1.本发明涉及自动驾驶技术领域,具体为一种基于区块链的自动驾驶导航系统。
背景技术:
2.现有的农药喷洒方式大多为均匀喷洒方式,在农药喷洒区域内,中心和四周的农药浓度相同,会造成对中心密集区害虫杀伤力不足,四周农药过度喷洒浪费资源等问题。
3.根据科学研究发现,不同农药混合有时会对农作物产生副作用,例如波尔多液与石硫合剂分别使用,能防治多种病害,但它们混合后很快就会发生化学变化,生成黑褐色硫化铜沉淀,这不仅破坏了两种药剂原有的杀菌能力。而且生成的硫化铜会进一步产生铜离子,使植物发生落叶、落果、叶片和果实出现灼伤斑,或干缩等严重药害现象。这两种农药混用会产生相反的效果。实用性差。为了防止这两种农药在喷洒过程中混合到一起,因此,设计实用性强的一种基于区块链的自动驾驶导航系统是很有必要的。
技术实现要素:
4.本发明的目的在于提供一种基于区块链的自动驾驶导航系统,以解决上述背景技术中提出的问题。
5.为了解决上述技术问题,本发明提供如下技术方案:一种基于区块链的自动驾驶导航系统,包括环境监测模块和自动驾驶模块;
6.所述环境监测模块用于监测种植园的害虫分布情况,所述自动驾驶模块用于农药车自动驾驶导航和农药喷洒。
7.根据上述技术方案,所述环境监测模块包括红外监测模块、密度计算模块、数据存储模块,所述自动驾驶模块包括定位模块、地图分析模块、规划模块、喷洒单元;
8.所述密度计算模块与数据存储模块电连接,红外监测模块可以检测害虫发射的红外线;定位模块与数据存储模块电连接;
9.所述红外监测模块用于监测农药车监测范围内害虫分布,密度计算模块计算监测范围内害虫密度,将分析数据上传于数据存储模块,确定农药喷洒位置,定位模块确定农药车位置,记录农药喷洒坐标,地图分析模块用于输入和分析种植园地图线路,规划模块用设置农药车自动驾驶导航路径,喷洒单元用于喷洒农药。
10.根据上述技术方案,所述自动驾驶导航系统的具体工作步骤为:
11.s1、将种植园内地图路线输入地图分析模块,规划模块完成农药车的自动驾驶路径规划,定位模块将农药车位置上传至数据存储模块,农药车根据规划模块的规划路径开始进行自动驾驶;
12.s2、环境监测模块开始分析记录监测范围内害虫分布,当监测范围内出现害虫时,密度计算模块记录的害虫数量并将数据上传至数据存储模块;
13.s3、密度计算模块计算监测范围内害虫种群密度,(μ为害虫种群密度,m为
监测面积,n为监测面积内害虫数量),将计算出的密度结果上传至数据存储模块;
14.s4、当监测范围m内害虫种群密度μ大于数据存储模块内的害虫种群密度预设值时,判断该范围内出现虫害,此时监测范围m中心处为害虫中心点,农药车停止运动,喷洒单元在m中心点处进行农药喷洒工作,喷洒单元作业完成后,农药车继续按照规划路线自动驾驶。
15.根据上述技术方案,所述s4中,农药喷洒半径为r,害虫中心点喷洒农药浓度为p,半径r处的农药浓度为0,喷洒农药的浓度分布具有中间最高依次向外线性降低的特点。
16.根据上述技术方案,所述喷洒单元还包括喷洒单元一,喷洒单元二,环境监测模块还包括计时模块,喷洒计算模块;
17.所述喷洒计算模块与数据存储模块电连接,喷洒计算模块用于分析两种类型农药的分布面积,并将数据上传至数据存储模块。
18.根据上述技术方案,所述计时模块的具体工作方式为记录每次农药喷洒的时间t
i
(i=1,2,3
……
n),并将数据上传至数据存储模块,计时器的当前时间为t,因此农药挥发时间t=t
‑
t
i
。
19.根据上述技术方案,所述喷洒计算模块的具体计算方法为:
