1.本发明涉及一种停车位监控技术,尤其是涉及一种临时停车辅助预警监控系统。
背景技术:
2.随着我国经济的不断增长,人民生活水平的不断提高,我国汽车保有量呈现逐年增长的趋势。这就会造成车位少、停车难等情况的发生,尤其是在大型城市,此类问题会更加凸显。所以,城市开放式的停车区域也应运而生。但这种开放式停车区域无法设置在狭窄路段,并且在大型商场等人流聚集的场所附近,设置大片道路区域用于停放车辆也不切实际。因此,在这些区域,交管部门通常会设置3~5个临时停车位用于车主短时间停车以及乘客上下车使用。这样,不仅满足了车主短时间停车的需求,也有效的缓解了道路拥挤的问题。一般情况下,临时停车位的车主是不允许离开驾驶室,但是车主常常忽略了临时停车位所设定的最长停车时间,从而会被交警部门定性为违章行为,受到处罚。
3.目前,对于路边设置的临时停车位通常有人工管理和利用摄像头远程监控管理这两种管理方式。
4.人工管理完全依赖交警去管理临时停车位,会面临诸多问题。首先,依靠人工管理非常的耗时耗力,交警工作时间长,必须时刻关注车流的情况;其次,对于停车时间没有精确的把握,只是粗略的对停车时长进行估计,而没有一个合理的计时方案;最后,对于停靠期间离车的车主,一旦超过了最长停车时间,交警无法快速找到车主,让其驶离车位。
5.利用摄像头进行远程监控管理,可以省去大量的人工管理成本,减轻了相关部门的管理压力。但远程监控本质上也是依靠工作人员根据视频流进行人工筛选,容易造成违法行为的遗漏以及误判。从车主的角度考虑,远程监控管理系统虽然起到了违法行为管理的目的,但是却没有违法行为警示的功能。这就使得许多车主收到管理部门的通知时,证明其违法行为已经产生。
技术实现要素:
6.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种临时停车辅助预警监控系统,实时性好,准确性高,客观性强,节省人力,投入成本低;可靠性高。
7.本发明的目的可以通过以下技术方案来实现:
8.一种临时停车辅助预警监控系统,包括:
9.视频采集模块,用于通过摄像头采集临时停车位周围的实时视频;
10.视频分析模块,包括位置分析单元和车牌识别单元,所述的位置分析单元用于根据实时视频中获取车辆位置和停车位位置,所述的车牌识别单元用于根据实时视频获取车辆的车牌号码信息;
11.违章判别模块,用于根据车辆位置和停车位位置,通过违章判别步骤判别停靠在停车位的车辆是否违章,若是则生成预警指令;
12.预警提示模块,用于接收预警指令,并执行预警操作;
13.所述的监控系统能够自动监控车辆停靠是否违章,并实时告知驾驶人员违章,表示其违法行为已经产生,客观性好,节省人力。
14.进一步地,所述的车辆位置和停车位位置的获取过程包括:
15.通过训练好的视觉深度学习网络提取实时视频中车辆的第一检测框以及停车位的第二检测框。
16.进一步地,所述的违章判别步骤包括:
17.实时判断第一检测框和第二检测框的重叠率k是否大于第一阈值,若是则开始计时,否则停止操作,所述的重叠率k的计算公式为:
[0018][0019]
其中,s1为第二检测框面积,s2为第一检测框和第二检测框的重叠面积;
[0020]
由小到大依次设定第二阈值、第三阈值和第四阈值,根据计时时长执行预警提示操作,包括:
[0021]
所述的计时时长介于第二阈值和第三阈值之间时,生成一级预警指令;
[0022]
所述的计时时长介于第三阈值和第四阈值之间时,生成二级预警指令;
[0023]
所述的计时时长大于第四阈值时,判定车辆违章,生成三级预警指令;
[0024]
所述的预警提示模块接收到一级、二级和三级预警指令后,分别执行一级、二级和三级预警操作;
[0025]
根据第一检测框和第二检测框的重叠率来判断车辆是否停靠在停车位,一般车辆驶入路边停车位时,通常会采用侧方位的方式完成车辆的停靠,在侧方位停车这一连续的动作中,所述的车辆与停车位的重叠面积时刻发生变化,当重叠率大于第一阈值,证明车辆已经驶入停车位,计算简单且受环境因素的干扰小,可靠性高;
[0026]
同时根据车辆停靠在停车位的时长,设置不同的预警级别,既可提醒车主避免违章停车的行为,也可以对长时间停车的车主做出相应的处罚,提高了监控效率。
[0027]
