1.本发明涉及安防技术领域,特别涉及一种远程门禁管理系统。
背景技术:
2.随着科技的不断发展,人们对于安保防护越来越重视,科技、制药公司等存在较多的商业机密,需要进行严加防护管控,在一些公司的楼宇中,除了配备安保人员外,基本都会启用门禁系统,不同的安保门需要不同的权限才能开启,以保证核心机密不会丢失。
3.为了进一步提高安保性能,一些科技公司中对涉及商业机密的工作人员进行了安保门权限的管理,设置了反潜回功能,即持卡人必须依照预先设定好的路线进出,否则下一安保门的刷卡无效,以此提高安保性能,然而在对持卡人的门禁卡进行授予权限时,往往需要持卡人以及具有权限的管理人员移动到每一道安保门处进行授限,授限的效率较慢,而且在授限的过程中,有可能会出现选择的安保门主体出错的情况,导致整个授限过程需要从头来过。
技术实现要素:
4.鉴以此,本发明提出一种远程门禁管理系统,构建楼层虚拟场景后,可以根据起始地和目的地规划行进路径,并对门禁卡进行行进路径上的安保门的依顺序授限,防止潜回,提高安保性能。
5.本发明的技术方案是这样实现的:
6.一种远程门禁管理系统,包括:
7.安保门采集单元,用于采集不同楼层中设置的安保门的位置信息;
8.虚拟场景构建单元,用于构建楼层的虚拟场景;
9.起终点选择单元,用于在虚拟场景中选择起始地以及目的地;
10.权限管理单元,用于对门禁卡按照顺序进行权限授予;
11.所述虚拟场景构建单元包括:
12.地图构建单元,用于根据楼层平面图构建楼层地图;
13.安保门映射单元,用于将安保门的位置信息映射到对应的楼层地图中;
14.路径规划单元,用于根据起始地和目的地规划行进路径;
15.可视交互单元,用于显示包含安保门位置和行进路径的楼层地图以及行进路径选择;
16.所述安保门映射单元分别与安保门采集单元以及地图构建单元数据连接,所述路径规划单元分别与起终点选择单元以及地图构建单元数据连接,所述可视交互单元与地图构建单元数据连接;
17.所述权限管理单元包括:
18.路径分析单元,用于对行进路径进行分析,识别行进路径中包含的安保门;
19.权限授予单元,用于根据选取的行进路径上的安保门顺序对门禁卡进行权限授
予;
20.所述路径分析单元分别与可视交互单元以及权限授予单元数据连接。
21.优选的,还包括楼层选择单元,所述楼层选择单元用于选择虚拟场景中的楼层地图,所述地图构建模块与楼层选择单元数据连接。
22.优选的,还包括权限检查单元,所述权限检查单元包括:
23.读取单元,用于读取门禁卡中含有的权限;
24.优先级划分单元,用于获取门禁卡权限中的优先级;
25.开启检测单元,用于根据门禁卡权限的优先级获得安保门的开启信息;
26.所述读取单元、优先级划分单元以及开启检测单元依次数据连接,所述开启检测单元将安保门的开启信息发送给地图构建单元,所述地图构建单元根据安保门的开启信息依次开启虚拟场景内的安保门。
27.优选的,还包括门禁机,所述门禁机设置在安保门一侧,用于控制安保门的开启与关闭,并将安保门的开关信息传输给地图构建单元,所述地图构建单元根据安保门的开关信息更新虚拟场景中安保门的开启状态。
28.优选的,还包括保密区设置单元,所述保密区设置单元发送保密区域到地图构建单元,所述地图构建单元对保密区域进行封锁,所述路径规划单元避开保密区域进行路径规划。
29.优选的,所述路径规划单元包括:
30.主体映射单元,用于将主体映射到楼层地图的起始地;
31.安保门暂开启单元,用于控制楼层地图中所有的安保门开启;,
32.移动单元,用于驱动主体从起始地经不同行进路径移动到目的地;
33.安保门数量计算单元,用于计算行进路径上经过的安保门数量;
34.路径选择单元,用于将最佳的行进路径输出到地图构建单元上;
35.所述地图构建单元分别与主体映射单元、安保门暂开启单元、移动单元、安保门数量计算单元以及路径选择单元数据连接,所述安保门数量计算单元与路径选择单元数据连接。
36.优选的,所述路径规划单元还包括路径距离计算单元,所述路径距离计算单元用于计算行进路径的距离,所述路径选择单元与路径距离计算单元数据连接。
37.优选的,所述路径选择单元包括加权计算单元以及输出单元,所述加权计算单元分别与输出单元、路径距离计算单元以及安保门数量计算单元数据连接,所述输出单元与地图构建单元数据连接。
