1.本实用新型涉及身份安检领域,具体是集指静脉、指纹与人脸生物特征影像于一体的身份安检装备。
背景技术:
2.指静脉识别是静脉识别的一种,首先通过指静脉识别仪取得个人手指静脉分布图,从手指静脉分布图依据专用比对算法提取特征值,通过近红外光线照射,利用ccd摄像头获取手指静脉的图像,将手指静脉的数字图像存贮在计算机系统中,将特征值存储。实际上它和初代指纹识别的方式比较接近,依靠的是图像特征比对来进行认证和识别,指纹是人类手指末端指腹上由凹凸的皮肤所形成的纹路,指纹能使手在接触物件时增加摩擦力,从而更容易发力及抓紧物件,它是人类进化过程中自然形成的。人脸生物特征影像即为基于人的面部特征信息进行身份识别的一种生物识别技术。使用3d摄像头或者摄像机采集含有人脸的图像或视频,自动检测图像信息和跟踪人脸,对检测到的人脸进行脸部的一系列相关分析技术。
3.在现有的日常生活中通常只对指静脉、指纹与人脸生物特征影像其中的一种进行采集验证身份,存在身份验证不准确的问题,因此提出一种集指静脉、指纹与人脸生物特征影像于一体的身份安检装备,对指静脉、指纹与人脸生物特征影像共同进行检测,从而使得身份的检验更加准确。
技术实现要素:
4.本实用新型的目的在于提供一种集指静脉、指纹与人脸生物特征影像于一体的身份安检装备,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种集指静脉、指纹与人脸生物特征影像于一体的身份安检装备,包括机箱,所述机箱内竖直固定连接有用于将机箱分隔长前机室和后机室的分隔板,机箱的前端设有前箱壁,前箱壁的中心开设有圆形穿孔,前箱壁内表面靠近圆形穿孔外侧处开设有径向截面呈阶梯状的环形凹陷面,机箱的后端设有后端开口,后端开口的内侧通过螺栓固定安装后箱壁,机箱的前侧顶部开设有固定通孔,固定通孔开设在前箱壁上,固定通孔内设固设有人体红外传感器,人体红外传感器与固定通孔密封配合,人体红外传感器的探头露出前箱壁,前机室内设有桶状旋转体,桶状旋转体包括有旋转筒体和旋转后端板,旋转后端板外表面固定连接有传动轴前端,传动轴与旋转后端板同心设置,传动轴的后端贯穿分隔板且插入后机室内,分隔板上开设有与传动轴转动连接有贯穿式轴孔,后机室内设有小型直流减速旋转电动机,小型直流减速旋转电动机与分隔板固定连接,小型直流减速旋转电动机的输出轴通过联轴器与传动轴固定连接,传动轴设与前机室端的外侧套设有导电滑环,导电滑环包括有固定杆、滑环外圈和滑环内圈,旋转筒体的前端筒口环形端面开设有环形凹槽,环形凹槽内固定安装有与其相适配的密封圈,旋转筒体靠近圆形穿孔的前部筒壁对称开设有第
一安装通孔和第二安装通孔,第一安装通孔和第二安装通孔始终在同一直线上,第一安装通孔的内固定安装有与其相适配的槽盒,槽盒与第一安装通孔相互密封,槽盒的槽口朝向旋转筒体内设置,槽盒内朝向旋转筒体内的方向依次设有微型压力传感器和指纹采集器,微型压力传感器设在指纹采集器和槽盒的槽底之间,指纹采集器底面与微型压力传感器相互面接触,第二安装通孔内侧固定连接有机盒,机盒与第二安装通孔相互密封,机盒的盒口朝向旋转筒体内设置,在机盒的盒口固定安装有红外低通滤波片,红外低通滤波片与机盒相互密封,机盒内固定安装有微距红外摄像机,机盒的周壁与底壁均布开设有通气孔,通气孔用于机盒内部与前机室连通,旋转筒体外侧依次套有两个轴承,轴承包括有轴承内圈、轴承外圈和第一支撑架,轴承之间设有固定环,固定环套在旋转筒体的外侧,固定环的外表面固定连接有第二支撑架,第二支撑架的外侧与机箱的内壁固定连接,固定环的内侧内侧设有电磁感应作用器件,电磁感应作用器件包括有磁敏传感器、第一圆柱状钕铁硼永磁铁块和绝缘漆包导电线圈,第一圆柱状钕铁硼永磁铁块的外侧设有第二圆柱状钕铁硼永磁铁块,第二圆柱状钕铁硼永磁铁块与旋转筒体外表面固定连接,旋转筒体内表面位于第一安装通孔和第二安装通孔之间的圆柱面状部分相对旋转筒体中心轴线对称设置有呈弧面状的凹陷型灯槽,凹陷型灯槽内均布固定安装有近红外led灯和紫外led灯,近红外led灯和紫外led灯沿旋转筒体的周向和轴向均间隔交替布设,凹陷型灯槽的槽口处固定安装有与其相适配的弧面状透明石英玻璃罩,弧面状透明石英玻璃罩与凹陷型灯槽相互密封,机箱的外壁固定安装有4k高清摄像头。
