1.本发明属于书籍自动抓取技术领域,具体涉及一种基于订单式的图书馆图书借阅装置及方法。
背景技术:
2.我国图书馆建设迅速发展,馆内流通人数和书刊文献外借册次逐年递增,然而,我国绝大多数图书馆都还采用着传统的借书模式,即读者需到图书馆馆藏处按照索书号找到自己想要的书籍,读者由于对图书分布信息不熟悉、图书馆书籍整理具有延时性等原因,读者在寻找书籍时难度较大、耗时较长、效率较低。同时,不同读者有不同的图书借阅需求,针对多样化的订单,不仅对读者来说费时费力,给图书管理员也带来了大量的工作量。
3.公开号为cn111762487a的中国专利公开了一种用于图书馆的图书自动存取装置和存取方法,包括书架和机械抓手,所述机械抓手安装在图书配送车上;所述书架内部从上往下等间距设有多层搁板,每层所述搁板上沿水平方向设有多个相互平行的隔板,相邻隔板之间用于存放图书;所述书架上还设有图书管理模块和图书信息模块,所述图书管理模块用于实时检测、记录和显示书架上图书的缺失情况;所述图书信息模块用于存储图书的编号信息;所述机械抓手用于夹取图书,完成图书的存取动作。本发明解决了常规图书馆存在图书位置不准、姿态各异、自动存取困难等问题,实现图书在书架位置的唯一化、可调化、数据化,为机械手精准反馈图书位置、厚度和出版信息,保障其自动存取图书。
4.公开号为cn111843972a的中国专利公开了一种高校智慧图书馆系统,利用线上app、综合管理系统与线下智能设备相互配合,实现图书馆借还流程的无人化工作模式,解放更多人力资源,推动图书馆无人化、智能化建设;其中,借书时,用户在线上app完成预约借阅,综合管理系统对借阅信息进行处理,发送任务指令给智能借书车,智能借书车将目标图书配送并放置到智能借还柜内,用户可直接到智能还书柜取书;还书时,用户通过智能还书柜进行归还,智能借还柜对归还图书进行自动加磁和分类存放,综合管理系统发送任务指令给智能借书车,智能借书车从借还柜取书并放回到智能书架上;智能书架对书架上图书进行位置信息绑定并建立数据库,通过数据库便可查询到具体图书,便于图书盘点。
5.目前已有一些图书自助借阅装置,但可借阅图书数量有限;针对不同厚度、大小的图书,现有图书借阅小车装置较繁琐;且针对不同用户,订单也不同,针对多样化的订单,所借阅图书数量不同,若借阅多本图书,用户取书时仍存在费时问题;另外,现有的图书借阅装置存在定位不精准的问题,抓取书籍时容易损坏书籍。
技术实现要素:
6.本发明的目的是针对现有技术存在的问题,提供一种基于订单式的图书馆图书借阅装置及方法。
7.为实现上述目的,本发明采用的技术方案是:
8.一种基于订单式的图书馆图书借阅装置,包括智能借书车和智能借书柜;所述智
能借书车包括通用底盘,所述通用底盘底部设有行走轮,用于驱动智能借书车行走;所述通用底盘上设有书籍存放装置,用于存放书籍;所述书籍存放装置上设有智能综合管理平台和机械手臂;所述智能综合管理平台包括信息存储模块和设备管理模块,用于存储书籍信息、匹配智能借书柜以及实时监测订单完成情况;所述机械手臂用于抓取书籍;所述智能借书柜包括书籍管理系统和柜体,所述柜体包括多个用于存放书籍的订单式储书柜;所述书籍管理系统用于管理订单信息和订单式储书柜内存储的书籍信息。
9.具体地,所述机械手臂为自带定位式机械手臂,其通过多自由度传动装置安装在智能借书车上,用于抓取图书。
10.具体地,所述书籍存放装置内部从上往下依次设有多层第一搁板,每层所述第一搁板上从左往右按不同间距依次设有多个第一隔板,相邻两隔板之间形成一个储书栏,用于存放书籍;所述第一搁板为内低外高倾斜设置,防止运送过程中书籍颠簸掉落。
11.进一步地,所述第一隔板的两侧面均设有凹槽和弹性夹片;所述弹性夹片一端固定安装在第一隔板上,另一端设有微型滚珠,所述微型滚珠活动嵌设在凹槽内。通过在第一隔板的两侧面设置凹槽和弹性夹片,可以方便夹紧一定厚度的图书,相邻两个第一隔板之间的间距依据图书馆图书借阅厚度的大数据统计进行设计。通过在弹性夹片的活动端设置微型滚珠,采用滚动代替滑动,可以减小存放不同厚度的图书时,弹性夹片与第一隔板面板之间的摩擦。
