1.本发明涉及公交线路数据处理与分析领域,具体涉及一种公交骨干线路抓取方法。
背景技术:
2.公交车骨干线路抓取是公交系统智能化和信息化的关键技术,受到国内外研究者的广泛关注但是因为种种客观原因,一直无法找到非常有效的方法来得到比较精确的结果。目前找到影响公交骨干线路准确性的因素有:(1)公交车原始gps存在异常。包含车辆速度异常,车辆的gps不上报,车辆车载机损坏导致车辆gps按照一定的频率漂移到固定的一点。(2)车辆gps切分困难。由于报站存在一定误差,使得仅仅依赖报站无法切分出干净的上行轨迹和下行轨迹。(3)由于没有路网信息,很难搜索出一条符合道路逻辑的轨迹。
3.由于原始gps本身存在误差以及站点gps误差,因此如何从充满噪音的gps中提取代表gps成为重中之重。
4.中国公开专利号cn111210612a,发明名称基于公交gps数据与站点信息提取公交线路轨迹的方法,公开了一种基于公交gps数据与站点信息提取公交线路轨迹的方法,包括如下步骤:获取某市所有公交线路的站点数据,对站点数据进行预处理;对站点数据进行归一化处理,对所有站点的站点经纬度进行分析,若站点的站点经纬度存在2个以上,则采用改进的kmeans聚类算法对站点经纬度进行聚类,得到新的站点经纬度。本发明具有结合站点信息与公交gps历史数据获得的公交线路轨迹,有效避免了获得有明显偏移走向的公交线路轨迹的特点。
5.通过搜索代表线路,并且选择代表线路上的每一个gps点周围200米的所有其它线路gps点的质心来作为骨干线路gps点。但是这种方法计算量偏大,并且没有考虑到gps点之间的几何拓扑关系。这会造成在一些线路上存在毛刺。或者由于代表线路和实际运行的不一致导致站站之间轨迹存在偏差。
6.中国公开专利号cn109033424a,发明名称一种基于公交车运营轨迹精确提取公交车行驶路径的方法,此发明公开了一种基于公交车运营轨迹精确提取公交车行驶路径的方法,包括下述步骤:首先,通过轨迹过滤算法对已采集某线路的公交车运营轨迹数据进行数据过滤处理;然后,通过多轨迹融合算法将已过滤的轨迹融合为一条轨迹;之后,利用高德地图的抓路服务将已融合的轨迹进行路径偏移校正,初步得到该公交线路的一条路径;最后,通过起终点路径融合算法对已校正的路径进行主副站偏移校正,从而得到该公交线路上一条精准的路径。本方法充分考虑了公交车载机gps信号飘移、定位不精准等诸多因素,展示了如何对公交车运营轨迹数据的过滤、融合以及校正,使提取的公交车行驶路径更具现实性、可靠性和准确性。
7.选择通过计算所有候选轨迹间的hausdorff距离。并且选择到所有候选轨迹hausdorff距离最小的轨迹作为参考轨迹。再通过参考轨迹的轨迹点搜寻邻近的轨迹点集合的质心作为骨干线路。但是由于计算hausdorff距离比较耗时,会影响该方法的计算速
度。同时由于轨迹融合依赖参考轨迹上的gps点,参考轨迹上的gps误差会导致最终融合轨迹的误差。并且邻近参考轨迹的候选质心有大部分会不在路上,这导致了最后的结果输出依赖高德的抓路。
技术实现要素:
8.本发明是针对现有的问题(1)公交车原始gps存在异常,包含车辆速度异常,车辆的gps不上报,车辆车载机损坏导致车辆gps按照一定的频率漂移到固定的一点;(2)车辆gps切分困难,由于报站存在一定误差,使得仅仅依赖报站无法切分出干净的上行轨迹和下行轨迹;(3)由于没有路网信息,很难搜索出一条符合道路逻辑的轨迹;设计了一种基于众源数据的公交骨干线路抓取方法。
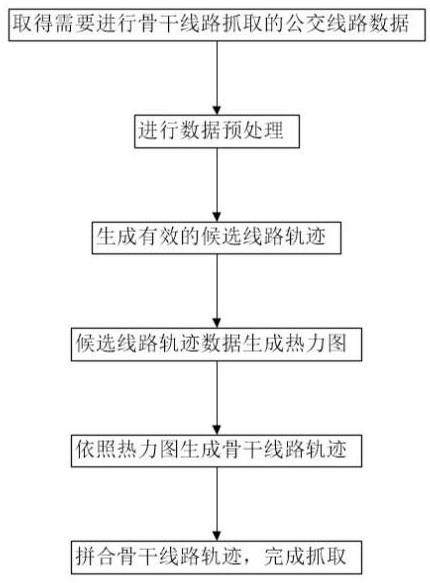
9.一种公交骨干线路抓取方法,包括:步骤一,取得需要进行骨干线路抓取的公交线路数据,并进行数据预处理;步骤二,从预处理结束后的数据中生成有效的候选线路轨迹;步骤三,以步骤二的候选线路轨迹数据生成热力图,依照热力图生成骨干线路轨迹;步骤四,拼合骨干线路轨迹,完成抓取。
10.作为优选,所述的步骤一在数据预处理时,包括以下子步骤:子步骤一一,设定时间t,以t为时间范围取得一条公交线路的gps轨迹采集的结果数据;子步骤一二,取得此条公交线路现有的站点数据;子步骤一三,将候选轨迹gps集和静态站点位置集转换为墨卡托坐标系;子步骤一四,计算候选gps和静态站点间的距离,确定实际的报站顺序,也就是行车的gps轨迹;子步骤一五,对gps轨迹进行有序切割,并剔除数据错误的gps点位。