进一步地,所述的预警提示模块包括语音提示单元、身份确认单元、网络提示单元以及违章存档单元;
[0028]
所述的预警提示模块用于语音播报提示信息;
[0029]
所述的身份确认单元根据车牌号码信息查询车主的身份信息;
[0030]
所述的网络提示单元用于通过根据车主的身份信息,通过通讯网络向车主所持有的移动终端发送提示信息;
[0031]
所述的违章存档单元用于存储和上传违章车辆的车牌号码信息;
[0032]
进一步地,所述的一级预警操作包括:语音播报提示信息。
[0033]
进一步地,所述的二级预警操作包括:语音播报提示信息,向车主所持有的移动终端发送提示信息。
[0034]
进一步地,所述的三级预警操作包括:语音播报提示信息,向车主所持有的移动终端发送提示信息,存储和上传违章车辆的车牌号码信息;
[0035]
通过语音播报以及网络通讯的方式提醒车辆驾驶人员,有效提醒车主,避免其产生或停止违章停车的行为。
[0036]
进一步地,所述的视觉深度学习网络为yolov4网络,所述的yolov4网络中,采用
soft
‑
nms进行非极值抑制,获取检测框,进一步提高遮挡情况下识别的检测框的准确率;
[0037]
利用yolov4网络提取视频中停车位和车辆的检测框,不仅降低了车辆的误检率和漏检率,同时也不需要为每一个停车位配备摄像头,只需所有停车范围的前方安装一个摄像头即可,大大节省了材料成本。
[0038]
进一步地,训练视觉深度学习网络的损失函数l为replusion loss函数,计算公式为:
[0039]
l=l
attr
l
repgt
l
repbox
[0040]
其中,l
attr
为预测框与真实目标框所产生的损失值,l
repgt
为预测框与相邻真实目标框所产生的损失值,l
repbox
为预测框与相邻不是预测同一真实目标的预测框所产生的损失值;
[0041]
在临时停车的场景下,所述的车辆的误检和漏检大多数情况下是由于车辆之间的遮挡引起的,即类内遮挡引起的误差占比较大,类间遮挡引起的误差可以忽略不计,l
attr
为吸引损失函数,利用吸引损失函数减少预测框与真实框之间的距离,l
repgt
和l
repbox
为两个排斥损失函数,利用排斥损失函数,使预测框远离其余目标的真实框,使不同车辆的预测框之间保持最大距离,降低误检率;
[0042]
进一步地,所述的l
attr
的计算公式为:
[0043][0044]
其中,p为所有预测框的集合,p
为所有与真实框重合度大于0.5的预测框的集合,b
p
为p中的某一个具体的预测框,为某个预测框重叠程度最大的真实框;
[0045]
所述的l
repgt
的计算公式为:
[0046][0047]
其中,代表某个预测框重叠程度第二大的真实框,为b
p
和的交并比;
[0048]
所述的l
repbox
的计算公式为:
[0049][0050]
其中,为不同的预测框之间的交并比,α为恒等式的函数和,ε为常数。
[0051]
与现有技术相比,本发明具有以如下有益效果:
[0052]
(1)本发明监控系统包括视频采集模块、视频分析模块、违章判别模块和预警提示模块,视频采集模块采集临时停车位周围的实时视频,视频分析模块包括位置分析单元和车牌识别单元,位置分析单元用于根据实时视频中获取车辆位置和停车位位置,车牌识别
单元根据实时视频获取车辆的车牌号码信息,违章判别模块根据车辆位置和停车位位置,通过违章判别步骤判别停靠在停车位的车辆是否违章,若是则生成预警指令;预警提示模块接收预警指令,并执行预警操作,监控系统能够自动监控车辆停靠是否违章,并实时告知驾驶人员违章,表示其违法行为已经产生,克服了传统的人工管理和远程监控管理的缺点,实时性好,准确性高,客观性强,节省人力;
[0053]
(2)本发明通过训练好的yolov4网络提取实时视频中车辆的第一检测框以及停车位的第二检测框,不仅降低了车辆的误检率和漏检率,同时也不需要为每一个停车位配备摄像头,只需所有停车范围的前方安装一个摄像头即可,利用道边摄像头便可以很好的解决临时停车位难以管理的问题,无需增设其他路基设备,多个车位可以共用一个摄像头,部署便捷,投入成本低;
[0054]
