1.本发明属于交通工程领域,具体涉及一种平行流交叉口左转非机动车钩形转弯穿越的方法及系统。
背景技术:
2.非常规交叉口作为城市交通拥堵治理的一种新颖解决方案,具有相位数减少、容量提升、延误降低、周期时长缩短等优势,目前部分非常规交叉口已经在我国多个城市进行了实地应用,实际应用效果良好。
3.平行流交叉口是非常规交叉口的一种,相对于常规平面交叉口,理论上能够提升一倍左右的容量,可以有效缓解城市交叉口交通拥堵。专利cn109615893a提出了一种左转右置的平行流交叉口,将进口左转车道置于进口直行车道外侧,在进口直行车道和进口左转车道之间设置移位左转车道,在进口道路段上设置预信号交叉口,通过移位左转车道将主信号交叉口左转和直行冲突转移到下游预信号交叉口,实现主信号交叉口同时放行左转、直行和右转车流,显著提升了交叉口通行能力。专利cn110060488a进一步提出了左转左置和左转中置的平行流交叉口。
4.上述仅探讨了平行流交叉口机动车通行问题,但并没有解决平行流交叉口非机动车通行问题,左转非机动车和直行机动车相互干扰严重,阻碍了平行流交叉口的运行效率,以至于有研究认为平行流交叉口适用于我国郊区道路。考虑到非机动车出行是我国居民交通出行的重要方式,为使平行流交叉口更好符合我国城市道路交叉口交通状况,解决平行流交叉口左转非机动车过街问题是必不可少的。
技术实现要素:
5.本发明的目的是为解决在现有平行流交叉口中,左转非机动车和直行机动车存在相互干扰,影响平行流交叉口运行效率的问题,而提出一种平行流交叉口左转非机动车钩形转弯穿越的方法及系统。
6.本发明为解决上述技术问题所采取的技术方案是:
7.基于本发明的一个方面,一种平行流交叉口左转非机动车钩形转弯穿越的方法,所述方法包括交通几何设计和信号控制,所述交通几何设计具体为:
8.对于平行流交叉口的各个进口,在进口直行车道前端的路口非机动车道处,且靠近主信号交叉口正中央的一侧设置左转非机动车待行区;
9.所述信号控制具体为:
10.主信号交叉口机动车信号为两相位控制,所述两相位分别为东西直行和南北左转组成的组合相位以及南北直行和东西左转组成的组合相位;
11.左转非机动车的放行分为两个阶段,第一阶段为左转非机动车从起点安全岛经路口非机动车道行驶至左转非机动车待行区的过程,第二阶段为左转非机动车从左转非机动车待行区向终点安全岛行驶的过程;
12.东西直行机动车、南北左转机动车、东西左转非机动车的第一阶段以及上一相位行驶至东西进口左转非机动车待行区上的左转非机动车辆的第二阶段同相位放行;
13.南北直行机动车、东西左转机动车、南北左转非机动车的第一阶段以及上一相位行驶至南北进口左转非机动车待行区上的左转非机动车辆的第二阶段同相位放行;
14.主信号东西直行机动车相位绿灯比南北左转机动车相位绿灯迟起t时间,上一相位行驶至东西进口左转非机动车待行区上的左转非机动车辆在东西直行机动车相位绿灯启亮前完成放行,主信号东西直行机动车相位绿灯与南北左转机动车相位绿灯同时结束;主信号东西直行机动车相位绿灯与南北左转机动车相位绿灯结束后,东西左转机动车相位绿灯启亮;
15.主信号南北直行机动车相位绿灯比东西左转机动车相位绿灯迟起t时间,上一相位行驶至南北进口左转非机动车待行区上的左转非机动车辆在南北直行机动车相位绿灯启亮前完成放行,主信号南北直行机动车相位绿灯和东西左转机动车相位绿灯同时结束;主信号南北直行机动车相位绿灯和东西左转机动车相位绿灯结束后,南北左转机动车相位绿灯启亮;
16.所述时间t为:
[0017][0018]
