1.本公开涉及一种通信装置、通信系统、车辆、通信程序以及通信方法。
背景技术:
2.在专利文献1中,公开了一种使用了车车间通信的驾驶辅助技术。具体而言,公开了一种以从其他车辆接收到的信号为基础而将与该其他车辆碰撞的危险性通知给驾驶员的驾驶辅助技术。
3.在先技术文献
4.专利文献
5.专利文献1:日本特开2019
‑
185124号公报
6.非专利文献
7.非专利文献1:european telecommunication standards institute(etsi,欧洲电信标准协会)en 302 637
‑
3v1.2.1(2014
‑
09)
技术实现要素:
8.发明所要解决的课题
9.在专利文献1所记载的技术中,存在对于驾驶员而言不需要的信息从其他车辆被传输过来的担心。
10.本公开的目的在于,减少对于传输目标车辆的驾驶员而言不需要的信息的传输。
11.用于解决课题的方法
12.本公开所涉及的通信装置为被搭载于第一车辆上的通信装置,并具备:通信部,其与被搭载于所述第一车辆以外的车辆上的通信装置进行无线通信;控制部,其在通过所述通信部而接收到从被搭载于与所述第一车辆不同的第二车辆上的通信装置所传输的、表示事件的发生的事件信息时,对与所述第一车辆以及所述第二车辆不同的第三车辆的状况进行判断,并基于判断的结果,而对是否使所述通信部实施所述事件信息向被搭载于所述第三车辆上的通信装置的传输进行判断。
13.本公开所涉及的通信程序使被搭载于第一车辆上的计算机执行如下的动作,所述动作包括:当通过所述第一车辆而接收到从与所述第一车辆不同的第二车辆所传输的、表示事件的发生的事件信息时,对与所述第一车辆以及所述第二车辆不同的第三车辆的状况进行判断;基于判断的结果,而对是否使所述第一车辆实施所述事件信息向所述第三车辆的传输进行判断。
14.本公开所涉及的通信方法包括:从与第一车辆不同的第二车辆向所述第一车辆传输表示事件的发生的事件信息;通过所述第一车辆而对与所述第一车辆以及所述第二车辆不同的第三车辆的状况进行判断;通过所述第一车辆并基于判断的结果来对是否实施所述事件信息向所述第三车辆的传输进行判断。
15.发明效果
16.根据本公开,能够减少对于传输目标车辆的驾驶员而言不需要的信息的传输。
附图说明
17.图1为表示本公开的实施方式所涉及的通信系统的结构的图。
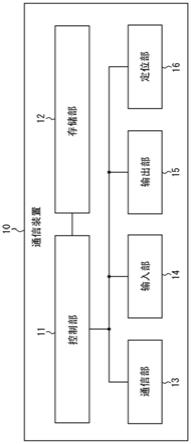
18.图2为表示本公开的实施方式所涉及的通信装置的结构的框图。
19.图3为表示本公开的实施方式所涉及的通信装置的安装例的框图。
20.图4为表示本公开的实施方式所涉及的通信装置中的信息的流程的图。
21.图5为表示由本公开的实施方式所涉及的通信装置的控制部实施的处理的流程图。
22.图6为表示由本公开的实施方式所涉及的通信装置的控制部实施的处理的流程图。
23.图7为表示由本公开的实施方式所涉及的通信装置的控制部实施的处理的流程图。
24.图8为表示由本公开的实施方式所涉及的通信装置的控制部实施的处理的流程图。
25.图9为表示由本公开的实施方式所涉及的通信装置的控制部实施的处理的流程图。
26.图10为表示由本公开的实施方式所涉及的通信装置的控制部实施的处理的流程图。
27.图11为表示由本公开的实施方式所涉及的通信装置的控制部实施的处理的流程图。
28.图12为表示由本公开的实施方式所涉及的通信装置的控制部实施的处理的流程图。
29.图13为表示由本公开的实施方式所涉及的通信装置的控制部实施的处理的流程图。
30.图14为表示在本公开的实施方式所涉及的通信系统中事件为紧急制动的情况的图。
31.图15为表示在本公开的实施方式所涉及的通信系统中事件为道路施工的情况的图。
32.图16为表示在本公开的实施方式所涉及的通信系统中事件为紧急制动的情况的图。
33.图17为表示在本公开的实施方式所涉及的通信系统中事件为应急车辆的接近的情况的图。
34.图18为表示在本公开的实施方式所涉及的通信系统中事件为紧急制动的情况的图。
具体实施方式
35.以下,参照附图,对本公开的实施方式进行说明。
36.在各个图中,对于相同或相当的部分而标记相同的符号。在本实施方式的说明中,对于相同或相当的部分而适当地省略或简化说明。
37.参照图1,对本实施方式所涉及的通信系统1的结构进行说明。
38.本实施方式所涉及的通信系统1具备被搭载于第一车辆vh1上的通信装置10、被搭载于与第一车辆vh1不同的第二车辆vh2上的通信装置20、和被搭载于与第一车辆vh1以及第二车辆vh2不同的第三车辆vh3上的通信装置30。在图1中,虚线为车道的划分线。虽然在图1中,第一车辆vh1、第二车辆vh2和第三车辆vh3行驶在相同的车道上,但本实施方式并未被限定于此,各车辆也可以行驶在不同的车道上。
39.第一车辆vh1的通信装置10为,经由自组网络等多跳无线网络而与第二车辆vh2的通信装置20以及第三车辆vh3的通信装置30进行车车间通信的车车间通信装置。即,通信装置10、通信装置20以及通信装置30通过多跳方式来传输信息。在本实施方式中,通过多跳方式而从通信装置20被传输的、对事件的发生进行通知的消息根据需要而从通信装置10进一步向通信装置30被传输。虽然该消息为任意形式的消息,但在本实施方式中为由非专利文献1所规定的denm。“denm”为decentralized environmental notification message(分散式环境通知消息)的缩写。
40.第一车辆vh1、第二车辆vh2以及第三车辆vh3分别为例如汽油车、柴油车、hv、phv、ev或fcv等任意种类的汽车。“hv”为hybrid vehicle(混合动力汽车)的缩写。“phv”为plug
‑
in hybrid vehicle(插电式混合动力车)的缩写。“ev”为electric vehicle(电动汽车)的缩写。“fcv”为fuel cell vehicle(燃料电池汽车)的缩写。虽然第一车辆vh1、第二车辆vh2以及第三车辆vh3在本实施方式中分别由驾驶员驾驶,但也可以以任意的等级来使驾驶自动化。自动化的等级例如为sae的等级划分中的等级1至等级5中的任意一个。“sae”为society of automotive engineers(美国汽车工程师协会)的缩写。第一车辆vh1、第二车辆vh2以及第三车辆vh3也可以分别为maas专用车辆。“maas”为mobility as a service(移动即服务)的缩写。
41.参照图1,对本实施方式的概要进行说明。
42.在本实施方式所涉及的通信系统1中,表示事件的发生的事件信息从与第一车辆vh1不同的第二车辆vh2而被传输至第一车辆vh1。通过第一车辆vh1而对与第一车辆vh1以及第二车辆vh2不同的第三车辆vh3的状况进行判断。通过第一车辆vh1,并基于判断的结果而对是否实施事件信息向第三车辆vh3的传输进行判断。在本实施方式中,通过第一车辆vh1,并基于判断的结果而对事件信息向第三车辆vh3的传输的必要程度进行评价,并根据被评价出的必要程度来对是否实施传输进行判断。
43.在本实施方式中,“事件”是指,在道路上发生的事态。在事件中,例如包括道路施工、紧急制动、或应急车辆的接近。应急车辆例如为急救车、消防车或巡逻车。
44.在本实施方式中,“事件信息”是指表示事件的发生的信息。在事件信息中,例如包括表示事件的内容的信息、表示事件的发生位置的信息、或者表示作为发生了事件的车道的事件车道的信息。在事件信息中,也可以包括表示从第一车辆vh1观察到的事件的发生位置的方位的信息。在事件为应急车辆的接近的情况下,表示事件的速度的信息也可以被包含在事件信息中。