(3)本发明实时判断第一检测框和第二检测框的重叠率k是否大于第一阈值,若是则开始计时,否则停止操作,一般车辆驶入路边停车位时,通常会采用侧方位的方式完成车辆的停靠,在侧方位停车这一连续的动作中,车辆与停车位的重叠面积时刻发生变化,当重叠率大于第一阈值,证明车辆已经驶入停车位,根据第一检测框和第二检测框的重叠率来判断车辆是否停靠在停车位,计算简单且受环境因素的干扰小,可靠性高;
[0055]
(4)本发明由小到大依次设定第二阈值、第三阈值和第四阈值,计时时长介于第二阈值和第三阈值之间时,生成一级预警指令,计时时长介于第三阈值和第四阈值之间时,生成二级预警指令,计时时长大于第四阈值时,判定车辆违章,生成三级预警指令,预警提示模块接收到一级、二级和三级预警指令后,分别执行一级、二级和三级预警操作,根据车辆停靠在停车位的时长,设置不同的预警级别,既可提醒车主避免违章停车的行为,也可以对长时间停车的车主做出相应的处罚,提高了监控效率;
[0056]
(5)本发明从停车车主的角度考虑,通过语音播报以及网络通讯的方式提醒车辆驾驶人员,有效提醒车主,避免其产生或停止违章停车的行为;
[0057]
(6)本发明训练yolov4网络的损失函数为replusion loss函数,replusion loss函数加入了吸引损失函数和排斥损失函数,使预测框更加接近其对应的重叠程度最大真实框,同时保证预测框远离与其重叠程度第二大的真实框,并且使不同目标的多个预测框之间保持最大的距离,误检率低。
附图说明
[0058]
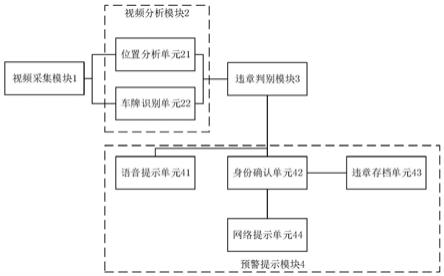
图1为本发明的系统结构示意图;
[0059]
图2为临时停车场景示意图;
[0060]
图3为车辆部分车身驶入停车位的示意图;
[0061]
图4为车辆车身完全驶入停车位的示意图。
具体实施方式
[0062]
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0063]
一种临时停车辅助预警监控系统,如图1和图2,包括:
[0064]
视频采集模块1,用于通过摄像头采集临时停车位周围的实时视频;
[0065]
视频分析模块2,包括位置分析单元21和车牌识别单元22,位置分析单元21用于根据实时视频中获取车辆位置和停车位位置,车牌识别单元22用于根据实时视频获取车辆的车牌号码信息;
[0066]
违章判别模块3,用于根据车辆位置和停车位位置,通过违章判别步骤判别停靠在停车位的车辆是否违章,若是则生成预警指令;
[0067]
预警提示模块4,用于接收预警指令,并执行预警操作;
[0068]
监控系统能够自动监控车辆停靠是否违章,并实时告知驾驶人员违章,表示其违法行为已经产生,客观性好,节省人力。
[0069]
车辆位置和停车位位置的获取过程包括:
[0070]
通过训练好的视觉深度学习网络提取实时视频中车辆的第一检测框以及停车位的第二检测框。
[0071]
违章判别步骤包括:
[0072]
实时判断重叠率是否大于第一阈值,若是则开始计时,否则停止操作,,重叠率k的计算公式为:
[0073][0074]
其中,s1为第二检测框面积,s2为第一检测框和第二检测框的重叠面积;
[0075]
根据计时时长执行预警提示操作,包括:
[0076]
计时时长介于180s和240s之间时,生成一级预警指令;
[0077]
计时时长介于240s和300s之间时,生成二级预警指令;
[0078]
计时时长大于240s时,判定车辆违章,生成三级预警指令;
[0079]
预警提示模块4接收到一级、二级和三级预警指令后,分别执行一级、二级和三级预警操作;
[0080]
根据第一检测框和第二检测框的重叠率来判断车辆是否停靠在停车位,如图3和图4,一般车辆驶入路边停车位时,通常会采用侧方位的方式完成车辆的停靠,在侧方位停车这一连续的动作中,车辆与停车位的重叠面积时刻发生变化,当重叠率大于第一阈值,证明车辆已经驶入停车位,计算简单且受环境因素的干扰小,可靠性高;
[0081]
同时根据车辆停靠在停车位的时长,设置不同的预警级别,既可提醒车主避免违章停车的行为,也可以对长时间停车的车主做出相应的处罚,提高了监控效率。
[0082]
预警提示模块4包括语音提示单元41、身份确认单元42、网络提示单元44以及违章存档单元43;
[0083]