式中:为左转非机动车在第二阶段从左转非机动车待行区到达终点安全岛的行驶轨迹长度,单位为m;l
v
为直行机动车在主信号交叉口的行驶轨迹长度,单位为m;为左转非机动车行驶速度,单位为m/s;为直行机动车行驶速度,单位为m/s。
[0019]
基于本发明的另一个方面,一种平行流交叉口左转非机动车钩形转弯穿越的系统,用于执行一种平行流交叉口左转非机动车钩形转弯穿越的方法。
[0020]
本发明的有益效果是:本发明提出了一种平行流交叉口左转非机动车钩形转弯穿越的方法及系统,本发明通过对平行流交叉口几何布局进行重新设计,并提出相应的控制方法,使平行流交叉口左转非机动车和直行机动车不再相互干扰,保证了平行流交叉口的运行效率,而且使得平行流交叉口设计更符合我国交通应用场景,有助于推动平行流交叉口的推广应用,为解决城市交叉口拥堵提供了一种新的思路。
附图说明
[0021]
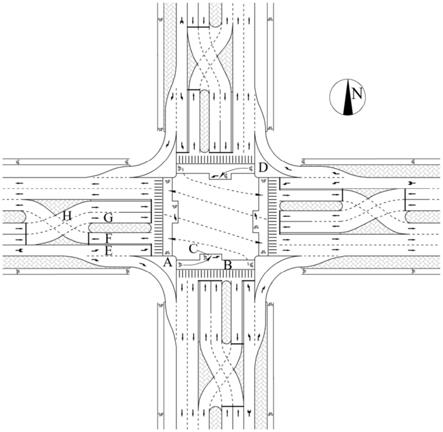
图1为平行流交叉口左转非机动车钩形转弯式穿越的交通设计和东西左转非机动车第一阶段交通组织示意图;
[0022]
图中,e为进口左转车道,g为进口直行车道(相当于专利cn109615893a中的直行车道),f为移位左转车道(相当于专利cn109615893a中的逆向右转车道),h为预信号交叉口(相当于专利cn109615893a中的临时交叉口),c为左转非机动车待行区,b为路口非机动车道,a和d均为安全岛;
[0023]
西进口左转非机动车是从安全岛a往安全岛d的左转过程,因此,对于西进口左转非机动车来说,a是起点安全岛、d是终点安全岛;东进口左转非机动车是从安全岛d往安全岛a的左转过程,对应东进口左转非机动车来说,d是起点安全岛、a是终点安全岛;
[0024]
图2为平行流交叉口左转非机动车钩形转弯式穿越的交通设计和东西左转非机动车第二阶段交通组织示意图;
[0025]
图3为平行流交叉口左转非机动车钩形转弯式穿越的主信号交叉口相位相序方案的示意图。
具体实施方式
[0026]
具体实施方式一、结合图1、图2和图3说明本实施方式。本实施方式所述的一种平行流交叉口左转非机动车钩形转弯穿越的方法,包括交通几何设计和信号控制;所述交通几何设计具体为:
[0027]
对于平行流交叉口的各个进口,在进口直行车道前端的路口非机动车道处,且靠近主信号交叉口正中央的一侧设置左转非机动车待行区;
[0028]
以西进口为例,进口方向是指从西侧向主信号交叉口行驶的方向,西进口的机动车直行车道为图1中的g;对于其它进口的定义同理;路口非机动车道与人行横道平行,且比人行横道更靠近主信号交叉口;
[0029]
所述信号控制具体为:
[0030]
主信号交叉口机动车信号为两相位控制,所述两相位分别为东西直行和南北左转组成的组合相位以及南北直行和东西左转组成的组合相位;
[0031]
左转非机动车的放行分为两个阶段,第一阶段为左转非机动车从起点安全岛经路口非机动车道行驶至左转非机动车待行区的过程,第二阶段为左转非机动车从左转非机动车待行区向终点安全岛行驶的过程;
[0032]
东西直行机动车、南北左转机动车、东西左转非机动车的第一阶段以及上一相位行驶至东西进口左转非机动车待行区上的左转非机动车辆的第二阶段同相位放行;
[0033]
南北直行机动车、东西左转机动车、南北左转非机动车的第一阶段以及上一相位行驶至南北进口左转非机动车待行区上的左转非机动车辆的第二阶段同相位放行;
[0034]