45.在本实施方式中,“传输的必要程度”是指,表示是否需要传输的程度的指标。虽然
传输的必要程度也可以由任意的方法来计算出,但例如通过分数计算、阶段评价或者评价函数而被计算出。在本说明书中,“传输”是指,进一步向其他的收件方发送或转送信息。
46.根据本实施方式,通过根据传输的必要程度而对是否实施事件信息的传输进行判断,从而能够减少对于传输目标车辆的驾驶员而言不需要的信息的传输。
47.通过减少不需要的事件信息的传输而减少使驾驶员感到厌烦或危险的机会,从而能够提高行驶行驶中的安全性。而且,通过减少传输的次数,从而防止了由传输所导致的信息流量的增加,进而能够抑制通信延迟的发生。
48.参照图2,对本实施方式所涉及的通信装置10的结构进行说明。
49.通信装置10具备控制部11、存储部12、通信部13、输入部14、输出部15和定位部16。
50.控制部11包括至少一个处理器、至少一个专用电路、或它们的组合。处理器为cpu或gpu等通用处理器、或者对于特定的处理而特殊化了的专用处理器。“cpu”为central processing unit(中央处理单元)的缩写。“gpu”为graphics processing unit(图形处理单元)的缩写。专用电路例如为fpga或asic。“fpga”为field
‑
programmable gate array(现场可编程门阵列)的缩写。“asic”为application specific integrated circuit(特定用途集成电路)的缩写。控制部11在对通信装置10的各部进行控制的同时,执行与通信装置10的动作相关的处理。
51.存储部12包括至少一个半导体存储器、至少一个磁存储器、至少一个光存储器、或者这些存储器中的至少两种的组合。半导体存储器例如为ram或rom。“ram”为random access memory(随机存取存储器)的缩写。“rom”为read only memory(只读存储器)的缩写。ram例如为sram或dram。“sram”为static random access memory(静态随机存取存储器)的缩写。“dram”为dynamic random access memory(动态随机存取存储器)的缩写。rom例如为eeprom。“eeprom”为electrically erasable programmable read only memory(电可擦可编程只读存储器)的缩写。存储部12例如作为主存储装置、辅助存储装置或闪存而发挥功能。在存储部12中,存储有在通信装置10的动作中所使用的信息、和通过通信装置10的动作而获得的信息。
52.通信部13包括至少一个通信用接口。通信用接口例如为由无定向性天线以及无线通信电路等而构成的无线通信接口。通信部13接收在通信装置10的工作中所使用的信息,并且发送通过通信装置10的动作而获得的信息。
53.输入部14包括至少一个输入用接口。输入用接口例如为物理按键、静电电容按键、测点设备、与显示器一体设置的触摸屏或话筒。输入部14受理对在通信装置10的动作中所使用的信息进行输入的操作。输入部14也可以作为外部的输入设备而与通信装置10连接,以代替被设置在通信装置10中的结构。作为连接方式,例如能够使用usb、hdmi(注册商标)、或bluetooth(注册商标)等任意的方式。“usb”为universal serial bus(通用串行总线)的缩写。“hdmi(注册商标)”为high
‑
definition multimedia interface(高清晰度多媒体接口)的缩写。
54.输出部15包括至少一个输出用接口。输出用接口例如为显示器或扬声器。显示器例如为lcd或有机el显示器。“lcd”为liquid crystal display(液晶显示器)的缩写。“el”为electro luminescence(电致发光)的缩写。输出部15输出通过通信装置10的动作而获得的信息。输出部15作为外部的输出设备而与通信装置10连接,以代替被设置在通信装置10
中的结构。作为连接方式,例如能够采用usb、hdmi(注册商标)、或bluetooth(注册商标)等任意的方式。
55.定位部16包括至少一个gnss接收器。“gnss”为global navigation satellite system(全球导航卫星系统)的缩写。gnss例如为gps、qzss、glonass或galileo。“gps”为global positioning system(全球定位系统)的缩写。“qzss”为quasi
‑
zenith satellite system(准天顶卫星系统)的缩写。qzss的卫星被称为准天顶卫星。“glonass”为global navigation satellite system(全球导航卫星系统)的缩写。定位部16对通信装置10的位置进行测定。
56.通信装置10的功能通过利用相当于控制部11的处理器来执行本实施方式所涉及的通信程序从而被实现。即,通信装置10的功能通过软件而被实现。通信程序通过使计算机执行通信装置10的动作,从而使计算机作为通信装置10来发挥功能。即,计算机通过按照通信程序来执行通信装置10的动作,从而作为通信装置10来发挥功能。
57.程序能够预先存储在非临时性的计算机可读介质中。非临时性的计算机可读介质例如为磁记录装置、光盘、磁光记录介质或rom。程序的流通例如通过销售、转让、出借存储有程序的dvd或cd
‑
rom等可移动型记录介质来实施。“dvd”为digital versatile disc(数字多功能光盘)的缩写。“cd
‑
rom”为compact disc read only memory(光盘只读存储器)的缩写。也可以通过预先将程序存储在服务器的储存器中,并从服务器向其他的计算机传输程序,从而使程序流通。也可以将程序作为程序产品来提供。
58.计算机例如临时将被存储于可移动型记录介质中的程序或从服务器被传输的程序储存在主存储装置中。然后,计算机通过处理器读取被储存于主存储装置中的程序,并利用处理器来执行按照读取到的程序的处理。计算机也可以从可移动型记录介质直接读取程序,并执行依照程序的处理。计算机也可以在每次从服务器向计算机传输程序时,逐步执行依照接收到的程序的处理。也可以不实施从服务器向计算机的程序的传输,而通过仅利用执行指示以及结果取得来实现功能的所谓的asp型的服务来执行处理。“asp”为application service provider(应用服务提供商)的缩写。在程序中,包括供由电子计算机所实施的处理来使用的信息且以程序为基准的内容。例如,虽然不是针对计算机的直接的指令,但具有对计算机的处理进行规定的性质的数据相当于“以程序为基准的内容”。
59.通信装置10的一部分或全部功能也可以通过相当于控制部11的专用电路来实现。即,通信装置10的一部分或全部的功能也可以通过硬件来实现。
60.参照图3,对本实施方式所涉及的通信装置10的安装例进行说明。
61.在图3中,本实施方式所涉及的通信装置10的控制部11以及存储部12作为系统ecu110而构成。“ecu”为、electronic control unit(电子控制单元)的缩写。通信装置10的通信部13作为v2x通信终端t1而被构成。v2x为vehicle
‑
to
‑
everything(车与外界的信息交换)的缩写。v2x通信为车车间(v2v)通信和路车间(v2i)通信的总称。“v2v”为vehicle
‑
to
‑
vehicle(车
‑
车)的缩写。“v2i”为vehicle
‑
to
‑
infrastructure(车
‑