12.具体地,所述机械手臂包括手掌执行机构、左手指执行机构和右手指执行机构,所述左手指执行机构和右手指执行机构均呈e字形,且e字形开口均朝外;这种形状的设计能确保机械手臂有效地抓取图书,而且确保书籍书口位置不会出现张开的喇叭状;所述手掌执行机构为框架结构,且框架的两侧壁之间设有横向的导杆,所述左手指执行机构和右手指执行机构上均设有导向孔,所述左手指执行机构和右手指执行机构均通过导向孔滑动安装在手掌执行机构的导杆上;所述左手指执行机构、右手指执行机构与手掌执行机构之间设有伸缩装置,所述伸缩装置用于驱动左手指执行机构和右手指执行机构在导杆上滑动。
13.进一步地,所述左手手指执行机构的内侧面板上设有防滑垫片和压力传感器;所述防滑垫片用于增大摩擦力,防止书籍滑落;所述压力传感器用于检测手指执行机构与书籍之间的压力;所述防滑垫片和压力传感器厚度相同,确保能增大摩擦力的同时也能准确测得手指执行机构与书籍之间的压力;所述右手手指执行机构的内侧面板上设有多个微型滚轮,所述微型滚轮的滚动方向沿开口方向,便于书籍更好地从两手指执行机构间滑落到订单式储书柜中,所述微型滚轮表面有圈状纹路,增大摩擦力,可以进一步防止书本掉落。
14.具体地,所述书籍存放装置上还设有高精度定位装置,所述高精度定位装置包括a1 级定位装置和b1级定位装置;所述a1级定位装置为多个方形定位条码,所述方形定位条码纵向安装在每层第一搁板最右侧,用于定位书籍所在层数;所述b1级定位装置为多个四角激光发射装置,所述四角激光发射装置安装于第一搁板的相邻两个第一隔板正中间,用于目标书籍的精确定位;所述b1级定位装置的中部还设有用于显示动态二维码的信息存储模块,所述动态二维码存储有书籍的名称、出版商、厚度信息以及书籍所对应的订单信息和书籍所在储书栏的两个第一隔板之间的距离信息;所述手掌执行机构的下侧设有四角激光接收装置,所述四角激光接收装置的中部设有扫描识别器;所述四角激光接收装置与位置、尺寸与四角激光发射装置的位置、尺寸相配,所述扫描识别器在四角激光接收装置中的位
置与动态二维码在b1级定位装置中的位置对应。
15.进一步地,所述订单式储书柜包括辅助定位装置,所述辅助定位装置包括a2级定位装置、b2级定位装置和c级定位装置,用于自带定位式机械手臂与智能借书柜的定位。所述a2级定位装置为多个方形定位条码,设在每个订单式储书柜的右下方,用于自带定位式机械手臂扫描从而找到对应的订单式储书柜;所述b2级定位装置为四角激光发射装置,设在每个订单式储书柜的右侧边栏,所述b2级定位装置发射四束定位激光,与自带定位式机械手臂上的四角激光接收装置相对应,实现自带定位式机械手臂与订单式储书柜的精准定位;所述c级定位装置为红外接收装置,安装在订单式储书柜的内部顶面;所述左手指执行机构的外侧面板上设有与所述红外接收装置相匹配的红外发射装置,用于确定自带定位式机械手臂在订单式储书柜内部的定位。
16.具体地,所述订单式储书柜还包括多个订单管理模块,所述订单管理模块为多个固定二维码,所述固定二维码安装在b2级定位装置的中部;自带定位式机械手臂扫描对应固定二维码后将图书信息录入订单管理模块中该订单式储书柜所对应的订单,用于监测更新订单完成情况。
17.进一步地,所述柜体内部从上往下依次设有多层第二搁板,相邻两第二搁板之间的间距从上往下依次增大;所述间距依据图书馆单位订单借阅图书总厚度的统计数据来设计;所述第二搁板的上表面为内低外高的倾斜面,确保存入图书时,图书落在订单式储书柜中,防止书籍掉落;所述第二搁板的上表面设有消磁装置,用于对存入订单式储书柜内的书籍进行扫描消磁;所述第二搁板的下表面设有所述c级定位装置,用于接收机械手臂上的红外发射装置发射的红外线,实现机械手臂在订单式储书柜内部的定位;所述柜体从左往右等间距安装有多个第二隔板。