7.作为本实用新型进一步的方案:所述固定杆圆周设置在滑环外圈的外侧,固定杆的一端与滑环外圈的外壁固定连接,固定杆的另一端与机箱的内壁固定连接,滑环外圈转动套设在滑环内圈的外侧,滑环内圈固定套设在传动轴的外侧。
8.作为本实用新型再进一步的方案:所述旋转筒体的前端筒口环形端面与环形凹陷面旋转滑动配合,密封圈与环形凹陷面旋转动密封配合。
9.作为本实用新型再进一步的方案:所述第一圆柱状钕铁硼永磁铁块与固定环的内表面固定连接,磁敏传感器对称设在第一圆柱状钕铁硼永磁铁块的两侧,且磁敏传感器与固定环的内表面固定连接,绝缘漆包导电线圈固定套设在第一圆柱状钕铁硼永磁铁块的外侧。
10.作为本实用新型再进一步的方案:所述轴承内圈固定套设在旋转筒体的外侧,轴承外圈转动套设在轴承内圈的外侧,第一支撑架的内壁与轴承外圈的外壁固定连接,第一支撑架的外壁与机箱的内壁固定连接。
11.作为本实用新型再进一步的方案:所述微距红外摄像机镜头的光轴沿旋转筒体径向延伸设置,指纹采集器和微距红外摄像机也始终设在同一直线上,第二圆柱状钕铁硼永磁铁块与指纹采集器和微距红外摄像机之间相对旋转筒体中心轴线为中心的圆周方向角度为90
°
,第一安装通孔和第二安装通孔之间相对旋转筒体中心轴线为中心的圆周方向角度为180
°
。
12.作为本实用新型再进一步的方案:所述所述旋转后端板为圆形,旋转后端板固定连接在旋转筒体的后端筒口且相互密封。
13.与现有技术相比,本实用新型的有益效果是:
14.本实用新型通过人体红外传感器、机箱、槽盒、微型压力传感器、指纹采集器、轴
承、轴承外圈、固定环、桶状旋转体、分隔板、固定杆、导电滑环、前箱壁、密封圈、红外低通滤波片、通气孔、微距红外摄像机、机盒、前机室、传动轴、贯穿式轴孔、后机室、第二安装通孔、绝缘漆包导电线圈、第一圆柱状钕铁硼永磁铁块、第二圆柱状钕铁硼永磁铁块、近红外led灯、紫外led灯、弧面状透明石英玻璃罩、环形凹槽、环形凹陷面、第一安装通孔、后箱壁、后端开口、小型直流减速旋转电动机、电磁感应作用器件、4k高清摄像头、凹陷型灯槽、圆形穿孔、固定通孔、旋转筒体、旋转后端板、滑环外圈、滑环内圈、第一支撑架、第二支撑架、轴承内圈和磁敏传感器之间的配合使用,使得通过安检设备可以方便对指静脉、指纹与人脸生物特征影像进行一体化采集验证,使得身份的验证更加方便,同时在不使用时可以通过紫外led灯对检测区域进行杀菌消毒,使得身份安检装置的使用更加安全。
附图说明
15.图1为集指静脉、指纹与人脸生物特征影像于一体的身份安检装备的纵向剖视结构示意图。
16.图2为集指静脉、指纹与人脸生物特征影像于一体的身份安检装备的第一局部横向剖视结构示意图。
17.图3为集指静脉、指纹与人脸生物特征影像于一体的身份安检装备的第二局部横向剖视结构示意图。
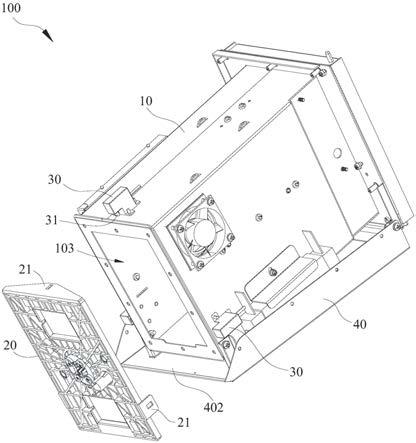
18.图4为集指静脉、指纹与人脸生物特征影像于一体的身份安检装备中a的放大图。
19.图5为集指静脉、指纹与人脸生物特征影像于一体的身份安检装备中圆柱状钕铁硼永磁铁块和绝缘漆包导电线圈的装配放大结构示意图。