基础设施)的缩写。在v2x通信中所使用的通信方式例如为dsrc或蜂窝v2x。“dsrc”为dedicated short range communications(专用短距离通信)的缩写。通信装置10的定位部16作为gps接收器而构成。
62.图3中的系统ecu110具有事件信息接收与解析功能f1、周边车辆状况判断功能f2、周边车辆行驶车道判断功能f3、周边车辆方位判断功能f4、周边车辆距离判断功能f5、周边
车辆车速判断功能f6、周边车辆台数判断功能f7、事件信息传输可否判断功能f8、以及事件信息传输功能f9。系统ecu110的各个功能既可以作为相互独立的模块而构成,也可以作为与其他的一个以上的功能整合到一起的模块而构成。
63.在系统ecu110的事件信息接收与解析功能f1中,利用了从v2x通信终端t1被传输的事件信息。从v2x通信终端t1被传输的事件信息例如为,表示事件内容、事件发生位置、或者事件发生车道的信息。在系统ecu110的周边车辆状况判断功能f2中,利用了地图信息60、内部信息50以及外部信息40。在地图信息60中,例如包括十字路口位置坐标等周边环境信息。地图信息60既可以被存储在相当于本实施方式所涉及的通信装置10的存储部12的系统ecu110的存储器等中,或者,也可以存储在被搭载于第一车辆vh1上的导航装置等中的数据库中。在内部信息50中,例如包括车速信息、转向角信息以及作为前后的重力加速度信息的前后g信息等。内部信息50例如也可以为从can取得的信号信息。“can”为controller area network(控制器局域网)的缩写。在内部信息50中,也可以进一步包含由gps接收器所取得的gps信息。在外部信息40中,例如包含表示第三车辆vh3的车速的信息以及相对位置信息等。在外部信息40中,也可以包含表示第三车辆vh3的台数的信息以及行驶车道。外部信息40例如由自主传感器所取得。自主传感器例如为摄像机或雷达。
64.由于本实施方式所涉及的通信装置20以及通信装置30的结构以及功能与通信装置10的结构以及功能相同,因此省略说明。
65.在图3中,本实施方式所涉及的通信装置20的通信部作为v2x通信终端t2而构成。同样地,通信装置30的通信部作为v2x通信终端t3而构成。
66.参照图4,对图3的示例中的信息的流程进行说明。
67.外部传感器400为实施立体物的位置和速度的检测的传感器。外部传感器400例如为前方摄像机或后方摄像机等车载摄像机、lidar、毫米波雷达、激光雷达、或超声波传感器。“lidar”为light detection and ranging(光检测和测距)的缩写。外部传感器400对第一车辆vh1的周边状况进行计测。通过外部传感器400而对例如周边车辆存在数量以及周边车辆位置进行检测。外部传感器400相当于图3的示例中的自主传感器。在周边状况的计测中,例如也可以利用摄像机或雷达等自主传感器信息、或者上一个周期的车车间通信信息等。
68.内部传感器500为实施如下信息的检测的传感器,所述信息为,表示第一车辆vh1的车速、转向、或产生减速度等第一车辆vh1的运行状况以及驾驶员操作的信息。内部传感器500例如为车速传感器、转向传感器、加速度传感器、摄像机或雷达。内部传感器500取得上述的内部信息50和第一车辆vh1的位置信息以及姿态信息。内部传感器500相当于与图3的示例中的can连接的各种传感器、以及gps接收器。
69.v2x通信终端t1以及v2x通信终端t2实施事件信息的接收以及传输。v2x通信终端t1接收从v2x通信终端t2被发送或传输的事件信息。
70.系统ecu110将由内部传感器500所取得的信息与通过外部传感器400而被检测出的信息进行整合,从而对周边车辆状况进行识别。系统ecu110以传感器信息以及通信取得信息为基础而对可否传输信息进行判断。传感器信息是指,通过外部传感器400以及内部传感器500而被取得的信息。通信取得信息是指,从v2x通信终端t2被发送的事件信息。即,系统ecu110基于以外部传感器400的信息以及内部传感器500的信息为基础而识别出的周边
车辆状况、和从通信装置20被发送的事件信息,来对事件信息的传输可否进行判断。在被判断为需要传输的情况下,系统ecu110向v2x通信终端t2实施事件信息的传输指令。v2x通信终端t2接收事件信息的传输指令,而从v2x通信终端t1被传输事件信息。
71.参照图5至图13,对本实施方式所涉及的通信装置10的动作进行说明。该动作相当于本实施方式所涉及的通信方法。
72.本实施方式所涉及的通信装置10的控制部11通过事件信息接收与解析功能f1并经由通信装置10的通信部13来接收事件信息。在图5中,示出了由控制部11的事件信息接收与解析功能f1所实施的处理流程。
73.在步骤s101中,控制部11接收从通信装置20被传输的事件信息。在本实施方式中,作为事件信息而接收了denm。在步骤s102中,控制部11对接收到的事件信息进行解析。事件信息的解析包括根据denm来对例如事件发生位置、事件速度、事件位置的方位以及事件位置的车道编号等进行确定的情况。
74.在步骤s103中,控制部11输出事件信息的解析结果。作为解析结果的示例,可列举出根据事件信息而确定的事件发生位置、事件速度、事件位置的方位以及事件位置的车道编号等。作为事件信息的解析结果而输出的项目根据通信标准的数据字典而被适当地设定。控制部11将解析结果储存在存储部12中。
75.本实施方式所涉及的通信装置10的控制部11在接收到事件信息时,通过周边车辆状况判断功能f2而对第一车辆vh1周边的状况进行识别,从而作为周边车辆状况信息而输出。控制部11将周边车辆状况信息储存在存储部12中。
76.在图6中,示出了由控制部11的周边车辆状况判断功能f2所实施的处理流程。
77.在步骤s201中,控制部11从存储部12读取事件信息的解析结果。在步骤s202中,控制部11对该事件信息为应当向前方传输的信息还是应当向后方传输的信息进行判断。控制部11在通过事件信息而被示出的事件发生位置为第一车辆vh1的行进方向后方的情况下,判断为是应当向前方传输的信息。另一方面,在事件发生位置为第一车辆vh1的行进方向前方的情况下,判断为是应当向后方传输的信息。应当传输事件信息的方向也可以根据由事件信息所示出的事件内容和事件发生位置之间的关系而被预先设定。例如,在事件内容为紧急制动且事件发生位置为第一车辆vh1的行进方向前方的情况下,事件信息的传输方向被设定为后方。在事件内容为应急车辆的接近且事件发生位置为第一车辆vh1的行进方向后方的情况下,事件信息的传输方向被设定为前方。
78.如果在步骤s202中被判断为事件信息是应当向前方传输的信息,则执行步骤s203的处理。在步骤s203中,控制部11对是否能够利用外部传感器400来识别前方进行判断。如果能够进行由外部传感器400所实施的识别,则执行步骤s204的处理。在步骤s204中,控制部11基于由外部传感器400所取得的外部信息40,而对第一车辆vh1的前方的车辆状况进行识别,并对在第一车辆vh1的前方是否存在被识别出的车辆进行判断。在步骤s205中,控制部11针对被识别出的每台车辆而输出表示由外部传感器400得到的计测结果的信息。在表示计测结果的信息中,例如包含表示周边车辆的车速以及相对位置的信息。控制部11将表示由外部传感器400得到的计测结果的信息作为周边车辆状况信息而储存在存储部12中。
79.另一方面,如果在步骤s202中被判断为事件信息是应当向后方传输的信息,则执行步骤s206的处理。在步骤s206中,控制部11对是否能够利用外部传感器400来识别后方进
行判断。如果被判断为能够识别,则执行步骤s207以及步骤s208的处理。步骤s207以及步骤s208中的处理除了是关于第一车辆vh1后方的车辆状况的处理这一点之外,均与步骤s204以及步骤s205中的处理相同。
