一种精密灌封胶机软plc控制系统
技术领域
1.本实用新型涉及灌封胶机技术领域,尤其涉及一种精密灌封胶机软plc控制系统。
背景技术:
2.灌封胶机广泛应用于电子、电气、光电、新能源等产业的生产过程中,以解决产品对密封、绝缘、防水、防震的技术要求。目前灌封胶机的控制系统多采用传统硬plc控制方式,所谓传统硬plc从严格意义上来说是由硬件或者一块专用的asic芯片来实现plc指令的执行;由于传统硬plc的指令集是固定的,而实际工业应用中可能需要定义算法,传统硬plc限制在几家厂商生产,具有私有性,因此很难适应现有标准计算机网络,常常是plc与计算机处在不同类型的网络中,传统硬plc具有硬实时性,正因为如此它才能提供快速、确定而且可重复的响应,同时硬plc也具有难以构建开放的硬件体系、通讯协议困难且成本高和人机交互性差等缺点,导致传统硬plc普遍存在兼容性较差、通用性较差等问题。
3.软plc控制方式是在硬件型plc的基础上,以通用的工业pc和操作系统作为软硬件平台,用软件实现对传统plc的控制功能,支持众多现场总线,扩展性强,实时性好,适合在自动化控制系统中广泛使用。况且软plc控制的硬件成本较低,应用简单方便,易于网络柘朴,可用于各种工业现场的高速io互联及数据交互,其基本的通讯方式为主从通讯方式,单主多从通讯。由此,有必要研发一种精密灌封胶机软plc控制系统。
技术实现要素:
4.为了克服上述技术存在的问题,本实用新型的目的在于提供一种精密灌封胶机软plc控制系统,以解决上述背景技术中所提出的问题,实现对灌封胶机的精密控制,提高灌封胶质量。
5.本实用新型为解决上述技术问题采取的技术方案是:
6.所述新型控制系统包括工业pc、ethercat耦合器和多个驱动器,且组成单元之间的通信采用ethercat总线技术,所述工业pc作为主站,所述多个驱动器作为多个从站;其中:每个从站驱动器经由ethercat接口连接所述工业pc主站或其他从站驱动器,并且每个从站驱动器均对应地分别连接有各自所对应的电机。
7.所述工业pc主站采用一台c6640
‑
0020工业pc作为ethercat总线网路主站的主控制平台,所述工业pc连接有一台sg150
‑
bgcm触摸屏显示器。
8.所述ethercat耦合器采用一个ek1100 ethercat总线耦合器,与ethercat总线耦合器依次相连接的有pnp8点输入模块、npn8点输入模块、8点输出模块、模拟量输入模块、温度输入模块、手操器输入模块、手操器输出模块。
9.所述pnp8点输入模块采用2个el1088 8通道数字量输入端子模块连接有x轴正限位、x轴负限位、x轴零限位、y轴正限位、y负限位、y零限位、z轴正限位、z轴负限位、z轴零限位、大桶搅拌限位、大桶搅拌过载、清洗水泵过载、搅拌器电机过载、急停报警。
10.所述npn8点输入模块采用1个el1008 8通道数字量输入端子模块连接有第一a胶
液位传感器、第二a胶液位传感器、第三b胶液位传感器、操作按钮。
11.所述8点输出模块采用2个el2008 8通道数字量输出端子模块连接有电磁阀、a胶加热、b胶加热、z轴刹车、清洗水泵、搅拌器、大桶搅拌、指示灯。
12.所述模拟量输入模块采用1个el3054 4通道模拟量输入端子模块连接有第一计量泵a压力传感器、第二计量泵b压力传感器;
13.所述温度输入模块采用1个el3204 4通道模拟量输入端子模块连接有第一a胶温度传感器、第二b胶温度传感器、第三混合头温度传感器。
14.所述手操器输入模块采用3个el1008 8通道数字量输入端子模块连接有手操器输入按钮;
15.所述手操器输出模块采用2个el2008 8通道数字量输出端子模块连接有手操器输出指示。
16.所述多个驱动器从站,包括ac1计量泵a驱动器、ac2计量泵b驱动器、ac3 x轴驱动器、ac4 y轴驱动器、ac5 z轴驱动器和ac6混合头驱动器,均选用埃斯顿proect
‑
08aeg
‑
ecd伺服驱动器。
17.所述ac1计量泵a驱动器连接有计量泵a伺服电机,