18.与上述图书借阅装置相对应的,本发明还公开了一种基于订单式的图书馆图书借阅方法,按取书与存书整个流程依次包括:取书a1级定位方法、取书b1级定位方法、取书方法、存书a2级定位方法、存书b2级定位方法、存书c级定位方法和存书方法;
19.所述取书a1级定位方法为:机械手臂由下往上依次扫描书籍存放装置上a1级定位装置的方形定位条码,确定目标书籍在书籍存放装置中的层数;所述取书的a1级定位算法采取从下到上即层数由低到高的扫描顺序;
20.所述取书b1级定位方法为:确定目标书籍的层数后,机械手臂由右向左移动,同时通过扫描识别器识别视野范围内的动态二维码,将扫码获取的书籍信息与目标书籍信息进行比对,比对信息一致后,b2级定位装置的四角发射四束激光,再通过调整机械手臂的空间状态直至机械手臂上的四角激光接收装置均接收到对应的激光;
21.所述取书方法为:机械手臂根据扫码获取的书籍厚度信息和对应储书栏的距离信息,控制两个手指执行机构张开,张开距离较目标书籍厚度大2mm;机械手臂伸入储书栏内预设深度后,控制两个手指执行机构夹紧;再控制机械手臂抽出,并转至预定朝向;
22.所述存书a2级定位方法为:通过机械手臂上的扫描识别器扫描订单式储书柜上a2级定位装置的方形定位条码,将扫描获取的编号与目标订单式储书柜的编号进行比对,并根据比对结果调整机械手臂的位置;目标订单式储书柜对应的自动开关门开启;
23.所述存书b2级定位方法为:比对编号信息一致后,b2级定位装置的四角发射四束激光,机械手臂顺时针转动90度,再通过调整机械手臂的空间状态直至机械手臂上的四角
激光接收装置均接收到对应的激光;
24.所述存书c级定位方法为:机械手臂伸入目标订单式储书柜预设深度,左手指执行机构上的红外发射装置与订单式储书柜内部顶面的红外接收装置进行匹配,直至红外接收装置接收到红外发射装置发射的红外信号;
25.所述存书方法为:机械手臂朝下转动一定倾角,张开手指执行机构,直至左手指执行机构上的压力传感器数值为0;机械手臂从订单式储书柜内抽出,自动开关门关闭。
26.优选地,所述图书借阅方法还包括动态零点确定方法,所述动态零点确定方法为:当完成一本目标书籍的抓取存放操作后,若下一本目标书籍与上一本目标书籍在智能借书车的同一层,则机械手臂按原路径返回,此时机械手臂的归零点位为上一本目标书籍的位置;若下一本目标书籍与上一本目标书籍不在智能借书车的同一层,则归零点位为下一本目标书籍所在层数的最右端所对应的a1级定位装置的位置处。
27.与现有技术相比,本发明的有益效果是:
28.(1)本发明利用软件模块与智能设备相互配合,实现对图书的识别、抓取、存放,智能借书车、智能借书柜相互配合,智能借书车将所借阅的书籍送到智能借书柜里,借书时,用户可如取快递式从订单式储书柜中一次性取走多本书籍,节省了用户大量的找书取书时间的同时,也提高图书馆工作效率,实现借阅流程的无人化;
29.(2)本发明采用多级有序的定位装置,取书时根据a1级定位装置找到对应目标图书位置,根据b1级定位装置进行精准定位;放书时根据a2级定位装置找到目标订单式储书柜放入位置,根据b2级定位装置进行精确定位,再根据c级定位装置调整机械手臂的空间位置状态进行图书存放,多级定位装置层层递进,确保精准取放目标书籍;
30.(3)本发明在第一隔板上设置可活动弹性夹片,虽然第一隔板固定安装不能移动,但相邻两第一隔板之间可通过弹性夹片的活动存放一定厚度范围内的书籍,在适应不同厚度书籍的同时,也借助可活动弹性夹片的弹力作用将书本夹紧,同时也节约了成本;
31.(4)本发明充分运用大数据统计规律,相邻第一隔板的距离依据于图书馆图书借阅厚度的大数据统计进行设计;订单式储书柜高度设定依据图书馆单位订单借阅图书总厚度的统计数据进行设计。
附图说明
