1.本发明涉及无人机的控制技术领域,尤其涉及一种无人机的飞行控制方法、装置及无人机。
背景技术:
2.随着用电需求的不断增加,如何稳定地进行电力传输是其中一个重要的环节。为了确保电力传输的稳定性,需要时刻检测各个基站及电路的实时状态。
3.传统的检测方式是人工巡检作业,但人工巡检的劳动强度大,效率低,难以满足现有的检测需求。为了满足现有的检测需求,目前常用的检测方式是无人机巡检,无人机的检测效率高,成本低,且操作方便,也可以大大降低检测强度。
4.但目前采用无人机的巡检方法有如下技术问题:由于目前常用的无人机是搭载锂电池,而在冬季或西北寒冷地区或高空进行巡检时,由于温度较低,使得无人机电源的化学反应速度变慢,电解液阻值变大,锂离子穿越性能变差,活性降低,放电的电流变小,导致电池的可用容量降低,无人机的续航能力较差,缩短了无人机的飞行距离,也缩减了巡检的范围,延长了巡检时间。
技术实现要素:
5.本发明提出一种无人机的飞行控制方法、装置及无人机,所述方法可以在电池温度或电池容量低于预设值时给电池进行加热,以增加电池容量,提高无人机的续航能力。
6.本发明实施例的第一方面提供了一种无人机的飞行控制方法,所述方法适用于搭载了发热器件的无人机,所述方法包括:
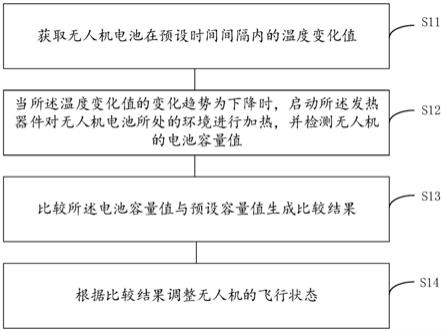
7.获取无人机电池在预设时间间隔内的温度变化值;
8.当所述温度变化值的变化趋势为下降时,启动所述发热器件对无人机电池所处的环境进行加热,并检测无人机的电池容量值;
9.比较所述电池容量值与预设容量值生成比较结果;
10.根据比较结果调整无人机的飞行状态。
11.在第一方面的一种可能的实现方式中,所述根据比较结果调整无人机的飞行状态,包括:
12.当所述比较结果为所述电池容量值大于预设容量值时,则保持当前的飞行状态;
13.当所述比较结果为所述电池容量值等于预设容量值时,则调整所述发热器件的加热温度,并控制无人机的飞行速率;
14.当所述比较结果为所述电池容量值小于预设容量值时,则将无人机的供电电池切换至备用电池。
15.在第一方面的一种可能的实现方式中,在所述将无人机的供电电池切换至备用电池的步骤后,所述方法还包括:
16.当备用电池的电池容量值小于预设容量值时,获取无人机的当前定位坐标,以及
计算无人机的飞行距离;
17.以所述当前定位坐标为中心和以所述飞行距离为半径划分并紧急飞行区域;
18.在所述紧急飞行区域中查找多个充电站坐标,并计算每个所述充电站坐标与所述当前定位坐标的坐标距离,得到多个坐标距离;
19.从所述多个坐标距离中筛选数值最小的坐标距离,并控制无人机飞行至所述数值最小的坐标距离对应的充电站进行紧急充电。
20.在第一方面的一种可能的实现方式中,所述计算无人机的飞行距离,包括:
21.获取无人机的飞行参数;
22.基于所述飞行参数和所述备用电池的电池容量计算飞行距离。
23.在第一方面的一种可能的实现方式中,所述启动所述发热器件对无人机电池所处的环境进行加热,包括:
24.采集无人机所处环境的环境温度和无人机电池的起始温度;
25.采用所述环境温度和起始温度计算调整温度;
26.基于所述调整温度控制所述发热器件对无人机电池所处的环境进行加热。
27.本发明实施例的第二方面提供了一种无人机的飞行控制装置,所述装置包括:
28.获取模块,用于获取无人机电池在预设时间间隔内的温度变化值;
29.启动模块,用于当所述温度变化值的变化趋势为下降时,启动所述发热器件对无人机电池所处的环境进行加热,并检测无人机的电池容量值;
30.比较模块,用于比较所述电池容量值与预设容量值生成比较结果;
31.调整模块,用于根据比较结果调整无人机的飞行状态。
32.本发明实施例的第三方面提供了一种无人机,所述无人机采用了如上所述的无人机的飞行控制方法,所述无人机包括机体和存储空腔;
33.所述存储空腔设置在所述机体的底部;
34.所述存储空腔设有供电电池、备用电池和发热器件。
35.在第三方面的一种可能的实现方式中,所述存储空腔的底部设有拉扣和夹紧器件。