18.所述ac2计量泵b驱动器连接有计量泵b伺服电机;
19.所述ac3 x轴驱动器连接有x轴伺服电机,
20.所述ac4 y轴驱动器连接有y轴伺服电机,
21.所述ac5 z轴驱动器连接有z轴伺服电机;
22.所述ac6 混合头驱动器连接有混合头伺服电机。
23.与现有技术相比,本实用新型的有益效果是:
24.1)本实用新型采用基于软plc技术和ethercat总线通讯方式,并结合一网到底式拓扑连接和驱动从站驱动器,有效地解决了传统硬plc系统中通讯协议困难和传输效率的问题,提高系统的实时性和可靠性;
25.2)本实用新型采用软plc控制系统,有效地解决了传统硬plc系统中也具有难以构建开放的硬件体系、通讯协议困难和人机交互性差等缺点,并支持多种编程语言,系统开放性和可拓展性更强;
26.3)本实用新型具有更强劲的数据处理能力,由于软plc能够利用pc机的资源,因此能获得更大的内存以及高速的cpu处理等,对数据的处理能力更强,而不受某个硬plc制造商本身技术的限制;
27.4)本实用新型具有更强劲的网络通信能力,凭借其控制精度高、通信距离远、传输数据量大等特点,使灌封胶控制更加精确和快速,可满足灌封胶机对控制速度与同步性的要求,实现了对灌封胶机的精确控制。
附图说明
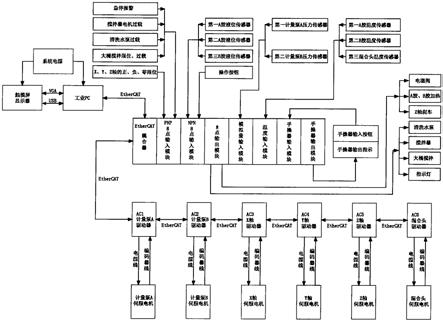
28.图1是本实用新型控制系统控制结构示意图;
29.图2是本实用新型控制系统硬件通讯连接结构示意图;
30.图3是本实用新型主控制电路连接结构示意图;
31.图4是本实用新型npn8点输入模块连接示意图;
32.图5是本实用新型模拟量输入模块连接示意图;
33.图6是本实用新型温度输入模块连接示意图。
具体实施方式
34.结合附图和本实用新型具体实施方式的描述,能够更加清楚地了解本实用新型的细节。但是,在此描述的本实用新型的具体实施方式,仅用于解释本实用新型的目的,而不能以任何方式理解成是对本实用新型的限制。
35.如图1所示为本实用新型控制系统结构示意图,所述控制系统包括工业pc、ethercat耦合器和多个驱动器,且组成单元之间的通信采用ethercat总线技术,所述工业pc作为主站,所述多个驱动器作为多个从站,包括ac1计量泵a驱动器、ac2计量泵b驱动器、ac3 x轴驱动器、ac4 y轴驱动器、ac5 z轴驱动器和ac6混合头驱动器,每个从站驱动器经由ethercat接口连接所述工业pc主站或其他从站驱动器,并且每个从站驱动器均对应地分别连接有各自所对应的伺服电机;所述工业pc主站通过twin
‑
cat3软件编程扫描多个从站驱动器,配置多个从站驱动器参数后开始进行运动轨迹、位置和速度的控制命令的规划,然后在每个dc(distribute clock)周期将运动轨迹、位置和速度等控制命令下发给多个从站驱动器,每个从站驱动器控制各自所对应的伺服电机运动,并通过各自所对应的编码器反馈,实时获取电流、速度、位置等伺服电机反馈的参数信息,形成闭环控制。
36.所述工业pc主站采用一台c6640
‑
0020工业pc作为ethercat总线网路主站的主控制平台,用于系统总体调度和人机交互,所述工业pc连接有一台sg150
‑
bgcm触摸屏显示器,用于系统人机交互界面显示,系统电源采用的是24v dc电源模块,也可选择配备集成式不间断电源(ups)为其工业pc和触摸屏显示器供电,电池组可以从外部进行连接,安装在靠近pc的din导轨上。
37.所述ethercat耦合器采用一个ek1100 ethercat总线耦合器,用于扩展i/o模块,实现外部模块之间的连接,所述ethercat线耦合器依次相连接的有pnp8点输入模块、npn8点输入模块、8点输出模块、模拟量输入模块、温度输入模块、手操器输入模块、手操器输出模块;所述ethercat总线耦合器ek1100配置两个以太网接口,第一个用于连接工业pc,第二个用于连接网路上其它ethercat从站设备,并由ethercat总线耦合器提供直流24v电源为其pnp8点输入模块、npn8点输入模块、8点输出模块、模拟量输入模块、温度输入模块、手操器输入模块、手操器输出模块供电。