80.此外,如果在步骤s203或步骤s206中被判断为无法进行由外部传感器400所实施的识别,则在任何情况下均执行步骤s209的处理。在步骤s209中,控制部11在不进行由外部传感器400所实施的识别的条件下结束处理。作为无法进行由外部传感器400所实施的识别的情况的示例,可列举出作为外部传感器400的自主传感器的视场不良或故障。
81.本实施方式所涉及的通信装置10的控制部11基于周边车辆状况信息,且针对被识别出的每台周边车辆而对行驶车道、方位、距离、车速以及台数进行运算,并作为周边车辆信息而输出。控制部11通过周边车辆行驶车道判断功能f3而对行驶车道进行判断。控制部11通过周边车辆方位判断功能f4而对方位进行判断。控制部11通过周边车辆距离判断功能f5而对距离进行判断。控制部11通过周边车辆车速判断功能f6而对车速进行判断。控制部11通过周边车辆台数判断功能f7而对台数进行判断。
82.在图7中,示出了由控制部11的周边车辆行驶车道判断功能f3所实施的处理流程。
83.在步骤s301中,控制部11从存储部12读取周边车辆状况信息。在步骤s302中,控制部11基于周边车辆状况信息而对被识别出的每台车辆的行驶车道进行运算。在步骤s303中,控制部11输出表示运算出的行驶车道的信息。控制部11将表示行驶车道的信息作为行驶车道信息而储存在存储部12中。
84.在图8中,示出了由控制部11的周边车辆方位判断功能f4所实施的处理流程。
85.在步骤s401中,控制部11从存储部12读取周边车辆状况信息。在步骤s402中,控制部11基于周边车辆状况信息而对被识别出的每台车辆的方位进行运算。在步骤s403中,控制部11输出表示运算出的方位的信息。控制部11将表示方位的信息作为方位信息而储存在存储部12中。
86.在图9中,示出了由控制部11的周边车辆距离判断功能f5所实施的处理流程。
87.在步骤s501中,控制部11从存储部12读取周边车辆状况信息。在步骤s502中,控制部11基于周边车辆状况信息,且针对被识别出的每台车辆而对距第一车辆vh1的距离进行运算。在步骤s503中,控制部11输出表示运算出的距离的信息。控制部11将表示距离的信息作为距离信息而存储在存储部12中。
88.在图10中,示出了由控制部11的周边车辆车速判断功能f6所实施的处理流程。
89.在步骤s601中,控制部11从存储部12读取周边车辆状况信息。在步骤s602中,控制部11基于周边车辆状况信息而对被识别出的每台车辆的车速进行运算。在步骤s603中,控制部11输出表示运算出的车速的信息。控制部11将表示车速的信息作为车速信息而储存在存储部12中。
90.在图11中,示出了由控制部11的周边车辆台数判断功能f7所实施的处理流程。
91.在步骤s701中,控制部11从存储部12读取周边车辆状况信息。在步骤s702中,控制部11基于周边车辆状况信息而对被识别出的车辆的台数进行运算。在步骤s703中,控制部11输出表示运算出的台数的信息。控制部11将表示台数的信息作为台数信息而储存在存储部12中。
92.本实施方式所涉及的通信装置10的控制部11以事件信息的解析结果以及周边车
辆信息为基础而对事件信息的传输可否进行判断。控制部11通过事件信息传输可否判断功能f8而对事件信息的传输可否进行判断。
93.在图12中,示出了由控制部11的事件信息传输可否判断功能f8所实施的处理流程。
94.在步骤s801中,控制部11从存储部12读取事件信息的解析结果。在步骤s802中,控制部11从存储部12读取周边车辆的行驶车道信息、方位信息、距离信息、车速信息以及台数信息以作为周边车辆信息。在步骤s803中,控制部11以事件信息的解析结果以及周边车辆信息为基础而对事件信息的传输的必要程度进行评价。控制部11将事件信息的传输的必要程度的评价作为传输必要程度评价值而计算出。
95.在步骤s804中,控制部11将在步骤s803中所获得的传输必要程度评价值与预先设定的评价阈值进行比较。在传输必要程度评价值在评价阈值以上的情况下,执行步骤s805的处理。在步骤s805中,控制部11判断为使通信部13实施传输,并将该判断结果作为事件信息传输判断结果而储存在存储部12中。另一方面,在传输必要程度评价值不在评价阈值以上的情况下,执行步骤s806的处理。控制部11判断为不使通信部13实施传输,并将该判断结果作为事件信息传输判断结果而储存在存储部12中。
96.本实施方式所涉及的通信装置10的控制部11基于事件信息传输判断结果,而对是否使通信部13实施事件信息的发送进行指示。该指示通过控制部11的事件信息传输功能f9来实施。
97.在图13中,示出了由控制部11的事件信息传输功能f9所实施的处理流程。
98.在步骤s901中,控制部11从存储部12读取事件信息传输判断结果。在步骤s902中判断结果为实施传输的判断的情况下,执行步骤s903的处理。在步骤s903中,控制部11向通信部13指示事件信息传输的实施。即,在被判断为需要传输的情况下,控制部11向通信部13指令信息传输,事件信息从通信部13被传输。另一方面,在步骤s902中判断结果为不实施传输的判断的情况下,执行步骤s904的处理。在步骤s904中,控制部11不向通信部13指示事件信息传输的实施。即,控制部11不向通信部13指令信息传输实施,从而事件信息未从通信部13被传输。
99.根据以上内容,在本实施方式中,被搭载于第一车辆vh1上的通信装置10的通信部13与被搭载于第一车辆vh1以外的车辆上的通信装置进行无线通信,当通过通信部13而接收到从被搭载于与第一车辆vh1不同的第二车辆vh2上的通信装置20所传输的、表示事件的发生的事件信息时,通信装置10的控制部11对与第一车辆vh1以及第二车辆vh2不同的第三车辆vh3的状况进行判断,并基于判断的结果而对是否使通信部13实施事件信息向被搭载于第三车辆vh3上的通信装置30的传输进行判断。
100.根据本实施方式,能够减少对于传输目标车辆的驾驶员而言不需要的信息的传输。根据本实施方式,能够在适当的范围内传输所需的信息,并能够消除交通拥堵与车辆控制装置的负荷增加的课题。
101.参照图14至图18,对本实施方式所涉及的通信装置10的具体的示例进行说明。这些具体的示例并非用于对本公开的示例进行限定,而是用于帮助理解本实施方式的示例。在图14至图18的示例中,为了便于说明,从而将第一阈值设为x[m],将第二阈值设为y[m],将第三阈值设为z[km/h],以及将评价阈值设为5[分]。
[0102]
在图14中,示出了由本实施方式所涉及的通信装置10实施的传输必要程度评价值计算方法的一个示例。
[0103]
在本示例中,事件为紧急制动。在非专利文献1中,提供了rhs应用的规格,其中,定义了紧急电子制动灯的用例。“rhs”为road hazard signalling(道路危险信号)的缩写。
[0104]
在本示例中,作为事件信息的紧急制动工作信息从紧急制动实施车辆被发送至第二车辆vh2的通信装置20。第二车辆vh2的通信装置20接收紧急制动工作信息,并将接收到的紧急制动工作信息作为事件信息而传输至第一车辆vh1的通信装置10。
[0105]
在通过事件信息所包含的信息而示出的事件发生位置为第一车辆vh1的行进方向前方的情况下,通信装置10的控制部11将第一车辆vh1的行进方向后方的车辆识别为第三车辆vh3。具体而言,由于紧急制动的事件发生在第一车辆vh1的行进方向前方,因此,控制部11将第一车辆vh1的行进方向后方的车辆识别为第三车辆vh3。在本示例中,第一车辆vh1的通信装置10利用后方摄像机等的自主传感器而确认后方的状况,并且控制部11将第一车辆vh1的后方的车辆识别为第三车辆vh3。在本示例中,被识别出的第三车辆vh3行驶在与事件发生车道相同的车道上。