20.设农药挥发速度为v,距中心点r处距离的农药浓度因此喷洒农药后的效果半径
21.根据上述技术方案,所述自动驾驶导航系统的农药喷洒方法为:
22.s5、在自动驾驶导航系统初次工作时,将种植园内地图线路输入地图分析模块,根据输入线路确定适合农药喷洒的坐标范围(
‑
x
a
~ x
a
,
‑
y
b
~ y
b
),并将数据录入数据存储模块;
23.s6、喷洒喷洒单元一的农药时,根据定位模块的记录,在数据存储模块内记录下此时m的中心点坐标值(x1,y1),之后每次完成喷洒单元一的农药喷洒工作都将中心点坐标上传至数据存储模块(x2,y2)(x3,y3)
……
(x
n
,y
n
);
24.s7、完成农药一的喷洒后,喷洒计算模块开始计算喷洒单元二的农药喷洒工作,定位模块将农药二喷洒位置坐标记录在数据存储器中,农药车根据规划模块路径继续自动驾驶,以此往复。
25.根据上述技术方案,所述s7中,农药二喷洒位置坐标(x,y)必须满足以下条件:
[0026][0027]
式中r为喷洒单元一农药的效果半径;r为农药二喷洒半径;i为农药一的喷洒坐标次序。
[0028]
根据上述技术方案,所述喷洒单元一和喷洒单元二分别喷洒石硫合剂和波尔多液两种农药。
[0029]
与现有技术相比,本发明所达到的有益效果是:本发明的自动驾驶导航系统可以
精确有效的完成种植园农药喷洒工作,喷洒农药的浓度分布具有中间浓度最高,浓度依次向外线性降低的特点,农药浓度的分布方式依据监测出的害虫种群密度分布,可以大大提高对中心密集区域害虫的杀伤力,并且降低农药喷洒时中心害虫向四周逃窜的存活概率,从而节省成本,提高效率,减少不必要的浪费,农药喷洒单元的喷洒方式可以有效防止农药一和农药二喷洒时造成混合,避免两种农药混合时产生的严重药害现象。
附图说明
[0030]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
[0031]
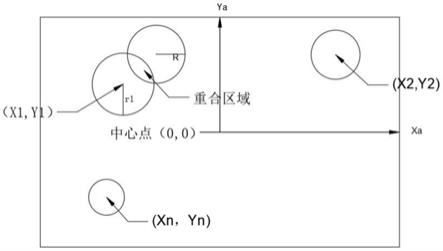
图1是本发明的整体原理示意图;
[0032]
图2是本发明的结构示意图;
[0033]
图中:中心点(0,0)为种植园内中心坐标,(x,y)为喷洒坐标,r为农药喷洒半径,r为挥发后的农药半径,重合区域的面积必须为0。
具体实施方式
[0034]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0035]
请参阅图1
‑
2,本发明提供技术方案:一种基于区块链的自动驾驶导航系统,包括环境监测模块和自动驾驶模块;
[0036]
环境监测模块用于监测种植园的害虫分布情况,自动驾驶模块用于农药车自动驾驶导航和农药喷洒;
[0037]
环境监测模块包括红外监测模块、密度计算模块、数据存储模块,自动驾驶模块包括定位模块、地图分析模块、规划模块、喷洒单元;
[0038]
密度计算模块与数据存储模块电连接,红外监测模块可以检测害虫发射的红外线;定位模块与数据存储模块电连接;
[0039]
红外监测模块用于监测农药车监测范围内害虫分布,密度计算模块计算监测范围内害虫密度,将分析数据上传于数据存储模块,确定农药喷洒位置,定位模块确定农药车位置,记录农药喷洒坐标,地图分析模块用于输入和分析种植园地图线路,规划模块用设置农药车自动驾驶导航路径,喷洒单元用于喷洒农药,该系统可以结合种植园中的具体路径,通过自动驾驶导航高效的完成农药喷洒工作。
[0040]
该自动驾驶导航系统的工作步骤为:
[0041]
