加以纠正,循环往复养成良好的坐姿习惯。
附图说明
[0047]
为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方
式或现有技术描述中所需要使用附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
[0048]
图1为本发明实施例提供的人工智能学习系统结构示意图;
[0049]
图2为本发明实施例提供的第一环形壳体结构示意图;
[0050]
图3为本发明实施例提供的第二环形壳体结构示意图;
[0051]
图4为本发明实施例提供的姿势纠正方法流程图。
[0052]
图中的标号分别表示如下:
[0053]1‑
判别模型构建单元;2
‑
姿态数据采集单元;3
‑
姿势判别单元;4
‑
姿势语音预警单元;5
‑
第一环形壳体;6
‑
第二环形壳体。
具体实施方式
[0054]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0055]
如图1
‑
4所示,本发明提供了一种人工智能学习系统,包括判别模型构建单元,姿态数据采集单元,姿势判别单元,姿势语音预警单元;
[0056]
所述判别模型构建单元,用于基于人工神经网络构建姿势判别模型,并将所述姿势判别模型反馈至姿势判别单元;
[0057]
所述姿态数据采集单元,用于实时采集目标对象的姿势数据,并将姿势数据同步反馈至姿势判别单元;
[0058]
所述姿势判别单元,与所述判别模型构建单元、姿态数据采集单元通讯连接,所述姿势判别单元利用所述姿势判别模型基于所述姿势数据对所述目标对象进行姿势状态的判别;
[0059]
所述姿势语音预警单元,与所述姿势判别单元通讯连接,所述姿势语音预警单元用于根据所述姿势状态的判别结果对所述目标对象进行语音预警。
[0060]
如图2和3所示,还包括环形壳体,所述环形壳体分别包括与目标对象的用笔本体外周部匹配嵌套的第一环形壳体,以及与目标对象的用笔手腕外周部匹配嵌套的第二环形壳体,所述判别模型构建单元,姿态数据采集单元,姿势判别单元分别集成于所述第一环形壳体内,所述姿势语音预警单元集成于所述第二环形壳体内。
[0061]
实际使用时,将第一环形壳体嵌套在用笔本体上进行套接固定,并将第二环形壳体嵌套在用笔手腕处进行套接穿戴,在姿势判别单元利用姿势判别模型判定握笔姿势不恰当时,可及时的发出语音提醒,而且人工学习系统采用与常用笔本体套接固定,能够随意的拆卸,语音播报提醒目标对象注意拿笔的姿势和角度,使用便捷。
[0062]
所述通讯连接采用双模通信模块实现,所述双模通信模块包括hplc载波通信单元和无线通信单元。
[0063]
所述第一环形壳体和第二环形壳体内部均设置有储能电源,位于第一环形壳体内的所述储能电源与所述判别模型构建单元,姿态数据采集单元,姿势判别单元构成的集成
组件电性连接为所述判别模型构建单元,姿态数据采集单元,姿势判别单元提供工作电压和电流,位于第二环形壳体内的所述储能电源与所述姿势语音预警单元构成的集成组件电性连接为所述姿势语音预警单元提供工作电压和电流。
[0064]
如图4所示,基于上述人工智能学习系统的结构,本发明提供了一种姿势纠正方法,包括以下步骤:
[0065]
步骤s1、所述判别模型构建单元基于人工神经网络构建姿势判别模型,并将所述姿势判别模型反馈至姿势判别单元;
[0066]
所述步骤s1中,基于人工神经网络构建姿势判别模型的具体方法包括:
[0067]
步骤s101、量化目标对象的姿势日志获得姿势判别特征样本集,并对姿势判别特征样本集进行特征寻优获得判别关键特征样本集;
[0068]
所述步骤s101中,量化姿势日志获得姿势判别特征样本集的具体方法包括:
[0069]
在姿势日志中随机抽取相同数量的恰当姿势数据作为正样本以及非恰当姿势数据作为负样本混合构成姿势样本集;
[0070]
具体的,姿势判别特征样本集中包括50%恰当姿势数据和50%非恰当姿势数据以保证样本的均衡性,在实际使用中也可根据实际进行调整。
[0071]
对姿势样本集进行特征提取获得第一连续性特征和第二离散型特征,并将所述第一连续性特征进行等频分桶转化为第一离散型特征,同时第一离散特征和第二离散特征进行频度降维获得判别特征集合,所述降维公式为:
[0072][0073]
其中,y(i)为判别特征集合的特征值,i为第一离散型特征和第二离散型特征构成的集合,x(i)为第一离散型特征和第二离散型特征的特征值,p(i)为第一离散型特征和第二离散型特征的特征频率,α为第一离散型特征和第二离散型特征的特征频率阈值,m为常数;