38.优选的,所述安保门采集单元包括移动采集车、主控单元、干簧管以及磁铁,所述移动采集车设置在楼层天花板上方的夹层内,所述干簧管设置在移动采集车底部,所述磁铁设置在安保门的顶部,所述主控单元设置在移动采集车上,并分别与移动采集车以及干簧管电连接,所述安保门映射单元与主控单元数据连接,所述地图构建模块将楼层地图发送给主控单元,所述主控单元驱动移动采集车在夹层内由外侧至内侧进行周向移动。
39.优选的,所述安保门采集单元还包括中心柱以及定位机构,所述中心柱设置在楼层天花板上方的夹层内的中心位置,所述定位机构包括红外发射管和红外接收管,所述红外发射管设置在中心柱外壁上,所述红外接收管设置在移动采集车侧壁上,所述主控单元
与红外接收管电连接。
40.与现有技术相比,本发明的有益效果是:
41.本发明提供了一种远程门禁管理系统,应用于公司的商业机密防护中,通过对楼层的平面图以及安保门位置获取,构建出虚拟场景,在需要进行授限时,首先选取起始地和目的地,然后路径规划单元会根据起始地和目的地在虚拟场景中进行行进路径的规划,规划的行进路径可以由工作人员自行选取,在行进路径选择完毕后,可以将行进路径上的安保门权限按照行进顺序依次授予到门禁卡上,无需工作人员移动到各安保门处进行授限处理,可以提高权限授予的效率,同时可以一次性的进行反潜回设定,进一步提高安保性能。
附图说明
42.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的优选实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
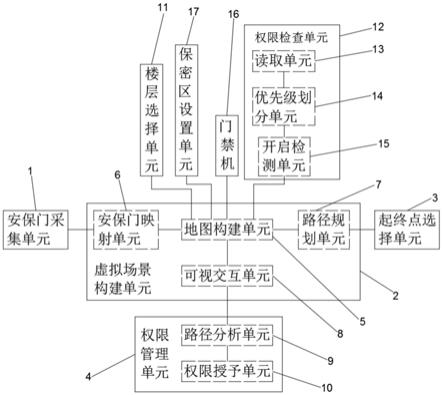
43.图1为本发明的一种远程门禁管理系统的原理图;
44.图2为本发明的一种远程门禁管理系统的路径规划单元与地图构建单元连接的原理图;
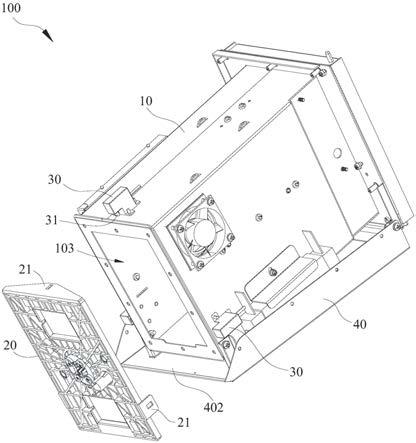
45.图3为本发明的一种远程门禁管理系统的安保采集单元的结构示意图;
46.图中,1为安保门采集单元,2为虚拟场景构建单元,3为起终点选择单元,4为权限管理单元,5为地图构建单元,6为安保门映射单元,7为路径规划单元,8为可视交互单元,9为路径分析单元,10为权限授予单元,11为楼层选择单元,12为权限检查单元,13为读取单元,14为优先级划分单元,15为开启检测单元,16为门禁机,17为保密区设置单元,18为主体映射单元,19为安保门暂开启单元,20为移动单元,21为安保门数量计算单元,22为路径选择单元,23为路径距离计算单元,24为加权计算单元,25为输出单元,26为移动采集车,27为主控单元,28为干簧管,29为中心柱,30为红外发射管,31为红外接收管。
具体实施方式
47.为了更好理解本发明技术内容,下面提供一具体实施例,并结合附图对本发明做进一步的说明。
48.参见图1至图3,本发明提供的一种远程门禁管理系统,包括:安保门采集单元1,用于采集不同楼层中设置的安保门的位置信息;虚拟场景构建单元2,用于构建楼层的虚拟场景;起终点选择单元3,用于在虚拟场景中选择起始地以及目的地;权限管理单元4,用于对门禁卡按照顺序进行权限授予;所述虚拟场景构建单元2包括:地图构建单元5,用于根据楼层平面图构建楼层地图;安保门映射单元6,用于将安保门的位置信息映射到对应的楼层地图中;路径规划单元7,用于根据起始地和目的地规划行进路径;可视交互单元8,用于显示包含安保门位置和行进路径的楼层地图以及行进路径选择;所述安保门映射单元6分别与安保门采集单元1以及地图构建单元5数据连接,所述路径规划单元7分别与起终点选择单元3以及地图构建单元5数据连接,所述可视交互单元8与地图构建单元5数据连接;所述权限管理单元4包括:路径分析单元9,用于对行进路径进行分析,识别行进路径中包含的安保
门;权限授予单元10,用于根据选取的行进路径上的安保门顺序对门禁卡进行权限授予;所述路径分析单元9分别与可视交互单元8以及权限授予单元10数据连接。
