1.本发明涉及汽车预警的技术领域,尤其涉及一种基于声纹识别的弯道对向车预警方法及系统。
背景技术:
2.随着汽车行业的发展,人们对汽车的安全性能愈发重视。当前,汽车在山路行驶,特别是弯道处和隧道处,因对向视野盲区,非常出现交通事故。通常情况下,为了减少交通事故发生率,山路转弯处都会放置广角镜,给司机提供弯道对向视野,帮助判断,鉴于驾驶员驾驶习惯,广角镜起到的效果一般,且隧道处或夜间行车时,由于光线不足,广角镜没法使用,无法有效判断对向来车。同时,这种解决方式下,需要道路维护单位提前安置广角镜,受制于各地的道路管理情况,不能覆盖所有山路弯道。
3.目前,行业内也有通过车辆入网,并根据定位或v2x播报位置等方式,来做到弯道和隧道会车提醒。但该方式需要在弯道架设基础设施,而且设施昂贵,在广角镜尚未普及的情况下,搭建此类设施不太容易实现,从而达不到对向来车提醒效果。另一方面,这种方式车的双方车辆安装设备入网,来提醒会车,局限性较大。
技术实现要素:
4.本发明为解决弯道行车存在盲角,容易发生交通事故,当前解决方式成本高,局限性大的技术问题,提供一种基于声纹识别的弯道对向车预警方法及系统。
5.为解决上述技术问题,本发明的技术方案如下:
6.一种基于声纹识别的弯道对向车预警方法,其特征在于,所述方法包括:
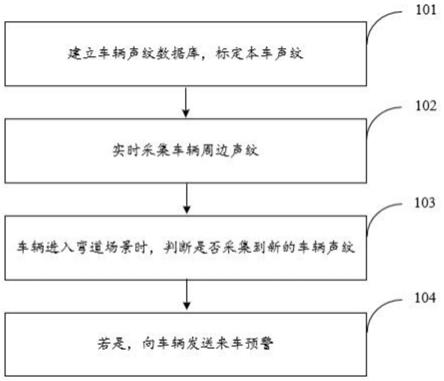
7.建立车辆声纹数据库,标定本车声纹;
8.实时采集车辆周边声纹;
9.车辆进入弯道场景时,判断是否采集到新的车辆声纹;
10.若是,向车辆发送来车预警。
11.进一步的,所述建立车辆声纹数据库,标定本车声纹包括:
12.通过预设模型采集声纹,建立声纹库;
13.根据采集到的声纹标本训练声纹库;
14.标定本车驾驶声纹,判定时去除本车声纹干扰。
15.进一步的,所述车辆声纹数据库的声纹识别采用高斯混合模型进行判定。
16.进一步的,所述实时采集车辆周边声纹包括:
17.通过车辆不同位置的声纹采集装置采集车辆周边声纹,根据声纹在各采集装置中的强度,确认声纹方向;
18.将车辆前方的声纹作为目标声纹,去除后方声纹干扰。
19.进一步的,所述车辆进入弯道场景时,判断是否采集到新的车辆声纹包括:
20.判定车辆是否进入弯道场景;
21.若是,判断是否有采集到新的车辆声纹。
22.进一步的,所述判定车辆是否进入弯道场景具体包括:
23.判断方向盘的转向角是否超过预设值;
24.若是,判定车辆进入弯道场景。
25.进一步的,所述判断是否采集到新的车辆声纹包括:
26.对车辆周边新出现的声纹进行判定,确定是否为车辆声纹;
27.若是,判定存在对向车辆。
28.进一步的,所述来车预警采用语音播报预警。
29.本发明还提供一种基于声纹识别的弯道对向车预警系统,其特征在于,该系统包括声纹采集装置、处理器和预警装置;所述声纹采集装置用于采集车辆周边声纹,所述预警装置设置在车内,用于向驾驶员提供预警信息;所述处理器用于对声纹进行处理、判定,并调用声纹采集装置和预警装置,以执行以下步骤:
30.建立车辆声纹数据库,标定本车声纹;
31.实时采集车辆周边声纹;
32.车辆进入弯道场景时,判断是否采集到新的车辆声纹;
33.若是,向车辆发送来车预警。
34.进一步的,所述声纹采集装置包括至少两个,且多个所述声纹采集装置分设在车辆的前端和后端。