20.图6为集指静脉、指纹与人脸生物特征影像于一体的身份安检装备的部分电路硬件连接关系原理框图(注意:单片机还通过第三至第十驱动电路芯片匹配对应有线电连接第三至第十固态继电器各自的输入控制端,仅示出单片机通过间隔出现弧线的线路连接第一和第二驱动电路芯片各自的输入控制端,实线间隔出现弧线表示其与其它线路不相连接,其它连接连接单片机和相应的驱动线路芯片的线路在本图中因连接线过多而未示出)。
21.图中:1人体红外传感器、2机箱、3槽盒、4微型压力传感器、5指纹采集器、6轴承、7轴承外圈、8固定环、9桶状旋转体、10分隔板、11固定杆、12导电滑环、13前箱壁、14密封圈、15红外低通滤波片、16通气孔、17微距红外摄像机、18机盒、19前机室、20传动轴、21贯穿式轴孔、22后机室、23第二安装通孔、24绝缘漆包导电线圈、25第一圆柱状钕铁硼永磁铁块、26第二圆柱状钕铁硼永磁铁块、27近红外led灯、28紫外led灯、29弧面状透明石英玻璃罩、30环形凹槽、31环形凹陷面、32第一安装通孔、33后箱壁、34后端开口、35小型直流减速旋转电动机、36电磁感应作用器件、374k高清摄像头、38凹陷型灯槽、39圆形穿孔、40固定通孔、41旋转筒体、42旋转后端板、43滑环外圈、44滑环内圈、45第一支撑架、46第二支撑架、47轴承内圈、48磁敏传感器。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下
所获得的所有其他实施例,都属于本实用新型保护的范围。
23.请参阅图1~6,本实用新型实施例中,一种集指静脉、指纹与人脸生物特征影像于一体的身份安检装备,包括机箱2,机箱2内竖直固定连接有用于将机箱2分隔长前机室19和后机室22的分隔板10,机箱2的前端设有前箱壁13,前箱壁13的中心开设有圆形穿孔39,前箱壁13内表面靠近圆形穿孔39外侧处开设有径向截面呈阶梯状的环形凹陷面31,机箱2的后端设有后端开口34,后端开口34的内侧通过螺栓固定安装后箱壁33,机箱2的前侧顶部开设有固定通孔40,固定通孔40开设在前箱壁13上,固定通孔40内设固设有人体红外传感器1,人体红外传感器1由日本panasonic松下公司生产市售且型号为ekmc1601111,或由德国海曼heimann生产市售且型号为lhi778、lhi878、lhi968或lhi874,人体红外传感器1与固定通孔40密封配合,人体红外传感器1的探头露出前箱壁13,前机室内设有桶状旋转体9,桶状旋转体9包括有旋转筒体41和旋转后端板42,旋转后端板42外表面固定连接有传动轴20前端,传动轴20与旋转后端板42同心设置,传动轴20的后端贯穿分隔板10且插入后机室22内,分隔板10上开设有与传动轴20转动连接有贯穿式轴孔21,后机室22内设有小型直流减速旋转电动机35,小型直流减速旋转电动机35由深圳市兆威机电股份有限公司生产市售且型号为zwbpd016016
‑
64
‑
01,供电电压5v,或由深圳市通瑞电机有限公司生产市售且型号为trm16p系列,供电电压9v\12v\18v,小型直流减速旋转电动机35与分隔板10固定连接,小型直流减速旋转电动机35的输出轴通过联轴器与传动轴20固定连接,传动轴20设与前机室19端的外侧套设有导电滑环12,导电滑环又名集电环、旋转关节、集流环或电滑环,具体为过孔式导电滑环、通孔式导电滑环或空心轴式导电滑环,由深圳市默孚龙科技有限公司生产市售且型号为mt2069系列,或由深圳市默孚龙科技有限公司生产市售且型号为mt025,导电滑环12包括有固定杆11、滑环外圈43和滑环内圈44,旋转筒体41的前端筒口环形端面开设有环形凹槽30,环形凹槽30内固定安装有与其相适配的密封圈14,旋转筒体41靠近圆形穿孔39的前部筒壁对称开设有第一安装通孔32和第二安装通孔23,第一安装通孔32和第二安装通孔23始终在同一直线上,第一安装通孔32的内固定安装有与其相适配的槽盒3,槽盒3与第一安装通孔32相互密封,槽盒3的槽口朝向旋转筒体41内设置,槽盒3内朝向旋转筒体41内的方向依次设有微型压力传感器4和指纹采集器5,微型压力传感器4又名薄膜压力传感器,由美国interli公司生产市售且型号为fsr406, 作用力范围0.2n
