1.本实用新型实施例涉及自动控制技术领域,尤其涉及一种无人机控制的切换装置和无人机。
背景技术:
2.无人机的飞行过程可以通过两种方式进行控制,一是通过遥控方式无线控制无人机飞行,二是无人机根据预先设置的航线自主飞行。
3.在实现本实用新型的过程中,实用新型人发现现有技术中存在以下技术问题:上述两种控制方式都要依赖于无人机飞控(即无人机中的飞行控制系统)进行数据处理,那么一旦无人机飞控出现故障,其将无法正常控制无人机,这可能会导致无人机出现失控坠毁等等无法安全飞行的情况。
技术实现要素:
4.本实用新型实施例提供了一种无人机控制的切换装置和无人机,解决了因无人机飞控出现故障而导致无人机无法安全飞行的问题。
5.第一方面,本实用新型实施例提供了一种无人机控制的切换装置,可包括:切换处理器和切换电路;其中,
6.切换处理器的使能信号输出端和切换电路的使能端电连接,切换处理器的控制信号输入端和切换电路的第一控制信号输出端电连接,切换处理器的控制信号输出端和切换电路的第一控制信号输入端电连接,切换处理器的切换信号输入端,用于和无人机中与遥控装置通信连接的信号接收装置的切换信号输出端电连接;切换电路的控制信号输入端,用于和信号接收装置的控制信号输出端电连接,切换电路的第二控制信号输出端,用于和无人机中的无人机飞控的控制信号输入端电连接,切换电路的第二控制信号输入端,用于和无人机飞控的控制信号输出端电连接,切换电路的控制信号输出端,用于和无人机的执行机构电连接。
7.可选的,上述切换装置,还可以包括:惯性传感器,其中,惯性传感器的姿态信号输出端和切换处理器的姿态信号输入端电连接。
8.可选的,切换处理器的控制信号输出端的数量是至少一个,切换电路的第一控制信号输入端的数量与切换处理器的控制信号输出端的数量相同;其中,各切换处理器的控制信号输出端和各切换电路的第一控制信号输入端一一对应电连接。
9.可选的,切换处理器的控制信号输入端包括sbus接口,切换处理器的控制信号输出端包括脉冲宽度调制接口。
10.第二方面,本实用新型实施例还提供了一种无人机,可包括:本实用新型任意实施例提供的无人机控制的切换装置。
11.可选的,上述无人机,还可以包括:执行机构、无人机飞控以及与遥控装置通信连接的信号接收装置;其中,切换处理器的切换信号输入端和信号接收装置的切换信号输出
端电连接,切换处理器的使能信号输出端和切换电路的使能端电连接,且切换处理器的控制信号输出端和切换电路的第一控制信号输入端电连接,切换处理器的控制信号输入端和切换电路的第一控制信号输出端电连接;切换电路的控制信号输入端和信号接收装置的控制信号输出端电连接,切换电路的第二控制信号输出端和无人机飞控的控制信号输入端电连接,切换电路的第二控制信号输入端和无人机飞控的控制信号输出端电连接,切换电路的控制信号输出端和执行机构电连接。
12.在此基础上,可选的,信号接收装置的切换信号输出端可以包括脉冲宽度调制接口。
13.在此基础上,可选的,无人机飞控的控制信号输出端的数量和切换电路的第二控制信号输入端的数量相同;其中,各无人机飞控的控制信号输出端和各切换电路的第二控制信号输入端一一对应电连接。
14.在此基础上,可选的,上述执行机构可以包括下述中的至少一个:电机、电调和舵机。
15.在此基础上,可选的,信号接收装置包括sbus接收机,且遥控装置包括基于sbus通信协议与sbus接收机通信连接的遥控器。
16.本实用新型实施例的技术方案,通过切换处理器的使能信号输出端和切换电路的使能端电连接,并且切换处理器的切换信号输入端,用于和无人机中与遥控装置通信连接的信号接收装置的切换信号输出端电连接,这使得切换电路可以根据切换处理器对来源于信号接收装置的切换信号进行处理后得到的使能信号确定自身的哪个控制信号输出端所在的通路开启;