[0074]
具体可实现将低于离散型特征的特征频率阈值的所有离散型特征均取同一常数,从而可将多个低频的离散型特征变为一个高频的离散型特征,进而降低离散型特征的维度,且保留高频的离散型特征可保留建立模型的重要特征。
[0075]
基于姿势样本集获取所述判别特征集合中所有判别特征的特征值,并与判别特征集合建立新映射获得姿势判别特征样本集。
[0076]
所述步骤s101中,利用多目标搜索策略筛选姿势判别特征样本集获得关键特征量的具体方式为:
[0077]
利用姿势判别特征样本集中各个正样本间的欧式距离获得正样本内度,所述正样本内度的计算公式为:
[0078][0079]
利用姿势判别特征样本集中各个正样本间与各个负样本的欧氏距离获得正样本外度,所述正样本外度的计算公式:
[0080][0081]
将正样本内度q1进行最小化修正获得q3,利用免疫算法将q2和q2联合作为目标函
数在姿势判别特征样本集中对关键特征量的多目标搜索,所述目标函数为:
[0082][0083]
其中,y
k
、y
j
分别为第k,j个正样本,y
s
为第s个负样本,m为正样本总数或负样本总数,t为转置运算符。
[0084]
q1越大,正样本内度越大,即正样本间连接关系越为密切,利用姿势判别特征进行预测待判别的姿势状态与正样本的相似度越高,但正样本规模普遍较小;q2越小,正样本外度越小,即正样本和负样本连接关系越为稀疏,利用姿势判别特征进行预测待判别的姿势状态与正样本的相似度越低,但正样本规模普遍较大。q1和q2相互冲突互补,这两个冲突互补的项体现了姿势判别相似度划分的两个方面,需要在二者之间权衡,取一个折衷点。
[0085]
因此可将q1和q2是递增函数,换言之,σ为一常数,q3和q2是两个互相冲突的目标函数,同时最小化q3和q2可以保证正样本内连接紧密而正样本间连接稀疏,因此利用q3和q2作为多目标搜索策略的目标函数可获得区分正、负样本的关键特征量,即为建立姿势判别模型获得最佳状态属性区分的关键特征量。
[0086]
步骤s102、基于判别关键特征样本集建立姿势判别模型,并利用模型评估指标对姿势判别模型进行评估优化。
[0087]
所述步骤s102中,基于评估关键特征样本集建立状态评估模型的具体方法包括:
[0088]
基于姿势判别特征样本集获取关键特征量的特征值,并与关键特征量建立新映射获得判别关键特征样本集;
[0089]
在所述判别关键特征样本集中依次随机抽取50%、30%和20%的数据汇总作为训练集、测试集和验证集;
[0090]
将训练集、测试集和验证集运用在多种人工神经网络上建模获得多组姿势判别模型,并比较多组姿势判别模型的模型评价指标选择出最优姿势判别模型;
[0091]
其中,模型评价指标为roc曲线的auc值。
[0092]
基于人工神经网络建模的姿势判别模型的输出结果为二分类形式,即为恰当或不恰当,简单直接,并且算法速率快,适合做实时姿势状态的判别处理。
[0093]
步骤s2、所述姿态数据采集单元实时采集目标对象的姿势数据,并将姿势数据同步反馈至姿势判别单元;
[0094]
姿势数据采集单元包括但不限于红外传感器部件,红外传感器部件实时获取目标对象的用笔姿势的角度等数据。
[0095]
步骤s3、所述姿势判别单元利用所述姿势判别模型基于所述姿势数据对所述目标对象进行姿势状态的判别,并将所述姿势状态的判别结果反馈至姿势语音预警单元;
[0096]
步骤s4、所述姿势语音预警单元根据所述姿势状态的判别结果对所述目标对象进行语音预警。
[0097]
所述判别结果包括恰当和非恰当,所述步骤s4中,对所述目标对象进行语音预警的具体方法包括:
[0098]
若判别结果为恰当,则姿势语音预警单元不作语音提示操作;
[0099]
若判别结果为非恰当,则姿势语音预警单元同步进行语音提示操作。
[0100]
本发明基于人工神经网络构建姿势判别模型用于作为评判目标对象的姿势状态的恰当与否,同时对判别样本集进行特征寻优,获得快速精准判别目标对象姿势状态的关键特征,从而提高判别姿势状态的综合准则,最终提高判别准确度,而且设置有姿势语音预警单元实现对目标对象的实时语音提醒,使得使用对象意识到不良姿势并加以纠正,循环往复养成良好的坐姿习惯。
[0101]
以上实施例仅为本技术的示例性实施例,不用于限制本技术,本技术的保护范围由权利要求书限定。本领域技术人员可以在本技术的实质和保护范围内,对本技术做出各种修改或等同替换,这种修改或等同替换也应视为落在本技术的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