‑
20n,指纹采集器5由杭州城章科技有限公司生产市售且型号为fpc1020am,供电电压4.2
‑‑
6.0v,或由杭州城章科技有限公司生产市售且型号为r502a,供电电压3.3v,微型压力传感器4设在指纹采集器5和槽盒3的槽底之间,指纹采集器5底面与微型压力传感器4相互面接触,第二安装通孔23内侧固定连接有机盒18,机盒18与第二安装通孔23相互密封,机盒18的盒口朝向旋转筒体41内设置,在机盒18的盒口固定安装有红外低通滤波片15,红外低通滤波片15与机盒18相互密封,机盒18内固定安装有微距红外摄像机17,微距红外摄像头17由深圳市金乾象科技有限公司生产市售且型号为静脉检测摄像头,或由美国omnivision公司生产市售且且型号为ov7411p,或由日本takex公司生产市售且型号nc300air,或为由其它现有镜头,例如由福禄克(fluke)公司生产市售的红外微距镜头,机盒18的周壁与底壁均布开设有通气孔16,通气孔16用于机盒18内部与前机室19连通,使气流经通气孔16在前机室19与机盒18之间流动,有利于将微距红外摄像机17加电工作时释放的热量及时带出至机盒18之外,旋转筒体41外侧依次套有两个轴承6,轴承6包括有轴承内圈47、轴承外圈7和第一支撑架45,轴承6之
间设有固定环8,固定环8套在旋转筒体41的外侧,固定环8的外表面固定连接有第二支撑架46,第二支撑架46的外侧与机箱2的内壁固定连接,固定环8的内侧内侧设有电磁感应作用器件36,电磁感应作用器件36包括有磁敏传感器48、第一圆柱状钕铁硼永磁铁块25和绝缘漆包导电线圈24,磁敏传感器48又名电磁传感器,由美国diodesgo公司生产市售且型号为ah49fdntr
‑
g1,工作电压8
‑
3v,输出电压2.5v,或由德国bosch公司生产市售且型号为bmm150,工作电压3.6
‑
1.62v,或由美国德州仪器公司生产市售且型号为ah49fdntr
‑
g1,工作电压38
‑
2.5v,输出电压1.02v,第一圆柱状钕铁硼永磁铁块25的外侧设有第二圆柱状钕铁硼永磁铁块26,第二圆柱状钕铁硼永磁铁块26与旋转筒体41外表面固定连接,每个第二圆柱状钕铁硼永磁铁块26分别和每组电磁感应作用器件36中的第一圆柱状钕铁硼永磁铁块25、绝缘漆包导电线圈24相互磁力作用配合,每对磁敏传感器48被动磁感应配合第二圆柱状钕铁硼永磁铁块26,旋转筒体41内表面位于第一安装通孔32和第二安装通孔23之间的圆柱面状部分相对旋转筒体41中心轴线对称设置有呈弧面状的凹陷型灯槽38,凹陷型灯槽38内均布固定安装有近红外led灯27和紫外led灯28,近红外led灯27由德国欧司朗公司生产市售且型号为sfh 4715as,波段范围845
‑
855nm,供电电压3.2 v,或由日本epitex公司生产市售且型号为l850
‑
04up,发射出的近红外光中心波长为850nm,正常供电电压1.8v,或由深圳市亮宇浩光电有限公司生产市售且型号5050,供电电压1.5
‑
1.6v,波长范围850
‑