17.另外,切换电路的控制信号输入端,用于和信号接收装置的控制信号输出端电连接,切换处理器的控制信号输入端和切换电路的第一控制信号输出端电连接,切换处理器的控制信号输出端和切换电路的第一控制信号输入端电连接,切换电路的控制信号输出端,用于和无人机的执行机构电连接,这使得当第一控制信号输出端所在的通路和第一控制信号输入端所在的通路开启时,切换处理器可以根据接收到的来源于信号接收装置的控制信号对执行机构进行控制,由此实现了基于切换处理器控制无人机飞行的效果;
18.切换电路的第二控制信号输出端,用于和无人机中的无人机飞控的控制信号输入端电连接,且无人机飞控的控制信号输出端和切换电路的第二控制信号输入端电连接,切换电路的控制信号输出端,用于和无人机的执行机构电连接,这使得当第二控制信号输出端所在的通路和第二控制信号输入端所在的通路均开启时,无人机飞控可根据接收到的来源于信号接收装置的控制信号来对执行机构进行控制,由此实现了基于无人机飞控控制无人机飞行的效果。
19.上述技术方案中的切换装置,电连接于无人机飞控和执行机构之间,其可通过各个端口相互配合,在控制无人机飞行过程中实现了基于切换处理器控制或是基于无人机飞控控制间的切换过程,这样一来,当无人机飞控出现故障后,可以由切换装置接管无人机,由此保证了无人机的时刻安全飞行的效果。
附图说明
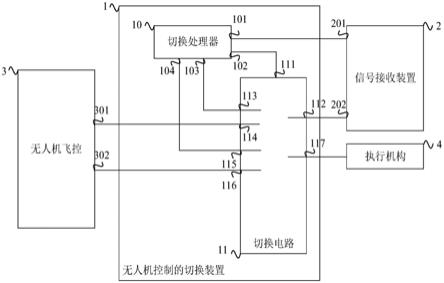
20.图1是本实用新型实施例一中的一种无人机控制的切换装置的结构示意图;
21.图2是本实用新型实施例一中的一种无人机控制的切换装置中可选示例的结构示意图;
22.图3是本实用新型实施例二中的一种无人机控制的切换装置的结构示意图;
23.图4是本实用新型实施例四中的一种无人机的结构示意图;
24.图5是本实用新型实施例四中的一种无人机的可选示例的结构示意图;
25.图6是本实用新型实施例四中的一种无人机的另一可选示例的结构示意图。
具体实施方式
26.下面结合附图和实施例对本实用新型作进一步详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本实用新型,而非对本实用新型的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本实用新型相关的部分而非全部结构。
27.实施例一
28.图1是本实用新型实施例一中提供的一种无人机控制的切换装置的结构示意图,需要说明的是,为了清楚描述出切换装置和其余装置之间的连接关系,在此将其余装置也绘制于图1中。本实施例可以适用于在无人机飞控出现故障时由该切换装置接管无人机飞控来控制无人机飞行的情况。参见图1,本实用新型实施例的切换装置1,可包括:切换处理器10和切换电路11;切换处理器10的使能信号输出端102和切换电路11的使能端111电连接,切换处理器10的控制信号输入端103和切换电路11的第一控制信号输出端113电连接,切换处理器10的控制信号输出端104和切换电路11的第一控制信号输入端115电连接;切换处理器10的切换信号输入端101,用于和无人机中的与遥控装置通信连接的信号接收装置2的切换信号输出端201电连接;切换电路11的控制信号输入端112,用于和信号接收装置2的控制信号输出端202电连接,切换电路11的第二控制信号输出端114,用于和无人机中无人机飞控3的控制信号输入端301电连接;切换电路11的第二控制信号输入端106,用于和无人机飞控3的控制信号输出端302电连接,切换电路的控制信号输出端107,用于和无人机的执行机构4电连接。
29.其中,切换处理器10至少可以包括切换信号输入端101、使能信号输出端102、控制信号输入端103和控制信号输出端104。具体的,切换处理器10的切换信号输入端101和信号接收装置2的切换信号输出端201电连接,由此,用于表示由无人机飞控3还是切换装置1控制无人机飞行的切换信号可以通过这一连接关系由信号接收装置2传输到切换处理器10,即切换处理器10可以读取到信号接收装置2发出的切换信号。