35.本发明通过声纹识别的方式来判断车辆对向是否出现新的车辆声纹,进而对弯道转弯时车辆可能出现死角的情况下,对对向车进行有效预警,该方法不依赖于道路基础设施和其他车辆的设备,且覆盖绝大多数弯道,可行性和适应性高,能够稳定可靠地为驾驶员提供弯道对向车预警,增加了车辆的驾驶安全系数,提高了驾驶员的驾驶体验。
附图说明
36.图1为本发明实施例弯道对向车预警方法的结构流程图。
37.图2为本发明实施例步骤101的具体结构流程图。
38.图3为本发明实施例步骤102的具体结构流程图。
39.图4为本发明实施例步骤103的具体结构流程图。
40.图5为本发明实施例弯道对向车预警系统的结构框图。
41.图6为本发明实施例预警方法的预警应用场景。
具体实施方式
42.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
43.实施例
44.图1示出了本实施例弯道对向车预警方法的结构流程图。
45.如图1所示,本实施例提供了基于声纹识别的弯道对向车预警方法,该方法具体包括:
46.101、建立车辆声纹数据库,标定本车声纹。
47.其中,处理器在车辆进行声纹识别前,提前建立一个用于实现声纹识别的声纹库,该声纹库主要用于实现对汽车周边声纹进行识别,判断其是属于环境杂音还是其他车辆的声纹。
48.当然,不同车辆的声纹是不同的,但均处于一个阈值范围,在识别时,车辆无时无刻都会存在本车的声纹干扰,因此,在声纹识别的过程中,需要对本车的声纹进行标定,后续声纹识别的过程中,去除本车声纹的干扰。
49.102、实时采集车辆周边声纹。
50.车辆在行驶时,通过声纹采集装置,对车辆周边的声纹进行采集,并对声纹进行初步的处理,以便于后续的声纹识别操作。例如,该初步处理可以包括有:处理器识别出当前车辆所存在周边的车辆声纹,并将声纹进行保存,用于后续判断车辆周边是否出现新的车辆。
51.同样的,车辆也能够通过多个声纹采集装置的设置位置,来判断所采集的声纹所处的方位,便于判断该声纹是否来源于对向车辆,当然,若判断声纹处于汽车后方,可以认定为其为干扰,不对其进行声纹识别,进而减少处理器的识别数据,减轻处理器负担。
52.103、车辆进入弯道场景时,判断是否采集到新的车辆声纹。
53.104、若是,向车辆发送来车预警。
54.当车辆进入弯道后,处理器开启预警功能,当处理器判断当前采集到处于新的车辆声纹时,可以判定该存在有对向车辆。如图6所示,该功能应用于存在障碍物无法看清转弯后道路的弯道场景时,例如山路,可以对驾驶员进行预警,使驾驶员更好的掌握路面情况,降低交通事故发生概率,提高驾驶员的驾驶体验。
55.本实施例的好处在于,该预警方法通过声纹识别的方式来判断车辆对向是否出现新的车辆声纹,进而对弯道转弯时车辆可能出现死角的情况下,对对向车进行有效预警,该方法不依赖于道路基础设施和其他车辆的设备,且覆盖绝大多数弯道,可行性和适应性高,能够稳定可靠地为驾驶员提供弯道对向车预警,增加了车辆的驾驶安全系数,提高了驾驶员的驾驶体验。
56.图2示出了本实施例步骤101的具体结构流程图。
57.在一些实施例中,如图2所示,步骤101、建立车辆声纹数据库,标定本车声纹具体包括:
58.201、通过预设模型采集声纹,建立声纹库。
59.202、根据采集到的声纹标本训练声纹库。
60.203、标定本车驾驶声纹,判定时去除本车声纹干扰。
61.其中,处理器在声纹库建立后,根据车辆声纹来对声纹库进行训练,增加识别准确性。具体的,为了更好的使用体验,提供本实施例中声纹库的具体训练规则,具体的,本实施例的车辆声纹数据库的声纹识别采用高斯混合模型进行判定,其判定公式为:
62.λ(x)=log p(x∣gmm
spk
)
‑
log p(x∣ubm)。
63.其中,x为采集到的声音片段,spk为指定车辆类型,当λ(x)大于预设阈值时,系统判定该声音片段属于车辆声纹。该预设阈值能够根据具体预警灵敏度进行调节。
64.图3示出了本实施例步骤102的具体结构流程图。
65.在一些实施例中,如图3所示,步骤102、实时采集车辆周边声纹具体包括:
66.301、通过车辆不同位置的声纹采集装置采集车辆周边声纹,根据声纹在各采集装置中的强度,确认声纹方向。
67.302、将车辆前方的声纹作为目标声纹,去除后方声纹干扰。
68.其中,声纹采集装置至少设置有两个,且车辆的前端和后端至少设置有一个,多个声纹采集装置共同进行声纹采集,并根据特定声纹在各个声纹采集装置中的强度判断其与本车的方位。
69.在本实施例中,该声纹识别主要用于进行对向车预警,因此,在判断出声纹处于本车后方时,将其滤除,将本车前方的声纹作为目标声纹进行识别。
70.图4示出了本实施例步骤103的具体结构流程图。
71.在一些实施例中,如图4所示,步骤103、车辆进入弯道场景时,判断是否采集到新的车辆声纹具体包括:
72.401、判定车辆是否进入弯道场景;
73.402、若是,判断是否有采集到新的车辆声纹。
74.其中,弯道场景的判断存在有多种方式,例如,通过高清地图来探查车辆是否进入弯道场景,或利用车辆内的弯道传感器进行探知。优选的,在本实施例中,处理器利用车辆方向盘转向角来进行弯道场景的判定。具体的,该具体步骤为,判断方向盘的转向角是否超过预设值,若是,判定车辆进入弯道场景。该预设值可以根据预警灵敏度进行调节。
75.另一方面,在新的车辆声纹的判定方面,其具体判定条件为:
76.对车辆前方新出现的声纹进行判定,确定是否为车辆声纹;
77.若是,判定存在对向车辆。
78.更为具体的,本实施例的来车预警可以采用当前常规的预警方法,其包括但不仅限与,语音预警、座椅振动预警或蜂鸣声预警。优选的,本实施例的来车预警采用语音播报预警。
79.图5示出了本实施例中弯道对向车预警系统的结构框图。
80.如图5所示,本实施例还提供一种基于声纹识别的弯道对向车预警系统,具体的,该系统包括声纹采集装置502、处理器501和预警装置503,其中,声纹采集装置502用于采集车辆周边声纹,预警装置503设置在车内,用于向驾驶员提供预警信息,而处理器501用于对声纹进行处理、判定,并调用声纹采集装置502和预警装置503,以执行以下步骤:
81.建立车辆声纹数据库,标定本车声纹;
82.实时采集车辆周边声纹;
83.车辆进入弯道场景时,判断是否采集到新的车辆声纹;
84.若是,向车辆发送来车预警。
85.在一些实施例中,声纹采集装置502包括至少两个,且多个声纹采集装置502分设在车辆的前端和后端。
86.本实施例的弯道对向车预警系统仅仅依赖本系统自身的声音信号采集系统,不依赖于道路基础设施和其他车辆的设备,可行性和适应性非常高,基本可以覆盖绝大多数弯道同时,采用声纹识别的方式,可以不用考虑道路的光线调节,极大的提高了识别的可靠性,在隧道、地下车库或夜晚行车等场景中均可以应用。
87.显然,本发明的上述实施例仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