主信号东西直行机动车相位绿灯比南北左转机动车相位绿灯迟起t时间,上一相位行驶至东西进口左转非机动车待行区上的左转非机动车辆在东西直行机动车相位绿灯启亮前完成放行,主信号东西直行机动车相位绿灯与南北左转机动车相位绿灯同时结束;主信号东西直行机动车相位绿灯与南北左转机动车相位绿灯结束后,东西左转机动车相位绿灯启亮;
[0035]
主信号南北直行机动车相位绿灯比东西左转机动车相位绿灯迟起t时间,上一相位行驶至南北进口左转非机动车待行区上的左转非机动车辆在南北直行机动车相位绿灯启亮前完成放行,主信号南北直行机动车相位绿灯和东西左转机动车相位绿灯同时结束;主信号南北直行机动车相位绿灯和东西左转机动车相位绿灯结束后,南北左转机动车相位绿灯启亮;
[0036]
所述时间t为:
[0037][0038]
式中:为左转非机动车在第二阶段从左转非机动车待行区到达终点安全岛的行
驶轨迹长度,单位为m;l
v
为直行机动车在主信号交叉口的行驶轨迹长度,单位为m;为左转非机动车行驶速度,单位为m/s;为直行机动车行驶速度,单位为m/s。
[0039]
具体实施方式二:本实施方式与具体实施方式一不同的是,所述东西直行机动车、南北左转机动车、东西左转非机动车的第一阶段以及上一相位行驶至东西进口左转非机动车待行区上的左转非机动车辆的第二阶段同相位放行;南北直行机动车、东西左转机动车、南北左转非机动车的第一阶段以及上一相位行驶至南北进口左转非机动车待行区上的左转非机动车辆的第二阶段同相位放行;其具体过程为:
[0040]
当主信号南北左转机动车相位绿灯启亮后:
[0041]
西进口的左转非机动车从起点安全岛经南进口的路口非机动车道行驶至位于南进口的左转非机动车待行区,东进口的左转非机动车从起点安全岛经北进口的路口非机动车道行驶至位于北进口的左转非机动车待行区;
[0042]
南北左转机动车通过主信号交叉口;
[0043]
在东西直行机动车相位绿灯启亮前,上一相位行驶至东西进口左转非机动车待行区上的左转非机动车辆完成放行;
[0044]
待东西直行机动车相位绿灯启亮后,东西直行机动车通过主信号交叉口;
[0045]
主信号南北左转机动车相位绿灯和东西直行机动车相位绿灯结束后,主信号东西左转机动车相位绿灯启亮:
[0046]
南进口的左转非机动车从起点安全岛经东进口的路口非机动车道行驶至位于东进口的左转非机动车待行区,北进口的左转非机动车从起点安全岛经西进口的路口非机动车道行驶至位于西进口的左转非机动车待行区;
[0047]
东西左转机动车通过主信号交叉口;
[0048]
在南北直行机动车相位绿灯启亮前,上一相位行驶至南北进口左转非机动车待行区上的左转非机动车辆完成放行;
[0049]
在南北直行机动车相位绿灯启亮后,南北直行机动车通过主信号交叉口。
[0050]
由于非机动车行驶速度小于机动车行驶速度,为保证安全,第二阶段直行机动车相位绿灯应迟起,以保证直行机动车始终在左转非机动车后面。当左转非机动车全部行驶至终点安全岛时,直行机动车也行驶到出口直行车道。东西左转非机动车第二阶段开始时位于主信号南北直行机动车前,相位放行时,主信号南北直行机动车跟随在东西左转非机动车后面,避免了两者的冲突。
[0051]
与已有设计方案相比,本发明方法并没有增加额外的用地面积,对已建设的平行流交叉口也不需要进行大规模改造,只需局部调整便可采用本发明的交通设计方法,综合效益更优。
[0052]
具体实施方式三:本实施方式与具体实施方式二不同的是,所述左转非机动车待行区的容量满足如下条件:
[0053][0054]
式中:n