30.切换处理器10的使能信号输出端102和切换电路11的使能端111(en脚)电连接,由此,经由切换处理器10对读取到的切换信号进行处理后生成的使能信号可以通过这一连接关系由切换处理器10传输到切换电路11。实际应用中,可选的,使能信号可以是电压高低不同的电压信号,切换电路11根据接收到的使能信号可以确定开启自身的哪个控制信号输出端所在的通路来进行控制信号的传输。示例性的,低电压信号可以对应于开启第一控制信号输出端113所在的通路并且高电压信号可以对应于开启第二控制信号输出端114所在的通路,当然反之亦然可以,在此未做具体限定。需要说明的是,第一控制信号输入端115和第二控制信号输入端116的情况类似,第一控制信号输入端115和第一控制信号输出端113所在的通路是同时开启或是同时截断,且第二控制信号输入端116和第二控制信号输出端114
所在的通路也是同时开启或是同时截断。
31.切换处理器10的控制信号输入端103和切换电路11的第一控制信号输出端113电连接,由此,切换电路11可以通过这一连接关系将自身接收到的控制信号传输给切换处理器10,当然,这一信号传输的前提条件是本条通路已开启。切换处理器10在接收到控制信号后,其可以对该控制信号进行处理,示例性的,假设接收到的控制信号是sbus信号,sbus是无人机遥控中的一种通信协议,切换处理器10可以对其进行解析得到可用于控制执行机构的脉冲宽度调制(pulse width modulation,pwm)信号。类似的,切换处理器10的控制信号输出端104和切换电路11的第一控制信号输入端115电连接,由此,切换处理器10可以通过这一连接关系将自身解析后的控制信号输出给切换电路11。
32.切换电路11至少可以包括使能端111、控制信号输入端112、第一控制信号输出端113、第二控制信号输出端114、第一控制信号输入端115、第二控制信号输入端116和控制信号输出端117。具体的,切换电路11的控制信号输入端112和信号接收装置2的控制信号输出端202电连接,由此信号接收装置2可以通过这一连接关系将自身接收到的用于控制执行机构4运行的控制信号传输到切换电路11。
33.切换电路11的第二控制信号输出端114和无人机飞控3的控制信号输入端301电连接,切换电路11可以通过这一连接关系将自身接收到的控制信号传输给无人机飞控3,当然,这一信号传输的前提条件是本条通路已经开启。无人机飞控3在接收到该控制信号后,其可以对其进行处理,示例性的,假设接收到的控制信号是sbus信号,无人机飞控3可以对其进行解析得到可用于控制执行机构的pwm信号。当然,类似的,切换电路11的第二控制信号输入端116,用于和无人机飞控3的控制信号输出端电连接,无人机飞控3可以通过这一连接关系将自身解析后的控制信号传输给切换电路11。需要说明的是,切换电路11的控制信号输出端和执行机构电连接,这意味着切换电路11无论是从第一控制信号输入端115还是从第二控制信号输入端116接收到解析后的控制信号,其都可以将该解析后得控制信号传输至执行机构4,以便执行机构4根据解析后的控制信号控制无人机的飞行。
34.由上可知,切换电路11的控制信号输入端112与第一控制信号输出端113和第二控制信号输出端114间的关系就好似一个单刀双掷开关,即控制信号输入端112接收到的控制信号只能通过第一控制信号输出端113和第二控制信号输出端114中的一个端口进行输出,而且具体基于哪个端口进行输出则取决于切换电路11通过使能端111接收到的使能信号。当然,切换电路11的控制信号输出端117与第一控制信号输入端115和第二控制信号输入端116间的关系类似,在此不再赘述。即,上述切换装置中的控制信号的信号流有两条支路,一条支路是经由切换电路11的第一控制信号输出端113流入切换处理器10,然后经由切换电路11的第一控制信号输入端115再流回切换电路11,此时是由切换处理器10对执行机构4进行控制;另一条支路是经由切换电路11的第二控制信号输出端114流入无人机飞控3,然后经由切换电路11的第二控制信号输入端116再流回切换电路11,此时由无人机飞控3对执行机构4进行控制,即经由切换电路11的不同的控制信号输出端(113或是114)输出的控制信号意味着由不同的装置(无人机飞控3或是切换处理器10)来控制无人机的飞行。