32.图1为本发明实施例一种基于订单式的图书馆图书借阅装置的整体结构示意框图;
33.图2为本发明实施例中智能借书车的正面结构示意图;
34.图3为本发明实施例中智能借书柜的结构示意图;
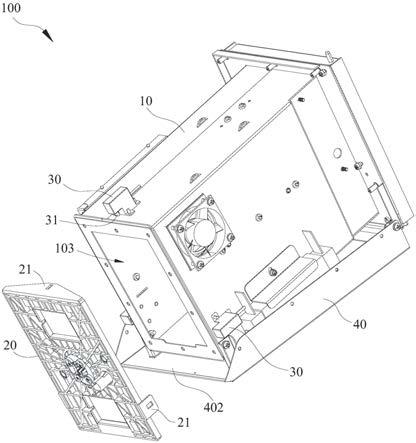
35.图4为本发明实施例中智能借书车的侧面结构示意图;
36.图5为本发明实施例中第一隔板的结构示意图;
37.图6为本发明实施例中第一隔板的面板结构示意图;
38.图7为本发明实施例中可活动弹性夹片的结构示意图;
39.图8为本发明实施例中b1级定位装置与信息存储模块的相对位置结构示意图;
40.图9为本发明实施例中机械手臂的结构示意图;
41.图10为本发明实施例中左手指执行机构的左侧面结构示意图;
42.图11为本发明实施例中左手指执行机构的右侧面结构示意图;
43.图12为本发明实施例中右手指执行机构的结构示意图;
44.图13为本发明实施例中手掌执行机构的结构示意图;
45.图14为本发明实施例中第二搁板和第二隔板的安装结构示意图;
46.图15为本发明实施例一种基于订单式的图书馆图书借阅方法的全流程示意图;
47.图16为本发明实施例中图书抓取过程的定位流程示意图;
48.图17为本发明实施例中图书抓取过程的抓取流程示意图;
49.图18为本发明实施例中图书存放过程a2级定位流程示意图;
50.图19为本发明实施例中图书存放过程b2级定位流程示意图;
51.图20为本发明实施例中图书存放过程c级定位流程示意图;
52.图21为本发明实施例中图书存放过程存放流程示意图;
53.图中:1、机械手臂;101、手掌执行机构;1011、导杆;1012、伸缩杆;1013、微型伸缩电机;1014、四角激光接收装置;1015、扫描识别器;102、左手指执行机构;1021、红外发射装置;1022、压力传感器;1023、防滑垫片;103、右手指执行机构;1031、微型滚轮;104、多自由度传动装置;1041、水平滑动装置;1042、前后伸缩装置;1043、上下移动装置;1044、旋转装置;2、书籍存放装置;201、高精度定位装置;2011、a1级定位装置;2012、b1级定位装置;202、第一搁板;203、第一隔板;2031、凹槽;2032、弹性夹片;2033、微型滚珠;3、智能综合管理平台;301、信息存储模块;302、设备管理模块;4、通用底盘;5、书籍管理系统;501、订单管理模块;6、订单式储书柜;601、辅助定位装置;6011、a2级定位装置;6012、b2级定位装置;6013、c级定位装置;602、第二搁板;6021、消磁装置;603、第二隔板;604、自动开关门。
具体实施方式
54.下面将结合本发明中的附图,对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动条件下所获得的所有其它实施例,都属于本发明保护的范围。
55.实施例1
56.如图1至3所示,本实施例提供了一种基于订单式的图书馆图书借阅装置,包括智能借书车和智能借书柜;所述智能借书车包括通用底盘4,所述通用底盘4底部设有行走轮,用于驱动智能借书车行走;所述通用底盘4上设有书籍存放装置2,用于存放书籍;所述书籍存放装置2上设有智能综合管理平台3和机械手臂1;所述智能综合管理平台3包括信息存储模块301和设备管理模块302,用于存储书籍信息、匹配智能借书柜以及实时监测订单完成情况;所述机械手臂1用于抓取书籍;所述智能借书柜包括书籍管理系统5和柜体,所述柜体包括多个用于存放书籍的订单式储书柜6;所述书籍管理系统5用于管理订单信息和订单式储书柜6内存储的书籍信息。
57.具体地,所述机械手臂1为自带定位式机械手臂1,其通过多自由度传动装置104安装在智能借书车上,用于抓取图书。
58.进一步地,如图4所示,所述多自由度传动装置104包括水平滑动装置1041、前后伸缩装置1042、上下移动装置1043和旋转装置1044,各个传动装置靠电机驱动,实现自带定位