[0106]
控制部11对第三车辆vh3的状况进行判断。
[0107]
在由控制部11实施的第三车辆vh3的状况的判断中,包括对从第一车辆vh1起至第三车辆vh3为止的第一距离是否小于第一阈值进行判断的处理。在本示例中,由于第三车辆vh3存在于第一车辆vh1后方小于x[m]的范围内,因此,控制部11判断为从第一车辆vh1起至第三车辆vh3为止的第一距离小于第一阈值。
[0108]
关于车速、行驶车道以及从事件的发生位置起至第三车辆vh3为止的第二距离,控制部11以如下方式而对被判断为第一距离小于第一阈值的第三车辆vh3的状况进行判断。
[0109]
在由控制部11所实施的第三车辆vh3的状况的判断中,包含对第三车辆vh3的车速是否在第三阈值以上进行判断的处理。在本示例中,由于第三车辆vh3的车速在z[km/h]以上,因此,控制部11判断为第三车辆vh3的车速在第三阈值以上。控制部11基于判断的结果而对传输的必要程度进行评价,并根据必要程度来对是否使通信部13实施传输进行判断。在事件发生位置为第一车辆vh1的行进方向前方的情况下,控制部11在判断为第一车辆vh1的行进方向后方的第三车辆vh3的车速在第三阈值以上的情况下,与判断为第三车辆vh3的车速不在第三阈值以上的情况相比而将传输的必要程度评价得较高。在本示例中,由于事件发生位置为第一车辆vh1的行进方向前方,且被判断为该第一车辆vh1的行进方向后方的第三车辆vh3的车速在第三阈值以上,因此,控制部11加上3[分]。
[0110]
在由控制部11实施的第三车辆vh3的状况的判断中,包括对通过事件信息所包含的信息而示出的发生了事件的车道即事件车道、和第三车辆vh3所行驶的车道即行驶车道进行比较的处理。在本示例中,控制部11对第三车辆vh3的行驶车道和事件车道进行比较。控制部11基于判断的结果而对传输的必要程度进行评价,并根据必要程度而对是否使通信部13实施传输进行判断。作为对事件车道和行驶车道进行了比较的结果,控制部11在判断为事件车道和行驶车道相同的情况下,与判断为事件车道与行驶车道不同的情况相比而将必要程度评价得较高。在本示例中,控制部11作为对第三车辆vh3的行驶车道和事件车道进行了比较的结果而判断为相同,从而加上3[分]。
[0111]
在由控制部11所实施的第三车辆vh3的状况的判断中,包含对从事件的发生位置
起至第三车辆vh3为止的第二距离是否小于第二阈值进行判断的处理。在本示例中,由于从事件发生位置起至第三车辆vh3为止的距离小于y[m],因此,控制部11判断为从事件的发生位置起至第三车辆vh3为止的第二距离小于第二阈值。在事件的发生位置为第一车辆vh1的行进方向前方的情况下,控制部11将第一车辆vh1的行进方向后方的车辆识别为第三车辆vh3。控制部11基于判断的结果而对传输的必要程度进行评价,并根据必要程度而对是否使通信部13实施传输进行判断。控制部11在判断为从事件的发生位置起至第三车辆vh3为止的第二距离小于第二阈值的情况下,与判断为从事件的发生位置起至第三车辆vh3为止的第二距离不小于第二阈值的情况相比而将传输的必要程度评价得较高。在本示例中,由于事件发生位置为第一车辆vh1的行进方向前方,且判断为从事件的发生位置起至该第一车辆vh1的行进方向后方的第三车辆vh3为止的第二距离小于第二阈值,因此,控制部11加上3[分]。
[0112]
控制部11基于第三车辆vh3的状况的判断的结果而对传输的必要程度进行评价。在本示例中,控制部11通过将关于车速而对第三车辆vh3的状况进行了判断的结果即3[分]、关于行驶车道而对第三车辆vh3的状况进行了判断的结果即3[分]、关于第二距离而对第三车辆vh3的状况进行了判断的结果即3[分]合计在一起,并乘以存在于第一距离小于第一阈值的范围内的车辆的台数即“1”,从而将传输必要程度评价值设为9[分]。由于评价阈值为5[分],因此,控制部11判断为传输必要程度评价值在评价阈值以上。
[0113]
在本示例中,在存在于第一距离小于第一阈值的范围内的车辆具有两台以上的情况下,针对每一台车辆而实施状况的判断,且在对状况进行了判断的结果为具有相同车辆的情况下,通过将每台车辆的判断结果的总计值乘以对状况进行了判断的结果为相同的车辆的台数,从而对传输必要程度评价值进行计算。具体而言,在除了第三车辆vh3之外还存在有一台车辆且对该车辆的状况进行了判断的结果与关于第三车辆vh3而判断出的结果相同的情况下,通过将作为第三车辆vh3的判断结果的总计值的9[分]乘以“2”,从而将传输必要程度评价值设为18[分]。另一方面,在对各台车辆的状况进行了判断的结果不同的情况下,将每台车辆的判断结果的总计值的总和设为传输必要程度评价值。具体而言,在关于另一台的车辆的车速而判断出的结果为3[分]、关于行驶车道而判断出的结果为1[分]、且关于第二距离而判断出的结果为1[分]的情况下,将第三车辆vh3的判断结果的总计值即9[分]和另一台的车辆的判断结果的总计值即5[分]的总和即14[分]设为传输必要程度评价值。
[0114]
控制部11根据必要程度而对是否使通信部13实施传输进行判断。具体而言,在传输必要程度评价值为评价阈值以上的情况下,控制部11判断为使通信部13实施信息的传输。在本示例中,由于被判断为传输必要程度评价值为评价阈值以上,因此,控制部11判断为使通信部13实施信息的传输。
[0115]
即,在本示例中,通过根据第三车辆vh3的车速状况、车道状况以及距离状况而被判断为传输的必要程度为评价阈值以上,从而判断为需要信息的传输,进而实施传输。
[0116]
根据以上内容,在本示例中,适当地实施了事件信息的传输可否判断。
[0117]
在图15中,示出了由本实施方式所涉及的通信装置10实施的传输必要程度评价值计算方法的一个示例。
[0118]
在本示例中,事件为道路施工。道路施工为,在通过非专利文献1而提供的rhs应用
中被定义的用例。
[0119]
在道路施工的用例中,担心由于事件信息的传输而产生不需要的提醒。以下,示出了用于通过本实施方式所涉及的通信装置10而适当地实施传输可否判断并减少不需要的工作的具体的示例。
[0120]
在本示例中,作为事件信息的道路施工信息从基础设施中的通信终端的示例即rsu被发送至第二车辆vh2的通信装置20。“rsu”为roadside unit(路边单元)的缩写。第二车辆vh2的通信装置20接收道路施工信息,并将接收到的道路施工信息作为事件信息而传输至第一车辆vh1的通信装置10。
[0121]
在通过事件信息所包含的信息而示出的事件的发生位置为第一车辆vh1的行进方向前方的情况下,通信装置10的控制部11将第一车辆vh1的行进方向后方的车辆识别为第三车辆vh3。具体而言,由于道路施工的事件发生在第一车辆vh1的行进方向前方,因此,控制部11将第一车辆vh1的行进方向后方的车辆识别为第三车辆vh3。在本示例中,第一车辆vh1的通信装置10利用后方摄像机等的自主传感器而确认后方的状况,控制部11将第一车辆vh1的后方的车辆识别为第三车辆vh3。
[0122]
在本示例中,作为后方车辆的第三车辆vh3行驶在与道路施工事件发生车道不同的车道上,作为距事件发生位置的距离的第二距离也离得足够远。在该情况下,即使实施了传输,驾驶员也有可能无法理解必要性而产生厌烦。
[0123]
控制部11以与图14所示的示例同样的方式而对第三车辆vh3的状况进行判断。
[0124]
