1.本发明属于交通安全控制领域,具体涉及一种基于车辆路径信息的城市道路网信号控制方法与装置。
背景技术:
2.随着智能网联交通的不断发展,城市道路网中的车辆需求信息可以被提前获取,将车辆的需求路径及时间信息应用于城市道路网信号优化中,能有效降低延误,提升路网服务水平。因此,基于车辆路径信息的城市道路网信号控制方案研究具有重要意义。
3.现有城市网络信号控制研究大多以车辆群体为研究对象,采用ltm(link transmission model)模型、sf(store
‑
and
‑
forward model)模型等中观交通仿真模型对交通状态进行描述,在此基础上优化控制方案。这些优化策略具有一定的实用性,但相对粗糙,不能反映车辆个体在路网上的具体行驶及延误情况;信号控制变量大多为固定相位方案下的绿灯时长,不够灵活。因此,可以认为,现有技术对于城市道路网信号控制的适应性是不足的。
技术实现要素:
4.发明目的:针对现有方法的不足,本发明的目的在于基于车辆目标路径、需求产生时间等数据,以延误最小化为目标,优化城市道路网各交叉口的信号控制方案,提升路网服务水平。
5.技术方案:为实现以上发明目的,本发明采用如下技术方案:
6.一种基于车辆路径信息的城市道路网信号控制方法,包括以下步骤:
7.步骤1,获取目标时段内路网中所有车辆的目标路径数据、需求产生时间数据、速度数据,路网中路段长度数据、交叉口车道数数据、冲突相位数据;
8.步骤2,进行第一次迭代,记录迭代次数m=1,依据步骤1获取的数据,初始化每个交叉口的车辆到达时间;
9.步骤3,将同一车道的到达车辆聚类为车队,构建并求解以延误最小化为目标的单点信号控制模型,逐个交叉口优化车辆离去时间;
10.步骤4,依据车辆离去时间和步骤1获取的数据,计算第m 1次迭代每个交叉口的车辆到达时间,若车辆到达时间收敛,进入步骤5,若不收敛,m=m 1,返回步骤3;
11.步骤5,将第m次迭代的车辆到达与离去时间作为最终车辆到达与离去时间,依据交叉口车辆离去时间数据,获得交叉口信号控制方案。
12.作为优选,所述步骤2中初始化每个交叉口的车辆到达时间计算公式为:
[0013][0014]
a
m,i,1
=a
i,1
[0015]
其中,a
m,i,k
为第m次迭代车辆i到达其行驶路径中第k个交叉口的时刻,a
i,1
为车辆i
的需求产生时间,n为车辆i的行驶路径中经过的交叉口数量;l
k,i
为车辆i到达其行驶路径中第k个交叉口与第k
‑
1个交叉口的间距;s为车辆速度;t
de,max
为车辆在单个交叉口的最大许可延误时间。
[0016]
作为优选,所述步骤3中将同一车道的到达车辆聚类为车队的方法为:
[0017]
将交叉口j同一车道的车辆按到达时间排序,令为交叉口j第l车道第x辆车的到达时间;第l车道第h车队的特征值包括车队车辆数车队到达时间车队离去时间车队持续时间
[0018]
以每辆车为一个车队进行初始化,则
[0019]
若则将车辆x纳入车队h,车辆x为车队h的第n
x
辆车,删除车队x,其中t
th
为饱和车头时距,g
min
为最小绿灯时间。
[0020]
作为优选,所述步骤3中单点信号控制模型以总延误最小化为目标,包含到达时间与离去时间约束、先入先出约束、冲突流向约束、0
‑
1变量的关联约束。
[0021]
作为优选,所述单点信号控制模型的目标函数表示为:
[0022][0023][0024]
其中,d3la4
l,h
为第l车道第h车队的延误时间。
[0025]
作为优选,所述到达时间与离去时间约束表示为:
[0026][0027]
其中,t
de,max
为单交叉口单车辆最大允许延误时间;
[0028]
先入先出约束表示为:
[0029][0030]
冲突流向约束表示为:
[0031][0032]
当时,
[0033]
当时,
[0034]
当时,
[0035][0036][0037]
u
(l1,h1),(l2,h2)
=0,1
[0038]
其中,定义s
l1
⊥
s
l2
为车道l1与车道l2对应流向相互冲突;t
co,max
为临界冲突时间,认为两个冲突车队的到达时间差大于临界冲突时间时,先到达的车队先离开;t
in
为绿灯时间间隔,t
wa
为启动损失时间;m为常系数;u
(l1,h1),(l2,h2)
为0
‑
1变量,u
(l1,h1),(l2,h2)
=0,表示车队(l1,h1)比车队(l2,h2)后离开交叉口,u
(l1,h1),(l2,h2)
=1,表示车队(l2,h2)比车队(l1,h1)后离开交叉口;
[0039]0‑
1变量的关联约束表示为:
[0040]
且且且u
(l1,h1),(l2,h2)
‑
u