式机械手臂1在空间内的多自由度运动,各传动装置的长度依据具体场馆需求而定。
59.具体地,所述书籍存放装置2内部从上往下依次设有多层第一搁板202,每层所述第一搁板202上从左往右按不同间距依次设有多个第一隔板203,相邻两隔板之间形成一个储书栏,用于存放书籍;所述第一搁板202为内低外高倾斜设置,防止运送过程中书籍颠簸掉落。
60.进一步地,如图5至7所示,所述第一隔板203的两侧面均设有凹槽2031和弹性夹片2032,所述弹性夹片2032为可活动弹簧夹片;所述弹性夹片2032一端固定安装在第一隔板203上,另一端设有微型滚珠2033,所述微型滚珠2033活动嵌设在凹槽2031内。通过在第一隔板203的两侧面设置凹槽2031和弹性夹片2032,可以方便夹紧一定厚度的图书,相邻两个第一隔板203之间的间距依据图书馆图书借阅厚度的大数据统计进行设计,便于存书空间得到充分利用。通过在弹性夹片2032的活动端设置微型滚珠2033,采用滚动代替滑动,可以减小存放不同厚度的图书时,弹性夹片2032与第一隔板203面板之间的摩擦。
61.优选地,所述可活动弹簧夹片选用弹簧钢材料,有一定的弹性性能且有较强的耐磨性。
62.优选地,所述第一搁板202采用abs塑料制成,因其具有成型加性好,强度高,轻便,表面硬度大,非常光滑,易清洁处理,尺寸稳定等优点。
63.优选地,所述第一隔板203采用pet塑料板材制成,因其具有成型加工性好,硬度大,摩擦系数高,尺寸稳定等优点。
64.具体地,如图9所示,所述机械手臂1包括手掌执行机构101、左手指执行机构102 和右手指执行机构103,所述左手指执行机构102和右手指执行机构103均呈e字形,且 e字形开口均朝外;这种形状的设计能确保机械手臂1有效地抓取图书,而且确保书籍书口位置不会出现张开的喇叭状;所述手掌执行机构101为框架结构,且框架的两侧壁之间设有横向的导杆1011,所述左手指执行机构102和右手指执行机构103上均设有导向孔,所述左手指执行机构102和右手指执行机构103均通过导向孔滑动安装在手掌执行机构 101的导杆1011上;所述左手指执行机构102、右手指执行机构103与手掌执行机构101 之间设有伸缩装置,所述伸缩装置用于驱动左手指执行机构102和右手指执行机构103在导杆1011上滑动。
65.进一步地,如图13所示,所述伸缩装置包括微型伸缩电机1013和伸缩杆1012,所述伸缩杆1012的两端分别与微型伸缩电机1013的输出端和左手指执行机构102或右手指执行机构103的内侧壁连接。通过同步驱动两个微型伸缩电机1013正转或反转,即可实现左手指执行机构102与右手指执行机构103的张开或合拢动作。
66.进一步地,如图11所示,所述左手手指执行机构的内侧面板上设有防滑垫片1023和片状压力传感器1022;所述防滑垫片1023用于增大摩擦力,防止书籍滑落;所述压力传感器1022用于检测手指执行机构与书籍之间的压力;所述防滑垫片1023和压力传感器 1022厚度相同,确保能增大摩擦力的同时也能准确测得手指执行机构与书籍之间的压力;
67.进一步地,如图12所示,所述右手手指执行机构的内侧面板上设有多个微型滚轮1031,所述微型滚珠2033一半嵌入面板内,一半高出面板;所述微型滚轮1031的滚动方向沿开口方向,便于书籍更好地从两手指执行机构间滑落到订单式储书柜6中,所述微型滚轮1031 采用表面有圈状纹路的钢材制成,使纹路顺着滚动方向,在垂直滚动方向即垂直纹路
方向有较大摩擦力,可以进一步防止书本掉落。
68.优选地,所述防滑垫片1023采用尼龙材料,因其具有材质柔软、摩擦力大的特性,可以对图书起到一定的保护作用。