在由控制部11实施的第三车辆vh3的状况的判断中,包含对从第一车辆vh1起至第三车辆vh3为止的第一距离是否小于第一阈值进行判断的处理。在本示例中设为,第三车辆vh3存在于第一车辆vh1后方小于x[m]的范围内。控制部11判断为从第一车辆vh1起至第三车辆vh3为止的第一距离小于第一阈值。
[0125]
关于车速、行驶车道、以及从事件的发生位置至第三车辆vh3为止的第二距离,控制部11以如下的方式而对被判断为第一距离小于第一阈值的第三车辆vh3的状况进行判断。
[0126]
在由控制部11所实施的第三车辆vh3的状况的判断中,包括对事件车道、和作为第三车辆vh3行驶的车道的行驶车道进行比较的处理。在本示例中,控制部11对第三车辆vh3的行驶车道和事件车道进行比较。作为对事件车道和行驶车道进行了比较的结果,控制部11在判断为事件车道和行驶车道相同的情况下,与判断为事件车道和行驶车道不同的情况相比而将必要程度评价得较高。在本示例中,作为对第三车辆vh3的行驶车道和事件车道进行了比较的结果,控制部11判断为事件车道和第三车辆vh3的行驶车道不同、即不相同,从而加上0[分]。
[0127]
在由控制部11实施的第三车辆vh3的状况的判断中,包括对从事件的发生位置起至第三车辆vh3为止的第二距离是否小于第二阈值进行判断的处理。在本示例中设为,第二距离在y[m]以上。控制部11判断为第二距离在第二阈值以上。
[0128]
在事件的发生位置为第一车辆vh1的行进方向前方的情况下,控制部11将第一车辆vh1的行进方向后方的车辆识别为第三车辆vh3。控制部11在判断为从事件的发生位置起至第三车辆vh3为止的第二距离小于第二阈值的情况下,与判断为从事件的发生位置起至第三车辆vh3为止的第二距离不小于第二阈值的情况相比而将传输的必要程度评价得较
高。在本示例中,由于事件发生位置为第一车辆vh1的行进方向前方,且判断为从事件的发生位置起至该第一车辆vh1的行进方向后方的第三车辆vh3为止的第二距离在第二阈值以上,因此,控制部11加上0[分]。
[0129]
关于第三车辆vh3的车速,控制部11也以与图14所示的示例同样的方式来进行判断。在本示例中设为,第三车辆vh3的车速在z[km/h]以上。控制部11判断为车速在第三阈值以上,从而加上3[分]。
[0130]
控制部11基于第三车辆vh3的状况的判断的结果而对传输的必要程度进行评价。传输的必要程度的评价以与图14所示的示例同样的方式而被实施。在本示例中,控制部11通过将关于行驶车道而对第三车辆vh3的状况进行了判断的结果即0[分]、关于第二距离而对第三车辆vh3的状况进行了判断的结果即0[分]、关于车速而对第三车辆vh3的状况进行了判断的结果即3[分]总计在一起,并乘以存在于第一距离小于第一阈值的范围内的车辆的台数即“1”,从而将传输必要程度评价值设为3[分]。由于评价阈值为5[分],因此,控制部11判断为传输必要程度评价值小于评价阈值。
[0131]
控制部11根据必要程度而对是否使通信部13实施传输进行判断。具体而言,在传输必要程度评价值小于评价阈值的情况下,控制部11判断为不使通信部13实施信息的传输。在本示例中,由于判断为传输必要程度评价值小于评价阈值,因此,控制部11判断为不使通信部13实施信息的传输。
[0132]
即,在本示例中,由于从事件发生位置起至第三车辆vh3为止具有足够的距离,且行驶车道也不同,因此,传输未被实施。
[0133]
根据以上内容,在本示例中,根据事件发生位置和后方车辆的行驶车道位置错开两个的车道状况、和后方车辆位置与事件发生位置充分错开这样的距离状况,而使得控制部11将信息的传输必要程度评价得较低,并判断为必要程度在评价阈值以下,从而传输未被实施。
[0134]
在本示例中,传输可否判断被适当地实施,从而减少了驾驶员所感到的厌烦。
[0135]
在图16中,示出了由本实施方式所涉及的通信装置10实施的传输必要程度评价值计算方法的一个示例。
[0136]
在本例中,事件为紧急制动。
[0137]
在非专利文献1的紧急制动灯的用例中,担心由于事件信息的传输而产生不需要的提醒工作。以下,示出了通过本实施方式所涉及的通信装置10而适当地实施传输可否判断的两个示例。
[0138]
在图16中,图示了第三车辆vh3以及第三车辆vh3’这两台车辆。以下,关于第三车辆vh3’而对传输信息的情况进行说明。在该情况下,作为仅存在第三车辆vh3’而不存在第三车辆vh3的结构来进行说明。另一方面,关于第三车辆vh3而对未传输信息的情况进行说明。在该情况下,作为仅存在第三车辆vh3而不存在第三车辆vh3’的结构来进行说明。
[0139]
在本例中,作为事件信息的紧急制动工作信息从紧急制动实施车辆被发送至第二车辆vh2的通信装置20。第二车辆vh2的通信装置20接收紧急制动工作信息,并将接收到的紧急制动工作信息作为事件信息而传输至第一车辆vh1的通信装置10。
[0140]
在通过事件信息所包含的信息而示出的事件的发生位置为第一车辆vh1的行进方向前方的情况下,通信装置10的控制部11将第一车辆vh1的行进方向后方的车辆识别为第
三车辆vh3或第三车辆vh3’。具体而言,由于紧急制动的事件发生在第一车辆vh1的行进方向前方,因此,控制部11将第一车辆vh1的行进方向后方的车辆识别为第三车辆vh3或第三车辆vh3’。在本示例中,由于紧急制动的事件发生在第一车辆vh1的行进方向前方,因此,第一车辆vh1的通信装置10利用后方摄像机等的自主传感器而确认后方的状况,控制部11将第一车辆vh1的行进方向后方的车辆识别为第三车辆vh3或第三车辆vh3’。
[0141]
在本示例中,关于实施传输的情况而以第三车辆vh3’为例来进行说明。在图16中,第一车辆vh1的行进方向后方的第三车辆vh3’向与事件发生车道相同的车道移动过来。此外,驾驶员由于正在集中精力进行车道变更操作,因此,当前方发生紧急制动时,有可能反应速度较慢。
[0142]
控制部11以与图14所示的示例同样的方式来对第三车辆vh3’的状况进行判断。
[0143]
在由控制部11实施的第三车辆vh3’的状况的判断中,包括对从第一车辆vh1起至第三车辆vh3’为止的第一距离是否小于第一阈值进行判断的处理。在本示例中设为,第三车辆vh3’存在于第一车辆vh1后方小于x[m]的范围内。控制部11判断为从第一车辆vh1起至第三车辆vh3’为止的第一距离小于第一阈值。
[0144]
关于车速、行驶车道、以及从事件的发生位置起至第三车辆vh3’为止的第二距离,控制部11以如下方式而对被判断为第一距离小于第一阈值的第三车辆vh3’的状况进行判断。
[0145]
在由控制部11实施的第三车辆vh3’的状况的判断中,包括对事件车道、和作为第三车辆vh3’行驶的车道的行驶车道进行比较的处理。在第三车辆vh3’的驾驶员实施了将车道从第一车道变更为与第一车道不同的第二车道的操作的情况下,控制部11将第二车道作为行驶车道而与事件车道进行比较。在本示例中,第三车辆vh3’的驾驶员实施车道变更操作,控制部11将变更目标的车道即中央车道作为第三车辆vh3’的行驶车道而与事件车道进行比较。驾驶员对车道进行变更的操作的检测例如通过由外部传感器400来对第三车辆vh3’的方向指示灯闪烁的情况进行检测从而被实施。
[0146]
作为对事件车道和行驶车道进行了比较的结果,控制部11在判断为事件车道和行驶车道相同的情况下,与判断为事件车道与行驶车道不同的情况相比而将传输的必要程度评价得较高。在本示例中,作为对第三车辆vh3’的车道变更目标的中央车道和事件车道进行了比较的结果,控制部11判断为相同,从而加上3[分]。
[0147]