(l1,h1 1),(l2,h2)
≥0。
[0041]
作为优选,所述步骤3中车辆离去时间的计算公式表示为:
[0042][0043]
其中,为交叉口j第l车道第x辆车的离去时间,该车为车队(l,h)的第n
x
辆车。
[0044]
作为优选,所述步骤4中第m 1次迭代每个交叉口车辆到达时间的计算公式为:
[0045][0046]
其中,d
m,i,k
‑1为第m次迭代车辆i离开其行驶路径中第k
‑
1个交叉口的时刻;
[0047]
车辆到达时间收敛条件表示为:
[0048]
|a
m 1,i,k
‑
a
m,i,k
|<δ
[0049]
其中,δ为收敛阈值。
[0050]
作为优选,所述步骤5中交叉口信号控制方案的获取原则为:
[0051]
第m次迭代车辆到达与离去时间数据为最终车辆到达与离去时间,表示为:
[0052]
a
i,k
=a
m,i,k
[0053]
d
i,k
=d
m,i,k
[0054]
其中,a
i,k
为车辆i到达其行驶路径中第k个交叉口的时刻,d
i,k
为车辆i离开其行驶路径中第k个交叉口的时刻;
[0055]
对于交叉口j,若t时刻放行流向f
i,j
;f
i,j
为车辆i在交叉口j的流向;
[0056]
其中,当p
i,k
=j时,f
i,j
=(p
i,k
‑1,p
i,k 1
);p
i,k
为车辆i行驶路径中第k个交叉口的编号;为车辆i在交叉口j的离去时间。
[0057]
基于相同的发明构思,本发明提供一种基于车辆路径信息的城市道路网信号控制装置,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述计算机程序被加载至处理器时实现所述的基于车辆路径信息的城市道路网信号控制方法。
[0058]
本发明采用以上技术方案与现有技术相比,具有以下有益效果:
[0059]
本发明以城市道路网信号控制方案为研究对象,基于车辆路径信息,刻画车辆在目标路径各交叉口的到达和离去情况,结合各交叉口运行情况,提出以延误最小化为目标的单点信号控制模型,优化各交叉口信号控制方案,通过迭代得到路网中车辆在目标路径各交叉口的运行情况和路网最优信号控制方案,提升路网服务水平。本发明把车辆看作单独个体,可以更精准的对其通行情况展开分析,对网络信号控制的优化更趋于精细化。基于
车辆路径信息的网络控制,未来可与车辆寻路优化结合分析,提出更为系统全面的控制策略,具有一定的实用价值。
附图说明
[0060]
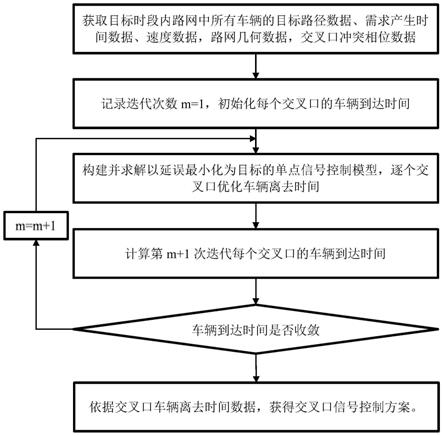
图1为本发明实施例的方法流程图;
[0061]
图2为本发明实施例中示例的路网示意图;
[0062]
图3为本发明实施例中示例的交叉口车辆到达
‑
离去时刻图。
具体实施方式
[0063]
下面结合附图和具体实施例对本发明进行详细阐述,本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0064]
本发明实施例公开的一种基于车辆路径信息的城市道路网信号控制方法,如图1所示,具体包括以下步骤:
[0065]
步骤1,获取目标时段内路网中所有车辆的目标路径数据、需求产生时间数据、速度数据,路网几何数据,冲突相位数据;所述路网几何数据包括:路网中路段长度数据、交叉口车道数数据。
[0066]
步骤2,进行第一次迭代,记录迭代次数m=1,依据步骤1获取的数据,初始化每个交叉口的车辆到达时间,计算公式为:
[0067][0068]
a
m,i,1
=a
i,1
[0069]
其中,a
m,i,k
为第m次迭代车辆i到达其行驶路径中第k个交叉口的时刻,a
i,1
为车辆i的需求产生时间,n为车辆i的行驶路径中经过的交叉口数量;l
k,i
为车辆i到达其行驶路径中第k个交叉口与第k
‑
1个交叉口的间距;s为车辆速度;t
de,max
为车辆在单个交叉口的最大许可延误时间。
[0070]
步骤3,将同一车道的到达车辆聚类为车队,依据车辆到达时间数据、交叉口车道数据、冲突相位数据,构建并求解以延误最小化为目标的单点信号控制模型,逐个交叉口优化车辆离去时间。
[0071]
将同一车道的到达车辆聚类为车队的方法为:
[0072]
将交叉口j同一车道的车辆按到达时间排序,令为交叉口j第l车道第x辆车的到达时间;第l车道第h车队的特征值包括车队车辆数车队到达时间车队离去时间车队持续时间
[0073]
以每辆车为一个车队进行初始化,则
[0074]
若则将车辆x纳入车队h,车辆x为车队h的第n
x
辆车,删除车队x,其中t
th
为
饱和车头时距,g
mi)
为最小绿灯时间。
[0075]