36.相比于现有技术,本发明实施例提供的一种无人机的飞行控制方法、装置及无人机,其有益效果在于:本发明可以实时检测无人机的电池温度,在电池温度下降时加热,以提高电池温度,防止电池的容量下降,提高电池的使用效率;同时,在加热过程中实时检测电池容量值,并根据电池容量值调整无人机的飞行状态,以用户的满足飞行要求。
附图说明
37.图1是本发明一实施例提供的一种无人机的飞行控制方法的流程示意图;
38.图2是本发明一实施例提供的一种无人机的飞行控制装置的结构示意图;
39.图3是本发明一实施例提供的一种无人机的飞行控制方法的结构示意图。
具体实施方式
40.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
41.目前采用无人机的巡检方法有如下技术问题:由于目前常用的无人机是搭载锂电池,而在冬季或西北寒冷地区或高空进行巡检时,由于温度较低,使得无人机电源的化学反应速度变慢,电解液阻值变大,锂离子穿越性能变差,活性降低,放电的电流变小,导致电池的可用容量降低,无人机的续航能力较差,缩短了无人机的飞行距离,也缩减了巡检的范围,延长了巡检时间。
42.为了解决上述问题,下面将通过以下具体的实施例对本技术实施例提供的一种无人机的飞行控制方法进行详细介绍和说明。
43.参照图1,示出了本发明一实施例提供的一种无人机的飞行控制方法的流程示意图。
44.在本实施例中,所述方法可以应用于搭载了发热器件的无人机,其中发热器件可以设置在无人机电池的周边,可以通过加热器件对电池所处区域进行加热,使得电池周边的环境升温,从而提高电池的容量值。
45.具体地,该发热器件可以是硅钼棒,硅碳棒或铬酸镧等。
46.在本实施例中,所述无人机可以将电池和发热器件放置在空腔中,一方面可以将电池与外界环境隔绝,另一方面可以方便发热器件对电池所在的环境或空腔进行加热,使得电池升温。
47.其中,作为示例的,所述无人机的飞行控制方法,可以包括:
48.s11、获取无人机电池在预设时间间隔内的温度变化值。
49.在本实施例中,可以在电池所在的空腔中设置温度传感器,温度传感器可以检测预设时间间隔内的温度变化值,该预设时间间隔可以是5分钟、10分钟或20分钟。
50.例如,预设时间间隔为5分钟,可以获取第一分钟的温度值,可以获取第五分钟的温度值,然后将第一分钟的温度值和第五分钟的温度值相减,得到温度变化值。
51.s12、当所述温度变化值的变化趋势为下降时,启动所述发热器件对无人机电池所处的环境进行加热,并检测无人机的电池容量值。
52.在获取温度变化值后,可以判断温度变化值是正数、0或负数。若温度变化值为正数,则电池温度逐渐提升,确定电池在使用过程中发热;若温度变化值为0,则确定电池的温度没有变化;若温度变化值为负数,则确定电池的温度逐渐下降,可以确定其变化趋势为下降。
53.当电池的温度逐渐下降,可以判断电池所处的环境温度下降,温度下降可能导致电池容量减少,为了避免电池容量减少,可以启动发热器件在电池所处的环境或区域进行加热,通过提高电池的环境温度,以提高电池的温度。
54.在加热升温的同时可以实时监测电池容量值,并进一步确定电池容量值的变化。
55.在加热过程中,若持续高温加热,电池的温度会过高,可能会破坏电池内的化学平衡,导致副反应。为了避免电池温度过高的情况,在一可选的实施例中,步骤s12可以包括以下子步骤:
56.子步骤s121、采集无人机所处环境的环境温度和无人机电池的起始温度。
57.具体地,该起始温度为电池在正常工作时的温度,可以在无人机起飞后采集起始
温度。该环境温度为无人机所处的外界环境的温度,可以通过无人机表面的传感器实时采集所处环境的温度。
58.子步骤s122、采用所述环境温度和起始温度计算调整温度。
59.可以将起始温度减去环境温度,得到调整温度。
60.子步骤s123、基于所述调整温度控制所述发热器件对无人机电池所处的环境进行加热。
61.在确定调整温度后,可以根据调整温度控制发热器件启动,并将电池所在的区域或环境进行加热,直到电池所处的环境的温度达到起始温度。