11.作为优选,所述的步骤二在子步骤一五进行生成候选线路轨迹,然后再返回到子步骤一一进行下一条候选线路轨迹的生成。
12.作为优选,所述的步骤三包括以下子步骤:子步骤三一,从所有候选轨迹里寻找最近的站与站之间的间距作为热力图网格线的单位长度;子步骤三二,生成足够覆盖所有候选线路轨迹的网格,并计算每个点的热力值,作为热力图计算的基础;子步骤三三,以候选轨迹中起点重叠数量最高的点作为热力图计算的起点,同理得到终点;子步骤三四,选择与当前网格点最近的5个未被走过的网格点作为下一个时刻的潜在网格点,如果潜在网格点满足这个网格点存在热力值,并且潜在网格点离终点距离小于当前网格点离终点距离,以及当前网格点到终点距离大于当前网格点到潜在网格点距离则把这个潜在网格点加入候选列表;子步骤三五,从候选列表选择当前轨迹行驶方向角度最小的轨迹点作为下一个路径点以及下一个热力值计算点,如此搜索直到搜索到终点,完成热力图绘制。
13.作为优选,所述的子步骤三二还包括了每个轨迹点的热力值统计;
对于每个网格点的使用频率进行计算;对计算完成的后的结果非极大值抑制(非最大抑制)来进行进一步的热力值计算。
14.作为优选,所述的步骤一在数据预处理时还计算了候选线路轨迹每个站点到下一个站点之间的轨迹种类。
15.本发明的实质性效果在于充分考虑了公交车载机gps信号飘移、定位不精准等诸多因素,能够基于公交车的运营轨迹精确提取公交车的行驶路径,候选轨迹点大部分在道路上,在不使用其他软件来源的道路分析辅助下依旧能够输出高质量的结果;允许参考轨迹本身存在一定的误差,并对轨迹进行修正;不依赖对单条轨迹的抓路,节省轨迹预处理的时间,提升整体流程速度,并且通过更加准确的上下行划分方法,使得准确性进一步提高;多轨迹融合方法先通过计算热力图再选取候选轨迹搜索热力图的方法可以最大限度减少单一轨迹对融合轨迹的影响,提高了融合的运营轨迹的精确度。
16.本发明不仅适用于公交行驶路径的提取,也同样适用于提取其他装备gps定位设备的车辆的行驶路径,更具通用性。
附图说明
17.图1本发明的流程框图;图2本发明的候选线路轨迹图;图3本发明的融合轨迹图;
具体实施方式
18.下面通过具体实施例,并结合附图,对本发明的技术方案作进一步的具体说明。
19.实施例1如图1所示,一种公交骨干线路抓取方法,包括:步骤一,取得需要进行骨干线路抓取的公交线路数据,并进行数据预处理;步骤二,从预处理结束后的数据中生成有效的候选线路轨迹;候选线路轨迹如图2所示;步骤三,以步骤二的候选线路轨迹数据生成热力图,依照热力图生成骨干线路轨迹;步骤四,拼合骨干线路轨迹,完成抓取。
20.拼合骨干线路轨迹如图3所示。
21.所述的步骤一在数据预处理时,包括以下子步骤:子步骤一一,设定时间t,以t为时间范围取得一条公交线路的gps轨迹采集的结果数据;子步骤一二,取得此条公交线路现有的站点数据;子步骤一三,将候选轨迹gps:(p1,p2,p3,p4,p5...,p
n
)和当前线路的静态站点位置:(s1,s2,s3,s4,s5...,s
n
)转换为墨卡托坐标系;子步骤一四,计算候选gps和静态站点间的距离,确定实际的报站顺序,也就是行车的gps轨迹;具体的实施方式如下:sqrt((p0.‑
s[0])2 (p[1]
‑
s[1])2)选择距离小于200米点集作为报站序列:seq=(seq1,seq2,seq3,seq4,seq5...,seq
n
),其中sqrt是平方根计
算,seq是序列;子步骤一五,对gps轨迹进行有序切割,并剔除数据错误的gps点位。报站序列里的最大值和最小值作为切分点对gps轨迹序列进行切割。
[0022]
剔除选轨迹集gps’中经纬度为(0,0)的轨迹点和速度超过25m/s的轨迹点。
[0023]
对切割后的轨迹计算单调性:其中t表示报站序列的长度。
[0024]
判断mono是否大于0.9,对于小于等于0.9的mono的轨迹进行再次切割。
[0025]
依次判断轨迹点间距是否小于300米,如果轨迹点间距小于300米则在连接线上每5米处依次获取gps点,并得到加密集:gps”=(gps1,gps2,gps3,gps4,gps5,gps6,...,gps