940nm,紫外led灯28由青岛杰生电气有限公司或由德国uv photonics公司生产市售的uv led紫外线消毒灯,青岛杰生电气有限公司生产的uv led紫外线消毒灯发出的不可见紫外光的波长为260
‑
275 nm,德国uv photonics公司生产的uv led紫外线消毒灯发出的不可见紫外光的波长为230
‑
330nm且可被定制为254nm或265nm,供电电压<5v,近红外led灯27和紫外led灯28沿旋转筒体41的周向和轴向均间隔交替布设,凹陷型灯槽38的槽口处固定安装有与其相适配的弧面状透明石英玻璃罩29,弧面状透明石英玻璃罩29与凹陷型灯槽38相互密封,机箱2的外壁固定安装有4k高清摄像头37,4k超清摄像头37由深圳市佳度科技有限公司生产市售且型号为jd
‑
ar0230
‑
v2。
24.固定杆11圆周设置在滑环外圈43的外侧,固定杆11的一端与滑环外圈43的外壁固定连接,固定杆11的另一端与机箱2的内壁固定连接,滑环外圈43转动套设在滑环内圈44的外侧,滑环内圈44固定套设在传动轴20的外侧。
25.旋转筒体41的前端筒口环形端面与环形凹陷面31旋转滑动配合,密封圈14与环形凹陷面31旋转动密封配合。
26.第一圆柱状钕铁硼永磁铁块25与固定环8的内表面固定连接,磁敏传感器48对称设在第一圆柱状钕铁硼永磁铁块25的两侧,且磁敏传感器48与固定环8的内表面固定连接,绝缘漆包导电线圈24固定套设在第一圆柱状钕铁硼永磁铁块25的外侧。
27.轴承内圈47固定套设在旋转筒体41的外侧,轴承外圈7转动套设在轴承内圈47的外侧,第一支撑架45的内壁与轴承外圈7的外壁固定连接,第一支撑架45的外壁与机箱2的内壁固定连接。
28.微距红外摄像机17镜头的光轴沿旋转筒体41径向延伸设置,指纹采集器5和微距红外摄像机17也始终设在同一直线上,第二圆柱状钕铁硼永磁铁块26与指纹采集器5和微距红外摄像机17之间相对旋转筒体41中心轴线为中心的圆周方向角度为90
°
,第一安装通孔32和第二安装通孔23之间相对旋转筒体41中心轴线为中心的圆周方向角度为180
°
。
29.所述旋转后端板42为圆形,旋转后端板42固定连接在旋转筒体41的后端筒口且相互密封。
30.后机室22内设有电源适配器、稳压集成电路芯片、单片机、固态继电器和驱动电路芯片,电源适配器、驱动电路芯片、固态继电器、稳压集成电路芯片、rs232接口芯片等,单片机又名微处理器,由韩国samsung集团生产市售且型号为cortex
‑
a9系列,r232接口芯片深圳市微雪电子有限公司生产市售且型号为rs232,第一稳压集成电路芯片至第十二稳压集成电路芯片又名三端稳压器,由美国德州仪器公司生产市售且型号为lm317lz/nopb,最大输入电压40v,输出电压1.2v
‑
37v,第一驱动电路芯片至第十驱动电路芯片由深圳市兴凯翔科技有限公司生产市售且型号为mc1413bdr2g或由美国德州仪器公司生产市售且型号为uln2003a,第一固态继电器只第十固态继电器即直流控直流固态继电器,由英国库顿kudom公司生产市售且型号为ksj100d100
‑
l,电源适配器由深圳市伟达源科技有限公司生产市售且型号为wdy
‑
24001000,输出电压24v。
31.本实用新型提供为计算机进行指生物影像特征识别提供了前置硬件基础,必须和计算机、图像显示器、扬声器等信息输出设备配合使用,计算机连接图像显示器、传声器(喇叭)等信息输出设备,电源适配器通过固态继电器、稳压集成电路芯片给图像显示器、扬声器、存储硬盘或flash存储器等供电,单片机采用usb3.0接口有线匹配连接计算机。