max
为左转非机动车待行区所能容纳的非机动车数量,单位为辆;μ为非机动车流量波动系数;c为信号周期时长,单位为s;为左转非机动车交通需求,单位为辆/s。
[0055]
具体实施方式四:本实施方式与具体实施方式三不同的是,所述左转非机动车完
成第一阶段所需的时间不大于机动车相位时长;
[0056][0057]
式中:l
b
为路口非机动车道长度,单位为m;υ
b
为非机动车行驶速度,单位为m/s;为直行非机动车交通需求,单位为辆/s;为路口非机动车道饱和流率,单位为辆/s;为第一阶段左转机动车相位时长,单位为s。
[0058]
具体实施方式五:本实施方式与具体实施方式四不同的是,所述时间t满足:
[0059]
t
min
≤t≤t
max
[0060]
式中:t
min
为直行机动车相位绿灯迟起时间最小值,单位是s;t
max
为直行机动车相位绿灯迟起时间最大值,单位是s。
[0061]
本实施方式的目的是为了保证左转非机动车第二阶段行驶安全。
[0062]
具体实施方式六:本实施方式与具体实施方式四不同的是,所述平行流交叉口为四路交叉的交叉口。
[0063]
具体实施方式七:本实施方式与具体实施方式六不同的是,所述平行流交叉口为左转左置的平行流交叉口。
[0064]
本实施方式中的平行流交叉口为专利cn109615893a中的左转右置平行流交叉口设计方案。
[0065]
具体实施方式八:本实施方式与具体实施方式六不同的是,所述平行流交叉口为左转中置的平行流交叉口。
[0066]
本实施方式中的平行流交叉口为专利cn110060488a中的左置左置平行流交叉口设计方案。
[0067]
具体实施方式九:本实施方式与具体实施方式六不同的是,所述平行流交叉口为左转右置的平行流交叉口。
[0068]
本实施方式中的平行流交叉口为专利cn110060488a中的左置中置平行流交叉口设计方案。
[0069]
是否设置右转专用道、车道数及车道分配等都不影响本发明应用,本发明也可应用于其他形式的平行流交叉口。
[0070]
具体实施方式十:本实施方式的一种平行流交叉口左转非机动车钩形转弯穿越的系统,该系统用于执行具体实施方式一至具体实施方式九之一的一种平行流交叉口左转非机动车钩形转弯穿越的方法。
[0071]
实施例
[0072]
本发明的关键技术方案如下:
[0073]
所述平行流交叉口左转非机动车钩形转弯式穿越的交通几何设计包括:
[0074]
在主信号交叉口进口直行车道(图1中g)前端的路口非机动车道(图1中b)处,往主信号交叉口正中央的一侧,设置左转非机动车待行区(图1中c),仅供左转非机动车从起点安全岛(图1中a)到达此处后停车等待第二阶段信号灯指示。当左转非机动车待行区所能容纳的非机动车数量不满足需求时,可根据需要部分占用移位左转车道(图1中f)和进口直行车道之间的隔离带,或者将停车线、人行横道和路口非机动车道后移,以增加左转非机动车
待行区面积。
[0075]
所述平行流交叉口左转非机动车钩形转弯式穿越的信号相位相序方案包括:
[0076]
主信号交叉口信号为两相位控制,分为东西直行和南北左转组成的组合通行相位、南北直行和东西左转组成的组合通行相位。东西左转非机动车第一阶段与主信号东西直行和南北左转机动车同相位放行,东西左转非机动车第二阶段利用主信号南北直行机动车相位启亮前的时间完成放行。南北左转非机动车第一阶段与主信号南北直行和东西左转机动车同相位放行,南北左转非机动车第二阶段利用主信号东西直行机动车相位启亮前的时间完成放行。