m
‑1)。
[0026]
进行生成候选线路轨迹,然后再返回到子步骤一一进行下一条候选线路轨迹的生成。
[0027]
所述的步骤一在数据预处理时还计算了候选线路轨迹每个站点到下一个站点之间的轨迹种类。
[0028]
所述的步骤三包括以下子步骤:子步骤三一,从所有候选轨迹里寻找最近的站与站之间的间距作为热力图网格线的单位长度;子步骤三二,生成足够覆盖所有候选线路轨迹的网格,并计算每个点的热力值,作为热力图计算的基础;具体方式如下:使用和为经纬度坐标依轨迹顺序。
[0029]
对于每个网格点的使用频率进行计算;对于每一个热力图位置计算获取每一个网格的使用频率,其中i=(1,2,3
……
n),i为使用次数。
[0030]
对计算完成的后的结果非极大值抑制(非最大抑制)来进行进一步的热力值计算。
[0031]
其中非极大值抑制(非最大抑制)包括以下子步骤:d1,获得热力图上的轨迹点:(x1,y1),(x2,y2),(x3,y3),(x4,y4),...(x
n
,y
n
),得到当前热力图热力值最高的值heatmax;d2,判断heatmax>=20,则选择heatmap[xcurr,ycurr]>=headmap[xcurr i,ycurr j]
‑
1<=i<=1,
‑
1<=j<=1并且heatmap[xcurr,ycurr]>=0.1*heatmax的网格点作为候选网格;d3,如果heatmax>=5and heatmax<20,则选择heatmap[xcurr,ycurr]>=headmap[xcurr i,ycurr j],
‑
1<=i<=1,
‑
1<=j<=1并且heatmap[xcurr,ycurr]>=0.2*heatmax的网格点作为候选网格;d4,如果heatmax<5,则选择heatmap[xcurr,ycurr]>=headmap[xcurr i,ycurr j]
‑
1<=i<=1,
‑
1<=j<=1的网格点作为候选网格。
[0032]
子步骤三三,以候选轨迹中起点重叠数量最高的点作为热力图计算的起点,同理得到终点;子步骤三四需要区分实际轨迹种类对于直线轨迹采用以下方式:子步骤三四,选择与当前网格点最近的5个未被走过的网格点作为下一个时刻的
潜在网格点,如果潜在网格点满足这个网格点存在热力值,并且潜在网格点离终点距离小于当前网格点离终点距离,以及当前网格点到终点距离大于当前网格点到潜在网格点距离则把这个潜在网格点加入候选列表;如果候选列表中存在值,则选择与当前轨迹行驶方向角度最小的轨迹点加入轨迹序列,并且把所有已经使用的网格点标记为已使用;当出现选列表中不存在值,则从潜在网格点中选择离终点最近的网格点最为候选网格点。
[0033]
对于曲线轨迹采用以下方式:计算所有候选轨迹的非直线系数与平均非直线系数的差值,计算所有候选轨迹的轨迹点数目平均数。
[0034]
将候选轨迹按照非直线系数差值从小到大排序,筛选出轨迹点数目大于平均轨迹点数目和非直线系数差值最小的轨迹作为参考轨迹。
[0035]
参考轨迹序列选择当前轨迹点,搜索离当前轨迹的最近的5个网格点作为潜在网格。
[0036]
判断潜在网格与当前轨迹行驶方向是否小于130度,是则将潜在网格加入候选网格。
[0037]
对于当前轨迹行驶方向大于等于130度的情况,如果候选网格中值为空,则使t 1,并继续搜索参考轨迹。
[0038]
候选网格集合中的网格与当前轨迹行驶方向最小角度大于100度,则删去当前维护的轨迹序列最后一个网格点,行驶方向变为轨迹序列中t
‑
2的网格点到t
‑
1的网格点行驶角度,将当前网格点加入已经走过的轨迹点列表并使t
‑
1,并继续搜索参考轨迹。
[0039]
候选网格集合中的网格与当前轨迹行驶方向最小角度小于等于100度,将网格点加入当前维护的轨迹序列,更新轨迹行驶角度。
[0040]
轨迹t大于参考轨迹的长度时则完成轨迹搜索,否则t 1并继续搜索参考轨迹。
[0041]
子步骤三五,从候选列表选择当前轨迹行驶方向角度最小的轨迹点作为下一个路径点以及下一个热力值计算点,如此搜索直到搜索到终点,完成热力图绘制。
[0042]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