32.驱动电路芯片实际上就是把单片机发出的微弱低压直流电进行适量升压后发送给固态继电器,只有单片机不发出直流电给固态继电器则无法驱动固态继电器的输入被控制端导通,即固态继电器的输入被控制端始终处于断开状态,足量的电压可驱动固态继电器的输入控制端控制固态继电器的输出被控制端导通,当固态继电器的输入控制端导通时,电源适配器方能通过固态继电器的输入控制端、相应的稳压集成电路芯片给本专利中的微型压力传感器4、微距红外摄像机17、绝缘漆包导电线圈24、指纹采集器5、小型直流减速旋转电动机35、近红外led灯27等有源电子器件提供电压适合的稳定的直流电,集成稳压电路芯片的作用就是将电源适配器输出的直流电定量稳定安全输送给各个有源电子器件,使有源电子器件在稳定电压之下工作;rs232接口芯片可将4k超清摄像头37的视频数据信号按照rs
‑
232串行通信原理通过串行通信转换处理后发给单片机处理,现有导电滑环12是一种可旋转的特殊型连接器,是专门为旋转体有线输送电能与电信号的特殊型连接器。它由旋转体与静止体两部分组成,旋转部分连接使用设备的旋转结构并随之运转,称为转子(空心轴式导电滑环12的转子俗称内圈),静止部分连接设备固定的结构,称为定子(空心轴式导电滑环12的定子俗称外圈)。导电滑环12的作用属于机电技术领域经常采用的电流输送器件,它的作用为:能实现固定器部件(定子)与可相对固定器部件360
°
无限旋转的自转器部件(转子)之间的输电导线电流传递,以避免输电导线缠绕。空心轴式导电滑环总体呈筒状或环状,故其旋转体为内圈,其静止体即为其外圈,内圈固定套装在相对固定设备自转的旋转轴上,外圈在固定在固定设备上。
33.第一稳压集成电路芯片的电源输出端通过导电滑环12对应有线电连接微型压力传感器4,第二稳压集成电路芯片的电源输出端通过导电滑环12对应有线电连接微距红外摄像机17,第三稳压集成电路芯片的电源输出端通过导电滑环12对应有线电连接绝缘漆包导电线圈24,第四稳压集成电路芯片的电源输出端通过导电滑环12对应有线电连接指纹采集器5。
34.本实用新型的工作原理是:
35.由于电源适配器始终通过稳压集成电路芯片直接给人体红外传感器1供电,所以,人体红外传感器1始终处于加电检测模式,而且,旋转筒体41自然处于停转的静止状态,指纹采集器5可以位于微距红外摄像机17正上方,也可以位于其正下方,指纹采集器5的采集表面相应朝向正下方或正上方,这取决于在单片机设定,尽管旋转筒体41即旋转筒体41上安装的器件(包括微距红外摄像机17、指纹采集器5等)的总体重心在机盒18内,指纹采集器5置于微距红外摄像机17正上方作为默认设置是优选,但为了使微型压力传感器4优先发挥其作用,本实用新型的单片机默认设定在绝缘漆包导电线圈24因没有电流加载时指纹采集器5保持在微距红外摄像机17正下方,第一圆柱状钕铁硼永磁铁块25和第二圆柱状钕铁硼永磁铁块26因相对彼此的端头磁极相异,继而通过永磁力相互吸引作用,以至于彼此之间的间隙距离达到最小程度,并在无外力介入的情况下通过永磁力达到了保持旋转筒体41稳定静止而不转动的状态;在无人走近本实用新型时,人体红外传感器1则不会感测到人体发散出的红外线,单片机则在未收到人体红外传感器1发出的响应信号的状态中周期性地通过第十驱动电路芯片控制第十固态继电器的输出被控制端保持导通状态,继而使电源适配器的驱动电流通过第十固态继电器的输出被控制端、第十稳压集成电路芯片控制紫外led灯28供电,紫外led灯28从凹陷型灯槽38内朝着旋转筒体41的内表面(包括指纹采集器5和红外低通滤波片15的外表面)持续发出短波紫外线,短波紫外线可透过弧面状透明石英玻璃罩29对旋转筒体41内的红外低通滤波片15与指纹采集器5的外表面进行紫外线辐照辐照消毒,但除此之外,单片机不会被人体红外传感器1触发,也就不会通过相应的驱动电路芯片、固态继电器和稳压