35.本实用新型实施例的技术方案,通过切换处理器的使能信号输出端和切换电路的使能端电连接,并且切换处理器的切换信号输入端,用于和无人机中与遥控装置通信连接的信号接收装置的切换信号输出端电连接,这使得切换电路可以根据切换处理器对来源于
信号接收装置的切换信号进行处理后得到的使能信号确定自身的哪个控制信号输出端所在的通路开启;
36.另外,切换电路的控制信号输入端,用于和信号接收装置的控制信号输出端电连接,切换处理器的控制信号输入端和切换电路的第一控制信号输出端电连接,切换处理器的控制信号输出端和切换电路的第一控制信号输入端电连接,切换电路的控制信号输出端,用于和无人机的执行机构电连接,这使得当第一控制信号输出端所在的通路和第一控制信号输入端所在的通路开启时,切换处理器可以根据接收到的来源于信号接收装置的控制信号对执行机构进行控制,由此实现了基于切换处理器控制无人机飞行的效果;
37.切换电路的第二控制信号输出端,用于和无人机中的无人机飞控的控制信号输入端电连接,且无人机飞控的控制信号输出端和切换电路的第二控制信号输入端电连接,切换电路的控制信号输出端,用于和无人机的执行机构电连接,这使得当第二控制信号输出端所在的通路和第二控制信号输入端所在的通路均开启时,无人机飞控可根据接收到的来源于信号接收装置的控制信号来对执行机构进行控制,由此实现了基于无人机飞控控制无人机飞行的效果。
38.上述技术方案中的切换装置,电连接于无人机飞控和执行机构之间,其可通过各个端口相互配合,在控制无人机飞行过程中实现了基于切换处理器控制或是基于无人机飞控控制间的切换过程,这样一来,当无人机飞控出现故障后,可以由切换装置接管无人机,由此保证了无人机的时刻安全飞行的效果。
39.在上述各技术方案的基础上,可选的,参见图2,切换处理器10的控制信号输出端104的数量是至少一个,且切换电路11的第一控制信号输入端115的数量与切换处理器10的控制信号输出端104的数量相同;其中各切换处理器10的控制信号输出端104和各切换电路11的第一控制信号输入端115一一对应电连接。其中,无人机的飞行控制可能需要通过至少一个执行机构4的相互配合实现,而用于控制每个执行机构4的控制信号可能存在差异性,示例性的,执行机构4可能是电机、电调、舵机等等,其中电调可以是用于控制电机转速的执行机构4,舵机可以是用于控制飞机角度的执行机构4,显然它们需要的控制信号存在差异,而且每个类型的执行机构4的数量可能是一个、两个或者是多个。因此,切换处理器10的控制信号输出端104的数量和执行机构4的数量一致,且二者通过切换电路11的第一控制信号输入端115间接的一一对应连接,由此一来,切换处理器10的每个控制信号输出端104可分别输出一路控制信号,而且各路控制信号通过一一对应的电连接关系可以传输到相应的执行机构4中,由此实现了基于切换处理器10对各个执行机构4的准确控制的效果。
40.在上述各技术方案的基础上,可选的,切换处理器10的控制信号输入端103可以包括sbus接口,即经由控制信号输入端103输入到切换处理器10中的控制信号可以是sbus信号;切换处理器10的控制信号输出端104可以包括脉冲宽度调制接口,即经由控制信号输出端104输出到执行机构4中的控制信号可以是脉冲宽度调制信号,其可以是切换处理器10对sbus信号进行解析后得到的信号。
41.实施例二