关于第三车辆vh3’的车速以及第二距离,控制部11也以与图14所示的示例同样的方式而实施判断。在本例中设为,车速在z[km/h]以上,且第二距离在y[m]以上。控制部11判断为车速在第三阈值以上,并加上3[分]。控制部11判断为第二距离在第二阈值以上,从而加上0[分]。
[0148]
控制部11基于第三车辆vh3’的状况的判断的结果而对传输的必要程度进行评价。传输的必要程度的评价以与图14所示的示例同样的方式而被实施。在本示例中,控制部11通过将关于行驶车道而对第三车辆vh3’的状况进行了判断的结果即3[分]、关于车速而对第三车辆vh3’的状况进行了判断的结果即3[分]、关于第二距离而对第三车辆vh3’的状况进行了判断的结果即0[分]总计在一起,并乘以存在于第一距离小于第一阈值的范围内的车辆的台数即“1”,从而将传输必要程度评价值设为6[分]。由于评价阈值为5[分],因此,控制部11判断为传输必要程度评价值在评价阈值以上。
[0149]
控制部11根据必要程度而对是否使通信部13实施传输进行判断。具体而言,在传输必要程度评价值在评价阈值以上的情况下,控制部11判断为使通信部13实施信息的传输。在本示例中,由于判断为传输必要程度评价值在评价阈值以上,因此,控制部11判断为使通信部13实施信息的传输。
[0150]
根据上述的车道状况、驾驶员操作状况,控制部11将信息的传输必要程度评价为阈值以上,从而实施传输。
[0151]
在本示例中,关于未实施传输的情况而以第三车辆vh3为例来进行说明。在图16中,第一车辆vh1的行进方向后方的第三车辆vh3行驶在与事件发生车道不同的车道上,且距事件发生位置的距离也离得足够远。在该情况下,即使实施了传输,驾驶员也有可能无法理解必要性而产生厌烦。此外,设为除了第三车辆vh3以外在后方不存在车辆,也不存在其他有可能需要传输的车辆。
[0152]
控制部11以与图14所示的示例同样的方式来对第三车辆vh3的状况进行判断。
[0153]
在由控制部11实施的第三车辆vh3的状况的判断中,包括对从第一车辆vh1起至第三车辆vh3为止的第一距离是否小于第一阈值进行判断的处理。在本示例中设为,第三车辆vh3存在于第一车辆vh1后方小于x[m]的范围内。控制部11判断为,从第一车辆vh1起至第三车辆vh3为止的第一距离小于第一阈值。
[0154]
关于车速、行驶车道、以及从事件的发生位置起至第三车辆vh3为止的第二距离,控制部11以如下方式而对被判断为第一距离小于第一阈值的第三车辆vh3的状况进行判断。
[0155]
在由控制部11实施的第三车辆vh3的状况的判断中,包括对事件车道、和作为第三车辆vh3行驶的车道的行驶车道进行比较的处理。在本示例中,控制部11对第三车辆vh3的行驶车道和事件车道进行比较。作为对事件车道和行驶车道进行了比较的结果,控制部11在判断为事件车道和行驶车道相同的情况下,与判断为事件车道与行驶车道不同的情况相比而将必要程度评价得较高。在本示例中,作为对第三车辆vh3的行驶车道和事件车道进行了比较的结果,控制部11判断为事件车道和第三车辆vh3的行驶车道不同、即不相同,从而加上0[分]。
[0156]
在由控制部11实施的第三车辆vh3的状况的判断中,包括对从事件的发生位置起至第三车辆vh3为止的第二距离是否小于第二阈值进行判断的处理。在本示例中设为,第二距离为y[m]以上。控制部11判断为第二距离为第二阈值以上。
[0157]
在事件的发生位置为第一车辆vh1的行进方向前方的情况下,控制部11将第一车辆vh1的行进方向后方的车辆识别为第三车辆vh3。控制部11在判断为从事件的发生位置起至第三车辆vh3为止的第二距离小于第二阈值的情况下,与判断为从事件的发生位置起至第三车辆vh3为止的第二距离不小于第二阈值的情况相比而将传输的必要程度评价得较高。在本例中,由于事件发生位置为第一车辆vh1的行进方向前方,且被判断为从事件的发生位置起至该第一车辆vh1的行进方向后方的第三车辆vh3为止的第二距离在第二阈值以上,因此,控制部11加上0[分]。
[0158]
关于第三车辆vh3的车速,控制部11以与图14所示的示例同样的方式来进行判断。在本示例中设为,第三车辆vh3的车速在z[km/h]以上。控制部11判断为车速在第三阈值以上,从而加上3[分]。
[0159]
控制部11基于第三车辆vh3的状况的判断的结果而对传输的必要程度进行评价。传输的必要程度的评价以与图14所示的示例同样的方式而被实施。在本示例中,控制部11通过将关于行驶车道而对第三车辆vh3的状况进行了判断的结果即0[分]、关于车速而对第三车辆vh3的状况进行了判断的结果即3[分]、关于第二距离而对第三车辆vh3的状况进行了判断的结果即0[分]总计在一起,并乘以存在于第一距离小于第一阈值的范围内的车辆的台数即“1”,从而将传输必要程度评价值设为3[分]。由于评价阈值为5[分],因此,控制部11判断为传输必要程度评价值小于评价阈值。
[0160]
控制部11根据必要程度而对是否使通信部13实施传输进行判断。具体而言,在传输必要程度评价值小于评价阈值的情况下,控制部11判断为不使通信部13实施信息的传输。在本示例中,由于被判断为传输必要程度评价值小于评价阈值,因此,控制部11判断为不使通信部13实施信息的传输。
[0161]
即,在本示例中,由于到事件发生位置为止具有足够的距离,车道也不同,因此,传输未被实施,从而减少了驾驶员所感到的厌烦。
[0162]
在图17中,示出了由本实施方式所涉及的通信装置10实施的传输必要程度评价值计算方法的一个示例。
[0163]
在本示例中,事件为应急车辆的接近。应急车辆的接近为,在通过非专利文献1而提供的rhs应用中被定义的用例。
[0164]
在应急车辆的接近的用例中,担心会由于事件信息的传输而产生不需要的提醒工作。以下,示出了用于通过本实施方式所涉及的通信装置10而适当地实施传输可否判断并减少不需要的工作的具体的示例。
[0165]
在本示例中,作为事件信息的应急车辆接近信息从应急车辆被发送至第二车辆vh2的通信装置20。第二车辆vh2的通信装置20接收应急车辆接近信息,并将接收到的应急车辆接近信息传输至第一车辆vh1的通信装置10。
[0166]
在通过事件信息所包含的信息而示出的事件的发生位置为第一车辆vh1的行进方向后方的情况下,通信装置10的控制部11将第一车辆vh1的行进方向前方的车辆识别为第三车辆vh3。具体而言,由于应急车辆接近的事件发生在第一车辆vh1的行进方向后方,因此,控制部11将第一车辆vh1的行进方向前方的车辆识别为第三车辆vh3。在本示例中,第一车辆vh1的通信装置10利用前方摄像机等的自主传感器而确认前方的状况,控制部11将第一车辆vh1的前方的车辆识别为第三车辆vh3。在本示例中设为,第三车辆vh3的车速在z[km/h]以上。
[0167]
控制部11以与图14所示的示例同样的方式来对第三车辆vh3的状况进行判断。
[0168]
在由控制部11实施的第三车辆vh3的状况的判断中,包括对从第一车辆vh1起至第三车辆vh3为止的第一距离是否小于第一阈值进行判断的情况。在本示例中设为,第三车辆vh3存在于第一车辆vh1前方小于x[m]的范围内。控制部11判断为从第一车辆vh1起至第三车辆vh3为止的第一距离小于第一阈值。
[0169]
关于车速、行驶车道、以及从事件的发生位置至第三车辆vh3为止的第二距离,控制部11以如下的方式而对被判断为第一距离小于第一阈值的第三车辆vh3的状况进行判断。
[0170]
在由控制部11实施的第三车辆vh3的状况的判断中,包括对第三车辆vh3的车速是