49.本发明的一种远程门禁管理系统,用于楼宇各楼层的安保门的管理,包括普通的对单扇安保门进行权限授予以及按照既定的路径进行反潜回的多扇安保门的权限授予,为了避免持卡人移动到各个安保门处进行权限的授予,本发明设置了虚拟场景构建单元2,将楼层的场景构建出来,其中,构建的场景内包含了楼层的平面图以及各安保门的具体位置,持卡人只需要在虚拟场景内选择需要授予权限的安保门即可,从而可以提高权限授予的效率,由于虚拟场景中需要明确安保门的具体位置,因此本发明通过设置的安保门采集单元1对安保门的具体位置进行采集,采集后的安保门位置信息通过安保门映射单元6映射到地图构建单元5所构建的楼层地图中,然后通过可视交互单元8进行显示,持卡人可以在可视交互单元8上进行操作以对门禁卡进行授限。
50.在进行待授限安保门的选取时,首先由持卡人通过起终点选择单元3选择对应楼层内的起始地和目的地,然后路径规划单元7会根据起始地和目的地在楼层地图中规划所有可以到达的行进路径,所规划的行进路径会通过可视交互单元8进行显示,持卡人通过可视交互单元8确认一条行进路径后,路径分析单元9会对选取的行进路径进行分析,识别该行进路径中包含的安保门及其顺序,然后权限授予单元10可以根据该行进路径上的安保门顺序对门禁卡进行权限授予,若安保门的数量为两个以上,则所依据的顺序则为持卡人需要开启安保门的顺序,从而可以实现反潜回功能,最大化的保护商业机密。
51.对于虚拟场景构建单元2、起终点选择单元3而言,可以以带有触摸屏或键盘输入的上位机为载体,可视交互单元8可以选用触摸屏,在展示构建的虚拟楼层地图的同时,还可以供持卡人进行行进路径的选择,起终点选择单元3则可以通过可输入键盘来实现,持卡人在键盘上输入自己的起始地和目的地后,路径规划单元7可以进行行进路径的规划,对于权限授予单元10而言,其可以选择为门禁卡复制机,权限授予单元10接收路径分析单元9发送的带有顺序的安保门信息后,可以依次对门禁卡进行含有优先级的授限。
52.优选的,还包括楼层选择单元11,所述楼层选择单元11用于选择虚拟场景中的楼层地图,所述地图构建模块与楼层选择单元11数据连接。
53.通过所设置的楼层选择单元11可以切换在可视交互单元8上显示的楼层地图,从而可以授予不同楼层的安保门的权限。
54.优选的,还包括权限检查单元12,所述权限检查单元12包括:读取单元13,用于读取门禁卡中含有的权限;优先级划分单元14,用于获取门禁卡权限中的优先级;开启检测单元15,用于根据门禁卡权限的优先级获得安保门的开启信息;所述读取单元13、优先级划分单元14以及开启检测单元15依次数据连接,所述开启检测单元15将安保门的开启信息发送给地图构建单元5,所述地图构建单元5根据安保门的开启信息依次开启虚拟场景内的安保门。
55.在对门禁卡进行权限授予后,一般情况下持卡人需要到安保门处进行测试,而本发明通过设置的权限检查单元12可以在权限授予后直接对门禁卡的开启功能进行测试,将门禁卡置于读取单元13一侧后,读取单元13读取门禁卡中含有的安保门权限,并传输给优先级划分单元14,优先级划分单元14获取安保门权限中的优先级后传输给开启检测单元15,开启检测单元15将安保门的开启信息传输到地图构建模块中,地图构建模块可以按照
安保门开启信息依次的开启对应的安保门,安保门的开启过程会实时显示在可视交互单元8上,从而持卡人可以在可视交互单元8上查看安保门的开启是否正确。
56.优选的,还包括门禁机16,所述门禁机16设置在安保门一侧,用于控制安保门的开启与关闭,并将安保门的开关信息传输给地图构建单元5,所述地图构建单元5根据安保门的开关信息更新虚拟场景中安保门的开启状态。
57.所设置的门禁机16不仅可以供门禁卡进行刷卡,还可以采集安保门的开启和关闭状态,并将安保门的状态信息传输给地图构建单元5,地图构建单元5可以实时更新安保门的开启状态,并在可视交互单元8中进行显示,从而可以实现对各安保门的实时监控功能。
58.优选的,还包括保密区设置单元17,所述保密区设置单元17发送保密区域到地图构建单元5,所述地图构建单元5对保密区域进行封锁,所述路径规划单元7避开保密区域进行路径规划。
59.为进一步提高安保性能,还设置了保密区设置单元17,由管理人员统一进行保密区的设置,对于保密区域,地图构建单元5会进行封锁,从而在路径规划单元7进行行进路径规划时,会避开保密区域,避免无关人员接近到机密材料。