38.所述pnp8点输入模块采用2个el1088 8通道数字量输入端子模块连接有x轴正限位、x轴负限位、x轴零限位、y轴正限位、y负限位、y零限位、z轴正限位、z轴负限位、z轴零限位、大桶搅拌限位、大桶搅拌过载、清洗水泵过载、搅拌器电机过载、急停报警,用于x\y\z轴的正\负\零限位、以及大桶搅拌限位\过载、以及清洗水泵过载、以及搅拌器电机过载、急停报警的数字量信号输入;
39.所述npn8点输入模块采用1个el1008 8通道数字量输入端子模块连接有第一a胶液位传感器、第二a胶液位传感器、第三b胶液位传感器、操作按钮,用于供胶单元a胶上、下液位、以及b胶下液位的监控、以及灌封胶启\停、水清洗、空气喷射、主气源压力的操作按钮启\停的数字量信号输入;
40.所述8点输出模块采用2个el2008 8通道数字量输出端子模块连接有电磁阀、a胶
加热、b胶加热、z轴刹车、清洗水泵、搅拌器、大桶搅拌、指示灯,用于传动单元z轴刹车、以及供胶单元a胶\b胶加热、以及供料阀\泄流阀\喷嘴锁紧\水清洗阀\空气喷射阀的电磁阀、以及清洗水泵\搅拌器\大桶搅拌、以及编辑灯\工作指示灯\停止指示灯\清洗指示灯\空气指示灯的数字量信号输出;
41.所述模拟量输入模块采用1个el3054 4通道模拟量输入端子模块连接有第一计量泵a压力传感器、第二计量泵b压力传感器,用于供胶单元胶计量泵a\b压力监控的模拟量信号输入;
42.所述温度输入模块采用1个el3204 4通道模拟量输入端子模块连接有第一a胶温度传感器、第二b胶温度传感器、第三混合头温度传感器,用于供胶单元a胶\b胶温度监控、以及出胶装置混合头温度监控的模拟量信号输入;
43.所述手操器输入模块采用3个el1008 8通道数字量输入端子模块连接有手操器输入按钮,用于混合器\供料阀\计量泵\喷嘴\回零\调试\定位\进给\连续点动\点动10mm\点动1mm\点动0.1mm\记录xy\记录z\x x
‑
\y y
‑
\z z
‑
\圆\圆弧\删除\暂停的手操器数字量信号输入;
44.所述手操器输出模块采用2个el2008 8通道数字量输出端子模块连接有手操器输出指示,用于混合器灯\供料阀灯\计量泵灯\喷嘴灯\回零灯\调试灯\定位灯\进给灯\连续点动灯\点动10mm灯\点动1mm灯\点动0.1mm灯\圆灯\圆弧灯\删除灯的手操器数字量信号输出,还用于供胶单元a胶加料阀的数字量信号输出。
45.所述ac1计量泵a驱动器采用1个具有ethercat通讯模块的埃斯顿proect
‑
08aeg
‑
ecd伺服驱动器,所述ac1计量泵a驱动器连接有计量泵a伺服电机;
46.所述ac2计量泵b驱动器采用1个具有ethercat通讯模块的埃斯顿proect
‑
08aeg
‑
ecd伺服驱动器,所述ac2计量泵b驱动器连接有计量泵b伺服电机。
47.所述ac3 x轴驱动器采用1个具有ethercat通讯模块的埃斯顿proect
‑
08aeg
‑
ecd伺服驱动器,所述ac3 x轴驱动器连接有x轴伺服电机;
48.所述ac4 y轴驱动器采用1个具有ethercat通讯模块的埃斯顿proect
‑
08aeg
‑
ecd伺服驱动器,所述ac4 y轴驱动器连接有y轴伺服电机;
49.所述ac5 z轴驱动器采用1个具有ethercat通讯模块的埃斯顿proect
‑
08aeg
‑
ecd伺服驱动器,所述ac5 z轴驱动器连接有z轴伺服电机。
50.所述ac6混合头驱动器采用1个具有ethercat通讯模块的埃斯顿proect
‑
08aeg
‑
ecd伺服驱动器,所述ac6混合头驱动器连接有混合头伺服电机。
51.如图2所示为本实用新型控制系统硬件通讯连接结构示意图,展示了ethercat耦合器的模块扩展,扩展i/o模块,实现外部模块之间的连接。本实用新型控制系统在硬件拓扑上采用“一网到底”的方式,所述ethercat总线耦合器对上接工业pc,对下依次串联输入输出模块以及ac1