否在第三阈值以上进行判断的处理。在本示例中,由于第三车辆vh3的车速在z[km/h]以上,因此,控制部11判断为第三车辆vh3的车速在第三阈值以上。在事件发生位置为第一车辆vh1的行进方向后方的情况下,控制部11在判断为第一车辆vh1的行进方向前方的第三车辆vh3的车速在第三阈值以上的情况下,与判断为第三车辆vh3的车速不在第三阈值以上的情况相比而将传输的必要程度评价得较低。在本示例中,由于事件发生位置为第一车辆vh1的行进方向后方,且被判断为该第一车辆vh1的行进方向前方的第三车辆vh3的车速在第三阈值以上,因此,控制部11加上0[分]。
[0171]
关于第三车辆vh3的行驶车道以及第二距离,控制部11也以与图14所示的示例同样的方式来进行判断。在本示例中,第三车辆vh3行驶在与事件车道不同的车道上。此外,设为第二距离小于y[m]。控制部11判断为行驶车道与事件车道不同,从而加上0[分]。控制部11判断为第二距离小于第二阈值,从而加上3[分]。
[0172]
控制部11基于第三车辆vh3的状况的判断的结果而对传输的必要程度进行评价。传输的必要程度的评价以与图14所示的示例同样的方式而被实施。在本示例中,控制部11通过将关于行驶车道而对第三车辆vh3的状况进行了判断的结果即0[分]、关于车速而对第三车辆vh3的状况进行了判断的结果即0[分]、关于第二距离而对第三车辆vh3的状况进行了判断的结果即3[分]总计在一起,并乘以存在于第一距离小于第一阈值的范围内的车辆的台数即“1”,从而将传输必要程度评价值设为3[分]。由于评价阈值为5[分],因此,控制部11判断为传输必要程度评价值小于评价阈值。
[0173]
控制部11根据必要程度而对是否使通信部13实施传输进行判断。具体而言,在传输必要程度评价值小于评价阈值的情况下,控制部11判断为不使通信部13实施信息的传输。在本示例中,由于判断为传输必要程度评价值小于评价阈值,因此,控制部11判断为不使通信部13实施信息的传输。
[0174]
即,在本示例中,根据事件发生位置和前方车辆的行驶车道位置不同这样的车道状况、和第三车辆vh3的车速为第三阈值以上这样的车速状况,控制部11将信息的传输的必要程度评价得较低,并判断为必要程度在评价阈值以下,从而传输未被实施。
[0175]
根据以上内容,在本示例中,适当地实施了传输可否判断,并减少了驾驶员感到的厌烦。
[0176]
在图18中,示出了由本实施方式所涉及的通信装置10实施的传输必要程度评价值计算方法的一个示例。
[0177]
在本示例中,事件为紧急制动。
[0178]
作为事件信息的紧急制动工作信息从紧急制动实施车辆被发送至第二车辆vh2的通信装置20。第二车辆vh2的通信装置20接收紧急制动工作信息,并将接收到的紧急制动工作信息作为事件信息而传输至第一车辆vh1的通信装置10。
[0179]
在通过事件信息所包含的信息而示出的事件的发生位置为第一车辆vh1的行进方向前方的情况下,通信装置10的控制部11将第一车辆vh1的行进方向后方的车辆识别为第三车辆vh3。具体而言,由于紧急制动的事件发生在第一车辆vh1的行进方向前方,因此,控制部11将第一车辆vh1的行进方向后方的车辆识别为第三车辆vh3。在本示例中,第一车辆vh1的通信装置10利用后方摄像机等的自主传感器而确认后方的状况,控制部11将第一车辆vh1的行进方向后方的车辆识别为第三车辆vh3。
[0180]
控制部11以与图14所示的示例同样的方式来对第三车辆vh3的状况进行判断。
[0181]
在由控制部11实施的第三车辆vh3的状况的判断中,包括对从第一车辆vh1起至第三车辆vh3为止的第一距离是否小于第一阈值进行判断的处理。在本示例中,由于在第一车辆vh1后方小于x[m]的范围内不存在车辆,因此,控制部11判断为从第一车辆vh1起至第三车辆vh3为止的第一距离在第一阈值以上。控制部11在判断为从第一车辆vh1起至第三车辆vh3为止的第一距离在第一阈值以上的情况下,与判断为从第一车辆vh1起至第三车辆vh3为止的第一距离小于第一阈值的情况相比而将传输的必要程度评价得较低。在本示例中,由于被判断为第一距离在第一阈值以上,因此,控制部11加上0[分]。
[0182]
控制部11基于第三车辆vh3的状况的判断的结果而对传输的必要程度进行评价。在本示例中,由于存在于第一距离小于第一阈值的范围内的车辆的台数为0台,因此,不存在应当通过控制部11来判断状况的第三车辆vh3。由于存在于第一距离小于第一阈值的范围内的车辆的台数为0台,因此,通过乘以“0”而将传输必要程度评价值设为0[分]。由于评价阈值为5[分],因此,控制部11判断为传输必要程度评价值小于评价阈值。
[0183]
控制部11根据必要程度而对是否使通信部13实施传输进行判断。具体而言,在传输必要程度评价值小于评价阈值的情况下,控制部11判断为不使通信部13实施信息的传输。在本示例中,由于被判断为传输必要程度评价值小于评价阈值,因此,控制部11判断为不使通信部13实施信息的传输。
[0184]
即,在本示例中,根据在第一车辆vh1后方小于x[m]的范围内不存在车辆这样的第三车辆vh3的状况,而判断为传输的必要程度小于评价阈值,从而传输未被实施。
[0185]
根据以上内容,在本示例中,适当地实施了事件信息的传输可否判断。
[0186]
另外,虽然在图14至图18的示例中,将第一阈值设为x[m],将第二阈值设为y[m],将第三阈值设为z[km/h],以及将评价阈值设为5[分],但这些阈值例如也可以针对事件的每个类别而各不相同。
[0187]
以上,根据本实施方式,控制部11在接收到紧急制动、道路施工、或应急车辆接近等事件信息时,考虑到计测出的周边状况而适当地实施事件信息的传输可否判断,且在判断为接收到的事件信息的传输会产生对传输目标车辆的驾驶员造成的厌烦或危险的情况下,通过不实施传输,从而能够减少对于传输目标车辆的驾驶员而言不需要的信息的传输。根据本实施方式,通过使用从自主传感器获得的信息来适当地对传输必要程度进行判断,从而能够实施有效的信息传输,进而实现了更加安全的车载通信功能。
[0188]
本公开并非被限定于上述的实施方式以及实施例的内容。例如,既可以将框图中所记载的多个框整合在一起,或者,也可以对一个框进行分割。也可以代替根据描述并按照时间序列来执行流程图所记载的多个步骤,而根据执行各个步骤的装置的处理能力、或者根据需要来并列地或者按照不同的顺序来执行。此外,能够实施不脱离本公开的主旨的范围内的变更。
[0189]
符号说明
[0190]
1 通信系统;
[0191]
10、20、30 通信装置;
[0192]
11 控制部;
[0193]
12 存储部;
[0194]
13 通信部;
[0195]
14 输入部;
[0196]
15 输出部;
[0197]
16 定位部;
[0198]
40 外部信息;
[0199]
50 内部信息;
[0200]
60 地图信息;
[0201]
110 系统ecu;
[0202]
400 外部传感器;
[0203]
500 内部传感器;
[0204]
f1 事件信息接收与解析功能;
[0205]
f2 周边车辆状况判断功能;
[0206]
f3 周边车辆行驶车道判断功能;
[0207]
f4 周边车辆方位判断功能;
[0208]
f5 周边车辆距离判断功能;
[0209]
f6 周边车辆车速判断功能;
[0210]
f7 周边车辆台数判断功能;
[0211]
f8 事件信息传输可否判断功能;
[0212]
f9 事件信息传输功能;
[0213]
t1、t2、t3 v2x通信终端;
[0214]
vh1 第一车辆;
[0215]
vh2 第二车辆;
[0216]
vh3、vh3
’ꢀ
第三车辆。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