所述单点信号控制模型以总延误最小化为目标,包含到达时间与离去时间约束、先入先出约束、冲突流向约束、0
‑
1变量的关联约束。
[0076]
所述单点信号控制模型的目标函数表示为:
[0077][0078][0079]
其中,delay
l,h
为第l车道第h车队的延误时间。
[0080]
所述到达时间与离去时间约束表示为:
[0081][0082]
其中,y
de,max
为单交叉口单车辆最大允许延误时间;
[0083]
先入先出约束表示为:
[0084][0085]
冲突流向约束表示为:
[0086][0087]
当时,
[0088]
当时,
[0089]
当时,
[0090][0091][0092]
u
(l1,h1),(l2,h2)
=0,1
[0093]
其中,定义s
l1
⊥
s
l2
为车道l1与车道l2对应流向相互冲突;t
co,max
为临界冲突时间,认为两个冲突车队的到达时间差大于临界冲突时间时,先到达的车队先离开;t
in
为绿灯时间间隔,t
wa
为启动损失时间;m为充分大的常系数,本实施例中,m取值为10000;u
(l1,h1),(l2,h2)
为0
‑
1变量,u
(l1,h1),(l2,h2)
=0,表示车队(l1,h1)比车队(l2,h2)后离开交叉口,u
(l1,h1),(l2,h2)
=1,表示车队(l2,h2)比车队(l1,h1)后离开交叉口;
[0094]0‑
1变量的关联约束表示为:
[0095]
且且且u
(l1,h1),(l2,h2)
‑
u
(l1,h1 1),(l2,h2)
≥0。
[0096]
所述步骤3中车辆离去时间的计算公式表示为:
[0097][0098]
其中,为交叉口j第l车道第x辆车的离去时间,该车为车队(l,h)的第n
x
辆车。
[0099]
步骤4,依据路网几何数据、车辆速度数据和优化后的车辆离去时间数据,计算第m 1次迭代每个交叉口的车辆到达时间,若车辆到达时间收敛,进入步骤5,若不收敛,m=m 1,返回步骤3。
[0100]
第m 1次迭代每个交叉口车辆到达时间的计算公式为:
[0101][0102]
其中,d
m,i,k
‑1为第m次迭代车辆i离开其行驶路径中第k
‑
1个交叉口的时刻;
[0103]
车辆到达时间收敛条件表示为:
[0104]
|a
m 1,i,k
‑
a
m,i,k
|<δ
[0105]
其中,δ为收敛阈值,本实施例中取值为3s。
[0106]
步骤5,将第m次迭代的车辆到达与离去时间作为最终车辆到达与离去时间,依据交叉口车辆离去时间数据,获得交叉口信号控制方案。
[0107]
交叉口信号控制方案的获取原则为:
[0108]
第m次迭代车辆到达与离去时间数据为最终车辆到达与离去时间,表示为:
[0109]
a
i,k
=a
m,i,k
[0110]
d
i,k
=d
m,i,k
[0111]
其中,a
i,k
为车辆i到达其行驶路径中第k个交叉口的时刻,d
i,k
为车辆i离开其行驶路径中第k个交叉口的时刻;
[0112]
对于交叉口j,若t时刻放行流向f
i,j
;f
i,j
为车辆i在交叉口j的流向;
[0113]
其中,当p
i,k
=j时,f
i,j
=(p
i,k
‑1,p
i,k 1
);p
i,k
为车辆i行驶路径中第k个交叉口的编号;为车辆i在交叉口j的离去时间。
[0114]
基于相同的发明构思,本发明实施例提供一种基于车辆路径信息的城市道路网信号控制装置,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述计算机程序被加载至处理器时实现所述的基于车辆路径信息的城市道路网信号控制方法。
[0115]
下面结合一个具体算例对本发明实施例的方法做进一步说明:
[0116]
(1)设计路网概况
[0117]
设计路网包含21个节点,其中,交叉口1
‑
9为优化目标交叉口,交叉口10
‑
21为源头/终点交叉口。路网几何情况如图2所示。
[0118]
(2)交通参数与控制参数
[0119]
交通参数与控制参数如表1所示。
[0120]
表1交通参数与控制参数设置
[0121][0122]
(3)车辆路径数据
[0123]
路网中一共有15条路径需求,各路径途径节点交叉口如表2所示,车辆需求产生时间范围为0
‑
300s。
[0124]
表2车辆路径信息
[0125][0126]
[0127]
(4)优化效果
[0128]
优化后,路网中各交叉口冲突流向的车辆能稳定有序的通过,车辆延误情况较好。目标优化交叉口1
‑
9的车辆到达与离去时间情况如图3所示。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