预警提示模块4用于语音播报提示信息;
[0084]
身份确认单元42根据车牌号码信息查询车主的身份信息;
[0085]
网络提示单元44用于通过根据车主的身份信息,通过通讯网络向车主所持有的移动终端发送提示信息;
[0086]
违章存档单元43用于存储和上传违章车辆的车牌号码信息;
[0087]
一级预警操作包括:语音播报提示信息。
[0088]
二级预警操作包括:语音播报提示信息,向车主所持有的移动终端发送提示信息。
[0089]
三级预警操作包括:语音播报提示信息,向车主所持有的移动终端发送提示信息,存储和上传违章车辆的车牌号码信息;
[0090]
通过语音播报以及网络通讯的方式提醒车辆驾驶人员,有效提醒车主,避免其产生或停止违章停车的行为。
[0091]
视觉深度学习网络为yolov4网络,yolov4网络利用cspdarknet53作为主干网络,通过不断地压缩图片的长和宽以及增加通道数,得到不同深度的特征层,再利用spp结构和panet结构当中的上采样和下采样对图片的信息进行不断地融合,得到不同尺度的特征图,对得到的特征进行整合,得到最终的输出结果,yolov4网络中,采用soft
‑
nms进行非极值抑制,获取检测框,进一步提高遮挡情况下识别的检测框的准确率;
[0092]
利用yolov4网络提取视频中停车位和车辆的检测框,不仅降低了车辆的误检率和漏检率,同时也不需要为每一个停车位配备摄像头,只需所有停车范围的前方安装一个摄像头即可,大大节省了材料成本。
[0093]
训练视觉深度学习网络的损失函数l为replusion loss函数,计算公式为:
[0094]
l=l
attr
l
repgt
l
repbox
[0095]
其中,l
attr
为预测框与真实目标框所产生的损失值,l
repgt
为预测框与相邻真实目标框所产生的损失值,l
repbox
为预测框与相邻不是预测同一真实目标的预测框所产生的损失值;
[0096]
在临时停车的场景下,车辆的误检和漏检大多数情况下是由于车辆之间的遮挡引起的,即类内遮挡引起的误差占比较大,类间遮挡引起的误差可以忽略不计,l
attr
为吸引损失函数,利用吸引损失函数减少预测框与真实框之间的距离,l
repgt
和l
repbox
为两个排斥损失函数,利用排斥损失函数,使预测框远离其余目标的真实框,使不同车辆的预测框之间保持最大距离,降低误检率。
[0097]
l
attr
的计算公式为:
[0098][0099]
其中,p为所有预测框的集合,p
为所有与真实框重合度大于0.5的预测框的集合,b
p
为p中的某一个具体的预测框,为某个预测框重叠程度最大的真实框;
[0100]
l
repgt
的计算公式为:
[0101][0102]
其中,代表某个预测框重叠程度第二大的真实框,为b
p
和的交并比;
[0103]
l
repbox
的计算公式为:
[0104]
[0105]
其中,为不同的预测框之间的交并比,α为恒等式的函数和,ε为常数。
[0106]
车牌识别单元22通过现有的视觉神经网络,对实时视频中的车牌位置进行粗定位、精定位以及倾斜校正处理,得到车牌精确位置图像,再对车牌精确位置图像进行滤波和二值化处理,得到车牌号码信息。
[0107]
本实施例提出了一种临时停车辅助预警监控系统,克服了传统的人工管理和远程监控管理的缺点,利用实时性和准确性都比较优秀的深度学习网络,进行临时停车位的管理,该系统部署便捷,投入成本低,利用道边摄像头便可以很好的解决临时停车位难以管理的问题,无需增设其他路基设备,多个车位可以共用一个摄像头,便达到很好的管理效果,大大节省了硬件成本;
[0108]
而且,该监控系统兼顾了管理部门和车主两方面因素,从管理部门的角度出发,可以节省大量的人力和财力,对车辆即将发生的违停行为起到警示作用,以及对已经发生的违停行为进行相应的处罚,并记录系统存档,从停车车主的角度考虑,传统的远程监控管理系统当车主收到管理部门的通知时,证明其违法行为已经产生。本发明增加了预警功能,根据停车时长执行三个级别的预警操作,给车主充分的时间将车辆驶离停车位,从而避免违法行为的发生。
[0109]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