集成电路芯片启动内装在机箱2内的其它用电器件加电工作,电源适配器相应无法通过导电滑环12给配装在旋转筒体上内的微型压力传感器4、微距红外摄像机17、绝缘漆包导电线圈24和指纹采集器5有线供电,微型压力传感器4、微距红外摄像机17、绝缘漆包导电线圈24和指纹采集器5自然响应并且通过导电滑环12有线单向通信单片机,此时,本实用新型主体就处于节能省电模式,若有人走近本实用新型时,人体红外传感器1受人体红外线的激励而响应,单片机根据人体红外传感器1发出的响应电信号,立即控制第十固态继电器的输出被控制端断开,紫外led灯28掉电而停止发光,防止接近本实用新型的人手指误伸至旋转筒体41内被紫外线照射,避免伤害人体,与此同时,单片机通过相应的驱动电路芯片、固态继电器和稳压集成电路芯片控制启动4k超清摄像头37加电工作,4k超清摄像头37采集接近本实用新型的出入人员者脸部生物影像特征数值,然后,将采集到的人脸部生物影像特征数据通过usb连接线发送至计算机进行识别比对,计算机将比对的结果通过视频显示器示出的图像信号或扬声器发出的语音信号通知当前在被人脸识别的出入人员的识别比对结果,如果出入人员将手指前端经穿孔伸至旋转筒体41按压指纹采集器5的表面时,手指的稍许按压作用力便会通过指纹采集器5传导给微型压力传感器4,微型压力传感器4因受按压或挤压而给单片机发送相应电信号,单片机则立即通过相应的驱动电路芯片、固态继电器和稳压集成电路芯片控制启动指纹采集器5加电工作,指纹采集器5将出入者手指的指纹影像特征数据通过单片机发送到计算机进行识别比对,计算机将比对的结果通过视频显示器示出的图像信号或扬声器发出的语音信号通知当前在被人脸识别的出入人员的识别比对结果,如果需要进一步对出入者的指静脉影像特征进行采集,单片机则同时通过相应的驱动电路芯片、固态继电器和稳压集成电路芯片控制启动小型直流减
速旋转电动机35、绝缘漆包导电线圈24、磁敏传感器48加电工作,此时,绝缘漆包导电线圈24至少加载反向电流,反向电流使绝缘漆包导电线圈24与第二圆柱状钕铁硼永磁铁块26彼此相邻的端头的磁极极性相同,即绝缘漆包导电线圈24生成的电磁磁场方向与第二圆柱状钕铁硼永磁铁块26的永磁磁场方向相反,而且,绝缘漆包导电线圈24的电磁磁场力略大于或等于第一圆柱状钕铁硼永磁铁块25的永磁磁场力,故第一圆柱状钕铁硼永磁铁块25的永磁磁场力与绝缘漆包导电线圈24的电磁磁场力在叠加后相互抵消,出现无明显磁力或磁极的状态或使得第一圆柱状钕铁硼永磁铁块25和绝缘漆包导电线圈24共同生成的总复合叠加磁场明显出现的磁极方向最终与第二圆柱状钕铁硼永磁铁块26的永磁磁场方向相反,总复合叠加磁场与第二圆柱状钕铁硼永磁铁块26的永磁磁场彼此相邻的端头的磁极极性依然相同,并发送磁场变化波动的电信号发送给单片机,基于相同磁场极性互相排斥的原理,而且固定环8与旋转筒体41相互固定,所以,总复合叠加磁场与第二圆柱状钕铁硼永磁铁块26在彼此接近且相对彼此的磁极极性相同的情况下,就会产生相互排斥的电磁作用力,电磁作用力驱动第一圆柱状钕铁硼永磁铁块25和第二圆柱状钕铁硼永磁铁块26相互分离,相应成对的磁敏传感器48也会感测到总复合叠加磁场变化,单片机根据磁敏传感器48发送的磁场变化电信号继续控制小型直流减速旋转电动机35工作,继而有助于小型直流减速旋转电动机35继续无明显阻碍地依次通过传动轴20、旋转后端板42驱使旋转筒体41自转,旋转筒体41自转在自转的过程中始终受到轴承6的支承,轴承6的轴承内圈47和旋转筒体41共同旋转,在旋转筒体41上固定安装有的电磁感应作用器件36也随同旋转筒体41公转,轴承6的轴承外圈7则以保持固定的状态通过其旋转的轴承内圈47支承并固定桶状旋