42.图3是本实用新型实施例二中提供的一种无人机控制的切换装置的结构示意图。本实施例以上述各技术方案为基础进行优化,未在本实施例中详尽描述的细节可参见上述实施例,在此不再赘述。在本实施例中,可选的,参见图3,上述切换装置1,还可以包括:惯性
传感器12,其中,惯性传感器12的姿态信号输出端121和切换处理器10的姿态信号输入端105电连接。具体的,惯性传感器12(inertial measurement unit,imu)也可以称为惯性测量单元,其可以是陀螺仪和加速计的综合体,用于测量无人机的姿态。因此,当惯性传感器12的姿态信号输出端121和切换电路11的姿态信号输入端105电连接时,惯性传感器12可以将自身测量到的姿态信号输出给切换电路11,以便切换电路11对该姿态信号进行解析,并将姿态信号的解析结果和控制信号的解析结果进行融合,由此得到了能够控制无人机进行增稳飞行的控制信号,这适合于让不会控制无人机的用户也能轻松控制无人机。
43.实施例三
44.本实用新型实施例三中提供的一种无人机,可以包括上述各技术方案所述的任一无人机控制的切换装置,其可适用于在无人机飞控出现故障时由该切换装置接管无人机飞控来控制无人机飞行的情况。本实施例中的切换装置的具体细节已在上文中进行详细阐述,在此不再赘述。本实施例的技术方案,在控制无人机飞行过程中实现了基于切换处理器控制或是基于无人机飞控控制之间的切换过程,这样一来,当无人机飞控出现故障后,可以由切换装置接管无人机,由此保证了无人机的时刻安全飞行的效果。
45.实施例四
46.图4是本实用新型实施例二中提供的一种无人机的结构示意图。本实施例以上述各技术方案为基础进行优化,未在本实施例中详尽描述的细节可以参见上述实施例,在此不再赘述。在本实施例中,可选的,参见图4,上述无人机,还可以包括:执行机构4、无人机飞控3以及与遥控装置通信连接的信号接收装置2;其中,切换处理器10的切换信号输入端101和信号接收装置2的切换信号输出端201电连接,切换处理器10的使能信号输出端102和切换电路11的使能端111电连接,切换处理器10的控制信号输出端104和切换电路11的第一控制信号输入端115电连接,切换处理器10的控制信号输入端103和切换电路11的第一控制信号输出端113电连接;切换电路11的控制信号输入端112,用于和信号接收装置2的控制信号输出端202电连接,切换电路11的第二控制信号输出端114和无人机飞控3的控制信号输入端301电连接,切换电路11的第二控制信号输入端116和无人机飞控3的控制信号输出端302电连接,切换电路11的控制信号输出端117和执行机构4电连接。
47.本实用新型实施例的技术方案,通过无人机中的各端口相互配合,在控制无人机飞行过程中实现了基于切换处理器控制或是基于无人机飞控控制之间的切换过程,这样一来,当无人机飞控出现故障后,可以由切换装置接管无人机,由此保证了无人机的时刻安全飞行的效果。
48.在上述各技术方案的基础上,可选的,信号接收装置2的切换信号输出端201包括脉冲宽度调制接口,也就是说经由信号接收装置2的切换信号输出端201输出的切换信号可以是脉冲宽度调制信号。
49.在上述各个技术方案的基础上,可选的,无人机飞控3的控制信号输出端302的数量和切换电路11的第二控制信号输入端116的数量相同;其中,各无人机飞控3的控制信号输出端302和各切换电路11的第二控制信号输入端116一一对应电连接。无人机的飞行控制可能是需要通过一个、两个或是多个执行机构4的相互配合来实现,而且用于控制每个执行机构4的控制信号可能存在差异性,示例性的,执行机构4可能是电机、电调、舵机等等,其中电调可以是用于控制电机转速的执行机构4,舵机可以是用于控制飞机角度的执行机构4,