s1、将种植园内地图路线输入地图分析模块,规划模块完成农药车的自动驾驶路径规划,定位模块将农药车位置上传至数据存储模块,农药车根据规划模块的规划路径开始进行自动驾驶;
[0042]
s2、环境监测模块开始分析记录监测范围内害虫分布,当监测范围内出现害虫时,密度计算模块记录的害虫数量并将数据上传至数据存储模块;
[0043]
s3、密度计算模块计算监测范围内害虫种群密度,(μ为害虫种群密度,m为监测面积,n为监测面积内害虫数量),将计算出的密度结果上传至数据存储模块;
[0044]
s4、当监测范围m内害虫种群密度μ大于数据存储模块内的害虫种群密度预设值时,判断该范围内出现虫害,此时监测范围m中心处为害虫中心点,农药车停止运动,喷洒单元在m中心点处进行农药喷洒工作,喷洒单元作业完成后,农药车继续按照规划路线自动驾驶。
[0045]
s4中,农药喷洒半径为r,害虫中心点喷洒农药浓度为p,半径r处的农药浓度为0,喷洒农药的浓度分布具有中间最高依次向外线性降低的特点;
[0046]
喷洒单元还包括喷洒单元一,喷洒单元二,环境监测模块还包括计时模块,喷洒计算模块,可以避免喷洒不同类型农药时农药混合的药害现象;
[0047]
喷洒计算模块与数据存储模块电连接,喷洒计算模块用于分析两种类型农药的分布面积,并将数据上传至数据存储模块;
[0048]
计时模块的具体工作方式为记录每次农药喷洒的时间t
i
(i=1,2,3
……
n),并将数据上传至数据存储模块,计时器的当前时间为t,因此农药挥发时间t=t
‑
t
i
。
[0049]
喷洒计算模块的具体计算方法为:
[0050]
设农药挥发速度为v,距中心点r处距离的农药浓度因此喷洒农药后的效果半径
[0051]
该自动驾驶导航系统的农药喷洒方法为:
[0052]
s5、在自动驾驶导航系统初次工作时,将种植园内地图线路输入地图分析模块,根据输入线路确定适合农药喷洒的坐标范围(
‑
x
a
~ x
a
,
‑
y
b
~ y
b
),并将数据录入数据存储模块;
[0053]
s6、喷洒喷洒单元一的农药时,根据定位模块的记录,在数据存储模块内记录下此时m的中心点坐标值(x1,y1),之后每次完成喷洒单元一的农药喷洒工作都将中心点坐标上传至数据存储模块(x2,y2)(x3,y3)
……
(x
n
,y
n
);
[0054]
s7、完成农药一的喷洒后,喷洒计算模块开始计算喷洒单元二的农药喷洒工作,定位模块将农药二喷洒位置坐标记录在数据存储器中,农药车根据规划模块路径继续自动驾驶,以此往复;
[0055]
s7中,农药二喷洒位置坐标(x,y)必须满足以下条件:
[0056][0057]
式中r为喷洒单元一农药的效果半径;r为农药二喷洒半径;i为农药一的喷洒坐标次序。
[0058]
实施例:农药车在完成一公顷种植园的农药一的喷洒工作后,进行农药二的首次喷洒工作,此时x
a
=50,y
a
=50,设农药喷洒的半径r为10m,农药挥发速度ν为1m/天,此时距
时间间隔一周的某次农药一喷洒坐标(20,30)效果半径r为3m,当农药车根据规划模块移动至坐标(
‑
10,0)处时环境监测模块判断需要喷洒农药,依据s7中条件,喷洒计算模块判定满足条件可以喷洒农药,进行喷洒单元二的农药喷洒工作。
[0059]
喷洒单元一和喷洒单元二分别喷洒石硫合剂和波尔多液两种农药。
[0060]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
[0061]
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