69.具体地,如图2、图8所示,所述书籍存放装置2上还设有高精度定位装置201,所述高精度定位装置201包括a1级定位装置2011和b1级定位装置2012;所述a1级定位装置2011为多个方形定位条码,所述方形定位条码纵向安装在每层第一搁板202最右侧,用于定位书籍所在层数;所述b1级定位装置2012为多个四角激光发射装置,所述四角激光发射装置安装于第一搁板202的相邻两个第一隔板203正中间,用于目标书籍的精确定位;所述b1级定位装置2012的中部还设有用于显示动态二维码的信息存储模块301,所述动态二维码存储有书籍的名称、出版商、厚度信息以及书籍所对应的订单信息和书籍所在储书栏的两个第一隔板203之间的距离信息;如图13所示,所述手掌执行机构101的下侧设有四角激光接收装置1014,所述四角激光接收装置1014的中部设有扫描识别器 1015;所述四角激光接收装置1014与位置、尺寸与四角激光发射装置的位置、尺寸相配,所述扫描识别器1015在四角激光接收装置1014中的位置与动态二维码在b1级定位装置 2012中的位置对应。所述扫描识别器1015在取书过程中用于扫描书籍存放装置2中信息存储模块301显示的动态二维码,获取对应图书的名称、出版商、厚度信息,以及图书所对应的订单信息和图书所在储书栏的两储书隔板之间的距离信息;在存书过程中用于扫描订单式储书柜6对应的固定二维码,用于监测与更新该订单式储书柜6对应的订单完成情况。
70.进一步地,所述订单式储书柜6包括辅助定位装置601,所述辅助定位装置601包括 a2级定位装置6011、b2级定位装置6012和c级定位装置6013,用于自带定位式机械手臂1与智能借书柜的定位。所述a2级定位装置6011为多个方形定位条码,设在每个订单式储书柜6的右下方,用于自带定位式机械手臂1扫描从而找到对应的订单式储书柜6;所述b2级定位装置6012为四角激光发射装置,设在每个订单式储书柜6的右侧边栏(对应第二隔板603部分的中上部),所述b2级定位装置6012发射四束定位激光,与自带定位式机械手臂1上的四角激光接收装置1014相对应,实现自带定位式机械手臂1与订单式储书柜6的精准定位;所述c级定位装置6013为红外接收装置,安装在订单式储书柜6 的内部顶面;如图10所示,所述左手指执行机构102的外侧面板上设有与所述红外接收装置相匹配的红外发射装置1021,用于确定自带定位式机械手臂1在订单式储书柜6内部的定位。
71.具体地,所述订单式储书柜6还包括多个订单管理模块501,所述订单管理模块501 为多个固定二维码,所述固定二维码安装在b2级定位装置6012的中部;自带定位式机械手臂1扫描对应固定二维码后将图书信息录入订单管理模块501中该订单式储书柜6所对应的订单,用于监测更新订单完成情况。
72.进一步地,自带定位式机械手臂1手掌主体框架上的四角激光接收装置1014和扫描识别器1015的相对位置与b1级定位装置2012的激光发射装置和信息存储模块301的相对位置相一致,还与b2级定位装置6012的激光发射装置和订单管理模块501的相对位置相一致。
73.具体地,所述信息存储模块301与设备管理模块302相连,用于接收智能借书柜的使用信息,为订单匹配相应的订单式储书柜6,同时将图书相关信息和为订单匹配的对应的订单式储书柜6位置信息发送给设备管理模块302;所述信息存储模块301还与订单管理模
块501相连,用于调取订单信息将信息反馈给订单管理模块501,同时进行订单书籍的核对。
74.具体地,所述设备管理模块302还与智能借书车、智能借书柜和自带定位式的机械手臂1相连,用于发送任务指令给设备,同时接受设备的反馈信息,进行数据交互;所述设备管理模块302还与订单管理模块501相连,用于将从信息存储模块301获取的图书相关信息发送给订单管理模块501。
75.进一步地,所述自带定位式机械手臂1扫描订单管理模块501上的固定二维码,将图书信息录入订单管理模块501,订单管理模块501又与信息存储模块301相连,将获取的图书信息反馈给信息存储模块301,获取目标书籍所绑定的订单信息以及对应订单式储书柜6信息,进行信息核对,并实时监测更新定订单完成情况。