60.优选的,所述路径规划单元7包括:主体映射单元18,用于将主体映射到楼层地图的起始地;安保门暂开启单元19,用于控制楼层地图中所有的安保门开启;,移动单元20,用于驱动主体从起始地经不同行进路径移动到目的地;安保门数量计算单元21,用于计算行进路径上经过的安保门数量;路径选择单元22,用于将最佳的行进路径输出到地图构建单元5上;所述地图构建单元5分别与主体映射单元18、安保门暂开启单元19、移动单元20、安保门数量计算单元21以及路径选择单元22数据连接,所述安保门数量计算单元21与路径选择单元22数据连接。
61.在获取起始地和目的地后,通过设置的主体映射单元18在虚拟的楼层地图中映射一个主体,并使该主体位于起始地,然后安保门暂开启单元19将该楼层中所有的安保门开启后,移动单元20驱动主体在楼层内向目的地移动,由于所有的安保门均已开启,因此主体移动时会产生多条行进路径,同时在行进的过程中,所设置的安保门数量计算单元21会统计每一条行进路径上的安保门数量,路径选择单元22会根据安保门数量选取数量最少的一条行进路径推荐给持卡人,持卡人可以选择该行进路径为最优行进路径,也可以通过可视交互单元8自行选择行进路径。
62.优选的,所述路径规划单元7还包括路径距离计算单元23,所述路径距离计算单元23用于计算行进路径的距离,所述路径选择单元22与路径距离计算单元23数据连接。
63.行进路径的选择除了考虑安保门的数量以外,还会考虑路径的距离,通过设置的路径距离计算单元23可以与安保门数量计算单元21进行综合比较,从而选取最优行进路径。
64.优选的,所述路径选择单元22包括加权计算单元24以及输出单元25,所述加权计算单元24分别与输出单元25、路径距离计算单元23以及安保门数量计算单元21数据连接,所述输出单元25与地图构建单元5数据连接。
65.由于路径距离计算单元23和安保门数量计算单元21所获得的是精确数值,且不同行进路径上安保门的数量以及路径距离可能会存在较小的差异,因此本发明采用加权计算方式获取最终单一的数值来选取最优行进路径,通过对路径距离和安保门数量分别进行加
权后得到最优值,对比每条行进路径的最优值,选取最优值最小的行进路径输出到输出单元25中,由输出单元25将最优行进路径发送给地图构建单元5中,地图构建单元5将最优行进路径显示在可视交互单元8中。
66.优选的,所述安保门采集单元1包括移动采集车26、主控单元27、干簧管28以及磁铁(图中未示出),所述移动采集车26设置在楼层天花板上方的夹层内,所述干簧管28设置在移动采集车26底部,所述磁铁设置在安保门的顶部,所述主控单元27设置在移动采集车26上,并分别与移动采集车26以及干簧管28电连接,所述安保门映射单元6与主控单元27数据连接,所述地图构建模块将楼层地图发送给主控单元27,所述主控单元27驱动移动采集车26在夹层内由外侧至内侧进行周向移动。
67.对于安保门采集单元1而言,其包括设置在楼层天花板上方的夹层内的移动采集车26,移动采集车26可以在夹层内由外至内进行周向运动,从而最终移动采集车26可以移动到夹层的中心点,实现对整个天花板上方区域的覆盖采集,在移动采集车26的底部设置了干簧管28,同时在每一个安保门的顶部设置了磁铁,当移动采集车26移动到安保门的上方时,干簧管28被磁铁触发,此时主控单元27会接收到干簧管28的信息,主控单元27记录此时移动采集车26的位置后即可实现对安保门位置的定位。
68.优选的,所述安保门采集单元1还包括中心柱29以及定位机构,所述中心柱29设置在楼层天花板上方的夹层内的中心位置,所述定位机构包括红外发射管30和红外接收管31,所述红外发射管30设置在中心柱29外壁上,所述红外接收管31设置在移动采集车26侧壁上,所述主控单元27与红外接收管31电连接。
69.移动采集车26在移动一周后,红外发射管30会与红外接收管31相对,此时红外接收管31接收到红外发射管30发出的红外光后,会产生电信号,并发送给主控单元27,主控单元27驱动移动采集车26向中心柱29方向移动一个身位后继续进行周向运动,直至对整个天花板上方的区域进行全部覆盖。
70.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。