显然它们需要的控制信号存在差异,而且每个类型的执行机构4的数量可能是一个、两个或多个。因此,无人机飞控3的控制信号输出端的数量和执行机构4的数量相同,而且二者可以通过切换电路11的第二控制信号输入端116间接的一一对应电连接,由此一来,无人机飞控3的每个控制信号输出端可以分别输出一路控制信号,而且各路控制信号通过一一对应的电连接关系可以传输到相应的执行机构4中,由此实现了基于无人机飞控对各个执行机构的准确控制的效果。
50.在上述各技术方案的基础上,可选的,信号接收装置2可以包括具有sbus通信功能的sbus接收机;遥控装置可以是基于sbus通信协议与sbus接收机通信连接的遥控器。本实用新型实施例中的遥控装置可以包括两种通信协议,一是sbus总线通信协议,其可以基于一根线实现遥控装置上多个开关信号的传输,即一根线对应于遥控装置上的多个开关;二是对于pwm信号是一根线对应于遥控装置上的一个开关,当pwm信号发生变化时,切换处理器10根据接收到的pwm信号确定是对哪些通路进行切换,即pwm信号只是一个触发信号,具体切换到哪些通路是由切换处理器10确定的,该切换过程可以是由无人机飞控3对sbus信号进行解析并将解析到的pwm信号进行输出切换为由切换处理器10对sbus信号进行解析并将解析到的pwm信号进行输出,当然,反之亦然可以。这两种通信协议相互配合,可以根据pwm信号直接确定是否进行通路切换,由此避免了对sbus信号的无效解析,操作实用性更强。
51.在上述各个技术方案的基础上,为了更好地理解无人机飞行的控制过程,下面结合具体示例对其进行示例性的说明。示例性的,遥控装置可以通过一个三段开关发出abc三种pwm信号,其中,pwm信号a可以切换成由无人机飞控控制无人机,pwm信号b可以切换成由切换装置手动模式控制无人机,pwm信号c可切换成由切换装置增稳模式控制无人机。
52.具体的,针对由无人机飞控来控制无人机飞行的情况,参见图5:
53.1、由遥控装置给信号接收装置发送pwm信号a。
54.2、切换处理器接收pwm信号a并向切换电路发送对应的使能信号。
55.3、切换电路将执行机构切换到由无人机飞控的pwm信号控制,此时信号接收装置的sbus信号接入无人机飞控实现遥控装置与无人机飞控的通信。
56.4、这时无人机是完全由无人机飞控控制飞行的。
57.针对无人机飞控出现故障时切换成由切换装置来控制无人机飞行的情况,参见图6:
58.第一种、手动飞行模式:
59.1、由遥控装置给信号接收装置发送pwm信号b。
60.2、切换处理器接收pwm信号b并向切换电路发送对应的使能信号。
61.3、切换电路将执行机构切换到由切换模块的pwm信号控制,此时信号接收装置机的sbus信号也切换连接到切换处理器。
62.4、切换处理器将接收到的sbus信号解析成多路pwm信号来控制执行机构,从而实现遥控手动模式控制无人机飞行。
63.第二种、增稳飞行模式:
64.1、由遥控装置给信号接收装置发送pwm信号c。
65.2、切换处理器接收pwm信号c并向切换电路发送对应的使能信号。
66.3、切换电路将执行机构切换到由切换模块的pwm信号控制,此时信号接收装置机的sbus信号也切换连接到切换处理器。
67.4、切换处理器读取并处理imu传输来的姿态信号。
68.6、切换处理器通过同时处理姿态信号和sbus信号,输出多路pwm信号来控制执行机构,从而实现遥控增稳模式控制无人机飞行。
69.注意,上述仅为本实用新型的较佳实施例及所运用技术原理。本领域技术人员会理解,本实用新型不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本实用新型的保护范围。因此,虽然通过以上实施例对本实用新型进行了较为详细的说明,但是本实用新型不仅仅限于以上实施例,在不脱离本实用新型构思的情况下,还可以包括更多其他等效实施例,而本实用新型的范围由所附的权利要求范围决定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