62.s13、比较所述电池容量值与预设容量值生成比较结果。
63.在获取电池容量值后,可以比较当前的电池容量值与预设容量值的大小,从而可以根据比较结果进行调整。
64.因为在先检测的温度变化值是一段时间间隔内的温度变化值,若在高空或寒冷的西北地区,其温度变化较大,在一定的时间间隔内电池可能已从正常的工作温度中急剧下降,使得电池容量值迅速下降,从而无法正常飞行,为了避免上述情况,可以根据比较结果进行相应的飞行调整,避免因电量不足而发生坠机的情况。
65.在具体实现中,预设容量值为无人机飞行至目标位置的最低容量值。
66.具体地,在检测电池容量值后获取无人机的当前坐标以及无人机飞行的目标坐标;基于当前坐标和目标坐标计算无人机的飞行距离;然后通过飞行距离以及无人机的额定飞行速度计算最低容量值。
67.s14、根据比较结果调整无人机的飞行状态。
68.该飞行状态可以是保持现有的飞行速度飞行,可以降落,可以返航,也可以减速飞行等等。
69.为了让飞行更加符合实际要求,其中,作为示例的,步骤s14可以包括以下子步骤:
70.子步骤s141、当所述比较结果为所述电池容量值大于预设容量值时,则保持当前的飞行状态。
71.当电池容量值大于预设容量值时,可以确定无人机的电池还有充足的电池容量值,可以保持当前的飞行状态。其中,保持当前的飞行状态可以包括保持现有的飞行速度和飞行高度。
72.子步骤s142、当所述比较结果为所述电池容量值等于预设容量值时,则调整所述发热器件的加热温度,并控制无人机的飞行速率。
73.电池容量值等于预设容量值,确定无人机可以飞行至目标地,但为了避免中途出现意外(例如温度进一步下降导致电池容量值进一步下降),可以适当降低无人机的飞行速度,可以减少其电池的输出功率,降低耗能,以满足飞行至目的地的需求。
74.子步骤s143、当所述比较结果为所述电池容量值小于预设容量值时,则将无人机的供电电池切换至备用电池。
75.当电池容量值小于预设容量值时,确定无人机已无法飞行至目的地,为了避免出现坠机的情况,可以将当前的供电电源切断至备用电池,由备用电池进行供电。
76.具体地,备用电池与原有的电池也可以设置在同一个空腔中,由于备用电池的电量充足,可以满足无人机的飞行要求。
77.在使用时,若备用电池的电池容量也小于预设容量值,备用电池也无法为无人机提供足够的电量飞行,为了避免发生坠机的情况,在一可选的实施例中,步骤s14还可以包括以下子步骤:
78.子步骤s144、当备用电池的电池容量值小于预设容量值时,获取无人机的当前定位坐标,以及计算无人机的飞行距离。
79.具体地,该当前定位坐标为无人机的当前坐标。该飞行距离为无人机在当前电量的情况下可以飞行的距离。具体地,可以是在备用电池的当前电量的条件下无人机可以飞行的距离。
80.为了准确计算飞行距离,在可选的实施例中,子步骤s144可以包括以下子步骤:
81.子步骤s1441、获取无人机的飞行参数。
82.该飞行参数为无人机的额定飞行速度。
83.子步骤s1442、基于所述飞行参数和所述备用电池的电池容量值计算飞行距离。
84.可以通过备用电池的电池容量值确定飞行时间,将飞行时间与额定飞行速度相乘,得到飞行距离。
85.子步骤s145、以所述当前定位坐标为中心和以所述飞行距离为半径划分并紧急飞行区域。
86.在确定当前定位坐标和飞行距离后,可以以当前定位坐标为圆心,飞行距离为半径划分一个紧急飞行区域,该紧急飞信区域为无人机进行紧急降落的区域。
87.子步骤s146、在所述紧急飞行区域中查找多个充电站坐标,并计算每个所述充电站坐标与所述当前定位坐标的坐标距离,得到多个坐标距离。
88.可以在该紧急飞行区域中查找多个充电站坐标。
89.每个充电站可以收放无人机,也可以为无人机充电。
90.可以计算每个充电站坐标与当前定位坐标的坐标距离,得到多个坐标距离。
91.子步骤s147、从所述多个坐标距离中筛选数值最小的坐标距离,并控制无人机飞行至所述数值最小的坐标距离对应的充电站进行紧急充电。