76.优选地,所述b1级定位装置2012和b2级定位装置6012的激光发射装置发射的激光频率各不相同且固定,所述四角激光接收装置1014在接收到激光照射后,可以检测激光的频率,当四角激光接收装置1014的四个激光接收器都接收到各自对应频率的激光信号后,对应定位完成。
77.进一步地,如图3、图14所示,所述柜体内部从上往下依次设有多层第二搁板602,相邻两第二搁板602之间的间距从上往下依次增大;所述间距依据图书馆单位订单借阅图书总厚度的统计数据来设计;所述第二搁板602的上表面为内低外高的倾斜面,倾斜角度为25度,确保存入图书时,图书落在订单式储书柜6中,防止书籍掉落;所述第二搁板 602的上表面设有消磁装置6021,用于对存入订单式储书柜6内的书籍进行扫描消磁;所述第二搁板602的下表面设有所述c级定位装置6013,用于接收机械手臂1上的红外发射装置1021发射的红外线,实现机械手臂1在订单式储书柜6内部的定位;所述柜体从左往右等间距安装有多个第二隔板603。
78.进一步地,所述订单式储书柜6还包括自动开关门604,当自带定位式机械手臂1通过a2级定位装置6011匹配到对应的订单式储书柜6时,自动开关门604打开,张开角度为90度;当该订单式储书柜6对应的订单已完成自带定位式机械手臂1回到零点位置时,自动开关门604关闭。
79.本实施例中,各级定位装置及硬件模块的安装方法为:
80.每相邻两第一隔板203之间的第一搁板202上布置一个信息存储模块301的动态二维码,调整各信息存储模块301的安装位置,使每个动态二维码均处于对应的两相邻第一隔板203之间的中点处,定位好后,通过螺钉将信息存储模块301固定在第一搁板202侧边;在每个信息存储模块301四角布置b1级定位装置2012的激光发射装置,在每层第一搁板 202最右侧粘贴一个定位条码;智能借书柜上每个订单式储书柜6的右侧第二隔板603上粘贴一个定位条码,调整位置使其在订单式储书柜6的右下方,在订单式储书柜6右侧第二隔板603上方对应布设固定二维码,调整固定二维码位置使其与订单式储书柜6顶部留有一定距离,在固定二维码四角布置b2级定位装置6012的激光发射装置。
81.实施例2
82.如图15所示,与上述实施例1中图书借阅装置匹配的,本实施例提供了一种基于订单式的图书馆图书借阅方法,按取书与存书整个流程依次包括:取书a1级定位方法、取书b1级定位方法、取书方法、存书a2级定位方法、存书b2级定位方法、存书c级定位方法和存书方法;
83.如图16所示,所述取书a1级定位方法为:机械手臂1由下往上依次扫描书籍存放装置2上a1级定位装置2011的方形定位条码,比对条码编号与目标书籍层号是否一致,若不一致,则机械手臂1上移40cm,再比对编号与层号是否一致;若一致,即确定目标书籍在书籍存放装置2中的层数;
84.所述取书b1级定位方法为:确定目标书籍的层数后,机械手臂1由右向左移动25mm,同时通过扫描识别器1015识别5cm视野范围内的动态二维码,将扫码获取的书籍信息与目标书籍信息进行比对,若比对信息不一致,则机械手臂1继续左移5cm,然后再继续比对;若比对信息一致,则b2级定位装置6012的四角发射四束激光,再通过调整机械手臂 1的空间状态直至机械手臂1上的四角激光接收装置1014均接收到对应的激光;
85.如图17所示,所述取书方法为:机械手臂1根据扫码获取的书籍厚度信息和对应储书栏的距离信息,控制两个手指执行机构张开,张开距离较目标书籍厚度大2mm;机械手臂1伸入储书栏内预设深度后,控制两个手指执行机构夹紧,检测压力传感器1022的压力值是否达到预设压力,若没有,则控制两手指执行机构向内夹紧1mm,直至左手指执行机构102上的片状压力传感器1022检测的压力值到达预设压力后,再控制机械手臂1抽出,并转至预定朝向;