‑
ac6伺服驱动器;在ethercat拓扑结构中,所述工业pc主站以全双工模式发出报文,各ac1、ac2供胶从站、ac3、ac4、ac5传动从站和ac6出胶从站根据自己在拓扑路径上的位置顺序移位读写数据帧,在报文经过从站时,从站从报文中提取发给自己的输出命令数据并将其存储到内部存储区,输入数据从内部存储区被写到相应的子报文中。所述工业pc与触摸屏显示器够成一个完整操作控制单元,其中工业pc搭载twincat3自动化开发平台,使用网络接口卡nic作为主站通讯接口,并且工业pc通过编程,再发送指令给ac1
‑
ac6伺
服控制器,各伺服控制器控制所对应的电机运动,并通过编码器反馈进行闭环控制。
52.如图3所示为本实用新型主控制电路连接结构示意图,包括清洗水泵、搅拌器、大桶搅拌、计量泵a、计量泵b、x轴电机、y轴电机、z轴电机、混合头电机、a胶加热、b胶加热、供电电源等部件的电路连接。断路器qf3、qr4、qf5、qf6、qr7、qf8分别将三相电源引入各自所对应连接的ac1伺服(计量泵a)驱动器、ac2伺服(计量泵b)驱动器、ac3伺服(x轴)驱动器、ac4伺服(y轴)驱动器、ac5伺服(z轴)驱动器、ac6伺服(混合头)驱动器,同时qf3、qr4、qf5、qf6、qr7、qf8为电路提供短路保护。
53.如图4所示为本实用新型npn8点输入模块连接示意图,所述npn8点输入模块分别与ethercat耦合器、第一a胶液位传感器、第二a胶液位传感器、第三b胶液位传感器、操作按钮连接,实时采集a胶、b胶原料液位的信号,为液位精确控制提供设备侧反馈信号。
54.如图5所示为本实用新型模拟量输入模块连接示意图,所述模拟量输入模块分别与ethercat耦合器、第一计量泵a压力传感器、第二计量泵b压力传感器连接,实时采集计量泵a、计量泵b压力的信号,为恒压精确控制提供设备侧反馈信号。
55.如图6所示为本实用新型温度输入模块连接示意图,所述温度采集模块分别与ethercat耦合器、第一a胶温度传感器、第二b胶温度传感器、第三混合头温度传感器连接,实时采集a胶、b胶原料温度及a胶、b胶混合后混合料温度的信号,为恒温精确控制提供设备侧反馈信号。
56.进一步的,本实用新型控制系统采用一主多从的网络拓扑架构,一个主站(工业pc主站)通过rj45网线线性连接多个从站,每个从站(ac1
‑
ac6伺服控制器)控制一个伺服电机。其工作原理为:工业pc用于运行上位机软件,提供人机交互界面,构建的ethercat实时工业pc主站作为系统主站模块,使用支持ethercat协议通信的埃斯顿proect
‑
08aeg
‑
ecd伺服驱动器作为从站模块。系统采用周期性过程数据通信模式。主站设置为dc模式,dc模式下主站本地时间以及所有从站设备的本地时钟时间均同步于参考时钟时间,保证了总线上各个设备的时间一致性。从站设置为同步于分布时钟同步信号模式,主站运行周期与从站sync信号周期相等。设置伺服电机运行模式为周期性同步位置运行模式。工业pc主站将输入位置控制数据进行预处理,工业pc主站的主站位置插补模块计算出的各个伺服电机的目标位置控制数据,主站协议栈负责将目标位置控制数据按照ethercat协议打包成ethercat报文形式,通过ethercat总线网络发送给各个从站(ac1
‑
ac6伺服控制器),ac1
‑
ac6伺服控制器对ethercat报文数据进行解析,将位置控制指令发送给伺服电机,驱动伺服电机运动到目标位置。
57.还有,本实用新型提及的清洗水泵、搅拌器、大桶搅拌、a胶加热、b胶加热等均为本领域现有技术,本实用新型未做介绍。
58.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型披露的技术范围内,根据本实用新型的技术方案及其构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