92.接着从多个坐标距离中筛选数值最小的坐标距离,以数值最小的坐标距离对应的充电站为无人机进行紧急降落的目标充电站,接着可以控制无人机飞行到该目标充电站中进行充电。
93.在一可选的实施例中,若在飞行区域中没有充电站,则可以在当前定位坐标中悬空飞行,并通知用户进行回收。
94.在悬空飞行过程中也实时监测备用电池的电池容量值,若悬空飞行时备用电池的电池容量值低于紧急容量值,则控制无人机缓慢地进行紧急降落。
95.在本实施例中,本发明实施例提供了一种无人机的飞行控制方法,其有益效果在于:本发明可以实时检测无人机的电池温度,在电池温度下降时加热,以提高电池温度,防止电池的容量下降,提高电池的使用效率;同时,在加热过程中实时检测电池容量值,并根据电池容量值调整无人机的飞行状态,以用户的满足飞行要求。
96.本发明实施例还提供了一种无人机的飞行控制装置,参见图2,示出了本发明一实施例提供的一种无人机的飞行控制装置的结构示意图。
97.其中,作为示例的,所述装置适用于搭载了发热器件的无人机,所述装置包括:
98.获取模块201,用于获取无人机电池在预设时间间隔内的温度变化值;
99.启动模块202,用于当所述温度变化值的变化趋势为下降时,启动所述发热器件对无人机电池所处的环境进行加热,并检测无人机的电池容量值;
100.比较模块203,用于比较所述电池容量值与预设容量值生成比较结果;
101.调整模块204,用于根据比较结果调整无人机的飞行状态。
102.可选地,所述调整模块还用于:
103.当所述比较结果为所述电池容量值大于预设容量值时,则保持当前的飞行状态;
104.当所述比较结果为所述电池容量值等于预设容量值时,则调整所述发热器件的加热温度,并控制无人机的飞行速率;
105.当所述比较结果为所述电池容量值小于预设容量值时,则将无人机的供电电池切换至备用电池。
106.可选地,在所述将无人机的供电电池切换至备用电池的步骤后,所述装置还包括:
107.计算模块,用于当备用电池的电池容量值小于预设容量值时,获取无人机的当前定位坐标,以及计算无人机的飞行距离;
108.划分模块,用于以所述当前定位坐标为中心和以所述飞行距离为半径划分并紧急飞行区域;
109.查找模块,用于在所述紧急飞行区域中查找多个充电站坐标,并计算每个所述充电站坐标与所述当前定位坐标的坐标距离,得到多个坐标距离;
110.筛选模块,用于从所述多个坐标距离中筛选数值最小的坐标距离,并控制无人机飞行至所述数值最小的坐标距离对应的充电站进行紧急充电。
111.可选地,所述计算模块还用于:
112.获取无人机的飞行参数;
113.基于所述飞行参数和所述备用电池的电池容量计算飞行距离。
114.可选地,所述启动模块还用于:
115.采集无人机所处环境的环境温度和无人机电池的起始温度;
116.采用所述环境温度和起始温度计算调整温度;
117.基于所述调整温度控制所述发热器件对无人机电池所处的环境进行加热。
118.本发明实施例还提供了一种无人机,参见图3,示出了本发明一实施例提供的一种无人机的结构示意图。
119.其中,作为示例的,所述无人机采用了如上述实施例所述的无人机的飞行控制方法。
120.参照图3,所述无人机包括机体1和存储空腔2;
121.其中,所述存储空腔2设置在所述机体1的底部;
122.所述存储空腔2设有供电电池21、备用电池22和发热器件23。
123.可选地,所述存储空腔2的底部设有拉扣24和夹紧器件25。
124.进一步的,本技术实施例还提供了一种电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述实施例所述的无人机的飞行控制方法。
125.进一步的,本技术实施例还提供了一种计算机可读存储介质,所述计算机可读存
储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如上述实施例所述的无人机的飞行控制方法。
126.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