[0077]
所述平行流交叉口左转非机动车钩形转弯式穿越的交通组织系统包括:
[0078]
东西左转非机动车第一阶段从起点安全岛经路口非机动车道行驶至左转非机动车待行区。东西左转非机动车第一阶段放行时,主信号机动车相位显示东西直行和南北左转,东西左转非机动车与同相位允许放行的机动车车流不存在冲突。东西左转非机动车第二阶段从左转非机动车待行区行驶至终点安全岛,从而实现了整个左转过程。东西左转非机动车第二阶段开始时位于主信号南北直行机动车前,相位放行时,主信号南北直行机动车跟随在东西左转非机动车后面,避免了两者的冲突。
[0079]
南北左转非机动车第一阶段从起点安全岛经路口非机动车道行驶至左转非机动车待行区。南北左转非机动车第一阶段放行时,主信号机动车相位显示南北直行和东西左转,南北左转非机动车与同相位允许放行的机动车车流不存在冲突。南北左转非机动车第二阶段从左转非机动车待行区行驶至终点安全岛,从而实现了整个左转过程。南北左转非机动车第二阶段开始时位于主信号东西直行机动车前,相位放行时,主信号东西直行机动车跟随在南北左转非机动车后面,避免了两者的冲突。
[0080]
所述平行流交叉口左转非机动车钩形转弯式穿越的控制方法包括:
[0081]
左转非机动车待行区要求能够容纳第一阶段到来的所有左转非机动车停车排队,具体条件如下:
[0082][0083]
式中:n
max
为左转非机动车待行区所能容纳的非机动车数量,辆;μ为非机动车流量波动系数;c为信号周期时长,s;为左转非机动车交通需求,辆/s。
[0084]
所有左转非机动车完成第一阶段穿越所需的时间不大于机动车相位时长,具体条件如下
[0085][0086]
式中:l
b
为路口非机动车道长度,m;υ
b
为非机动车行驶速度,m/s;为直行非机动车交通需求,辆/s;为路口非机动车道饱和流率,辆/s;为第一阶段机动车相位时长,s。
[0087]
由于非机动车行驶速度小于机动车行驶速度,为保证安全,第二阶段直行机动车相位绿灯应迟起,以保证直行机动车始终在左转非机动车后面。当左转非机动车全部行驶至路侧安全岛时,直行机动车也行驶到出口直行车道。第二阶段直行机动车相位绿灯迟起
时间的计算公式如下
[0088][0089]
式中:为左转非机动车在第二阶段从左转非机动车待行区到达路侧安全岛的行驶轨迹长度,m;l
v
为直行机动车在主信号交叉口的行驶轨迹长度,m;为左转非机动车行驶速度,m/s;为直行机动车行驶速度,m/s。
[0090]
为保证左转非机动车第二阶段行驶安全,直行机动车相位绿灯迟起时间应满足如下约束:
[0091]
t
min
≤t≤t
max
[0092]
式中:t
min
直行机动车相位绿灯迟起时间最小值/s;t
max
直行机动车相位绿灯迟起时间最大值/s。
[0093]
本发明不局限于图1所示的设置有右转专用道的左转右置的平行流交叉口,可应用于左转左置、左转中置、左转右置的平行流交叉口,以及是否设置右转专用道、车道数及车道分配等都不影响本发明应用,也可应用于其他形式的平行流交叉口。
[0094]
本发明的上述算例仅为详细地说明本发明的计算模型和计算流程,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动,这里无法对所有的实施方式予以穷举,凡是属于本发明的技术方案所引伸出的显而易见的变化或变动仍处于本发明的保护范围之列。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