转体9、旋转筒体41、旋转后端板42及旋转筒体41安装有的用电器件,无论轴承6的轴承内圈47是否转动,轴承6的轴承外圈7均能通过无论轴承6的轴承内圈47支承桶状旋转体9及其安装有的用电器件,当一个第二圆柱状钕铁硼永磁铁块26公转接近原本与另一个第二圆柱状钕铁硼永磁铁块26相互永磁吸引的一组电磁感应作用器件36时,此组电磁感应作用器件36中的先接近这个第二圆柱状钕铁硼永磁铁块26的一个磁敏传感器48也会相应感测到磁场变化,并立即将磁场变化电信号发送给单片机,以触发单片机通过相应的驱动电路芯片、固态继电器、稳压集成电路芯片和导电滑环控制与发送磁场变化电信号的一组电磁感应作用器件36中的绝缘漆包导电线圈24掉电,并通过相应的驱动电路芯片、固态继电器、稳压集成电路芯片控制小型直流减速旋转电动机35掉电,绝缘漆包导电线圈24掉电后则失去电磁场与磁力,此时,套装有该绝缘漆包导电线圈24的第一圆柱状钕铁硼永磁铁块25由于很接近相应的一个第二圆柱状钕铁硼永磁铁块26,第一圆柱状钕铁硼永磁铁块25也就和与之相接近的第二圆柱状钕铁硼永磁铁块26通过彼此的永磁磁力在彼此相对的端头磁极相异和彼此之间的间隙距离达到最小程度的情况下使在小型直流减速旋转电动机35掉电后还在短暂靠惯性自转的旋转筒体41停转,再次保持旋转筒体41稳定静止而不转动的状态,此时,旋转筒体41旋转180
°
,在旋转筒体41旋转180
°
之前,指纹采集器5位于微距红外摄像机17的正下方,在旋转筒体41旋转180
°
之后,微距红外摄像机17位于指纹采集器5的正下方,接着,单片机配合通过相应的驱动电路芯片、固态继电器、稳压集成电路芯片控制近红外led灯27加电发光,近红外led灯27从凹陷型灯槽38内主要向旋转筒体内靠近红外低通滤波片15与的空间(出入者手指指腹在红外低通滤波片15放置时所占用的空间)持续发出近红外光,与此同时,出入者手指伸入旋转筒体内在指腹朝下的情况下放置在红外低通滤波片上,近红外光可透过
弧面状透明石英玻璃罩29对照射手指内部的静脉,并从经静脉反射出的特定的近红外光向下射进微距红外摄像机17的物镜,微距红外摄像机17其物镜将从反射下来的近红外光进行近红外成像,并将从中获取的指静脉生物特征影像数据通过单片机发送到计算机进行识别比对,计算机将比对的结果通过视频显示器示出的图像信号或扬声器发出的语音信号通知当前在被人脸识别的出入人员的识别比对结果。
36.设置成对的磁敏传感器48则配合旋转筒体41的正反转,旋转筒体41的正反转由小型直流减速旋转电动机35的正反转控制,所以本实用新型采用两组固态继电器和稳压集成电路芯片的方式(第七固态继电器、第七稳压集成电路芯片 第八固态继电器、第八稳压集成电路芯片),使第七稳压集成电路芯片的电源输出端和小型直流减速旋转电动机35的直流电源输入端电极正接,使第八稳压集成电路芯片的电源输出端的电源输出端和小型直流减速旋转电动机35的直流电源输入端电极反接,通过单片机设定第七固态继电器的输出被控制端和第八固态继电器的输出被控制端不能同时导通,即单片机在控制第七固态继电器的输出被控制端导通时, 第八固态继电器的输出被控制端则断开,反之亦然。本实用新型采用的现有导电滑环12,可使连接电源适配器和安装在旋转筒体41上的用电器件的供电线和信号输送线不会绞缠在传动轴20和旋转筒体41上。
37.本实用新型也可以加装图像显示器、扬声器、存储硬盘或flash存储器等,使之与单片机有线通信连接,使其具备独立采集、识别并存储生物特征影像的功能,以替代计算机采集、识别并存储生物特征影像的功能。
38.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。