86.如图18所示,所述存书a2级定位方法为:通过机械手臂1上的扫描识别器1015扫描订单式储书柜6上a2级定位装置6011的方形定位条码,将扫描获取的编号与目标订单式储书柜6的编号进行比对,并根据比对结果调整机械手臂1的位置;
87.所述定位条码设有编号“ab
‑
cd”,目标订单式储书柜6编号“ab
‑
cd”,“ab
‑
cd”与“ab
‑
cd”分别代表阿拉伯数字,如
“‘
03
‑
11’表示从右往左第三列,从下往上第11个订单式储书柜6”,比对定位条码上的编号与目标订单式储书柜6上的编号,先比对“ab”和“ab”,若“ab>ab”,机械手臂1右移40cm;若“ab<ab”,机械手臂1左移40cm;若“ab=ab”,则进行“cd”和“cd”的比对,若“cd>cd”,机械手臂1下移20cm,判断是否有条码,如果有就比对“cd”和“cd”,如果没有继续下移20cm;若“cd<cd”,机械手臂1上移20cm,判断是否有条码,如果有就比对“cd”和“cd”,如果没有继续上移 20cm,直至定位条码上的编号与目标订单式储书柜6的编号完全一致,即找到目标订单式储书柜6,a2级定位完成。
88.如图19所示,所述存书b2级定位方法为:比对编号信息一致后,b2级定位装置6012 的四角发射四束激光,机械手臂1顺时针转动90度,再通过调整机械手臂1的空间状态直至机械手臂1上的四角激光接收装置1014均接收到对应的激光;目标订单式储书柜6 对应的自动开关门604开启;
89.如图20所示,所述存书c级定位方法为:机械手臂1伸入目标订单式储书柜6预设深度,左手指执行机构102上的红外发射装置1021与订单式储书柜6内部顶面的红外接收装置进行匹配,检测订单式储书柜6内部顶面的三处红外接收装置是否接收到对应的红外线,若否,则机械手臂1在水平面内按“s”形轨迹运动,直到三处红外接收装置接收到对应的红外线;匹配成功后进行距离测定,检测红外发射装置1021与红外接收装置之间的距离是否达到预设距离,若否,则机械手臂1下移2mm,直到该间距达到预设距离。
90.如图21所示,所述存书方法为:机械手臂1朝下转动25度,张开手指执行机构,直至左手指执行机构102上的压力传感器1022数值为0;图书借助自身重力落入订单式储书柜6中,自片状压力传感器1022数值为0时计时,自带定位式机械手臂1停留3秒后抽出,8秒后自
动开关门604关闭,完成一本目标书籍的存取。
91.本实施例中,b1级定位方法和b2级定位方法中,调整机械手臂1的空间状态的具体方法为:检测机械手臂1上的四角激光接收装置1014是否接收到任一对应激光,若没有,则机械手臂1按“s”字迹轨道运动,直至接收到任一对应激光;再检测机械手臂1上的四角激光接收装置1014是否接收到四束对应激光,若否,则机械手臂1向左或向右旋转1 度,直至接收到四束对应激光。
92.优选地,所述图书借阅方法还包括动态零点确定方法,所述动态零点确定方法为:针对订单中除第一本目标书籍的其他目标书籍,按照动态零点抓取;当完成一本目标书籍的抓取存放操作后,若下一本目标书籍与上一本目标书籍在智能借书车的同一层,则机械手臂1按原路径返回,此时机械手臂1的归零点位为上一本目标书籍的位置;归零后自带定位式机械手臂1继续向左移动至下一本目标书籍重复抓取工作,并原路径返回至目标订单式储书柜6进行存放;若下一本目标书籍与上一本目标书籍不在智能借书车的同一层,则归零点位为下一本目标书籍所在层数的最右端所对应的a1级定位装置2011的位置处,自带定位式机械手臂1回到归零点位后重复存取工作直至该订单完成,机械抓手回到初始点位进行下一订单的抓取存放工作,如此反复取放书籍。
93.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。