1.本实用新型属于物联网技术领域,尤其涉及一种多传感器融合的沥青混凝土拌合场装载机智能驾驶系统。
背景技术:
2.由于养护施工作业驾驶员劳动强度大,安全性和舒适性差。强烈的振动、轰鸣的噪声、飞扬的尘埃粉末、高温环境、甚至突如其来的意外严重危及驾驶员的身心健康乃至生命。目前养护公司业务快速发展,近几年来拌和厂标准化已初步实现,基地智能化主要的方式有遥控驾驶装载机进行上卸料,来减轻驾驶员的工作量,但一个驾驶员只能操控一辆装载机,不能长时间持续作业,未能从根本上解决问题。仅仅是将操控地点从驾驶室搬到了驾驶室外,依然需要远程遥控驾驶,且操控距离过远会导致传输延迟、视野不佳,原材料生产智能化不足、原有劳动力不能得到有效地释放,现有操控手大多为原有装载机操作手师傅,在不能减轻工作量的情况下,也降低了工作效率。
技术实现要素:
3.本实用新型的目的是提供一种多传感器融合的沥青混凝土拌合场装载机智能驾驶系统,以解决现有拌合场生产工作环境恶劣,操作手劳动强度大,专业劳动力短缺的问题,并通过提高装载机的生产自动化及智能化,降低装载机上卸料操作难度,提高生产效率。
4.为了达到上述目的,本实用新型的技术解决方案是:一种多传感器融合的沥青混凝土拌合场装载机智能驾驶系统,用于混凝土拌合场自动化上卸料,所述沥青混凝土拌合场装载机包括刹车油门控制装置、前进后退控制装置、动臂控制装置、铲斗控制装置和转向控制装置,它包括:
5.第一处理器;
6.plc控制器,所述刹车油门控制装置、前进后退控制装置、动臂控制装置、铲斗控制装置、转向控制装置均与所述plc控制器相连,根据所述plc控制器下发的控制指令,进行机械控制;
7.用于采集装载机正前方图像的第一摄像机,所述第一摄像机将图像传递给所述第一处理器;
8.用于采集装载机左侧图像的第二摄像机,所述第二摄像机将图像传递给所述第一处理器;
9.用于采集装载机正后方图像的第三摄像机,所述第三摄像机将图像传递给所述第一处理器;
10.用于采集装载机右侧图像的第四摄像机,所述第四摄像机将图像传递给所述第一处理器;
11.用于采集拌合楼三维信息的多线程激光雷达,所述多线程激光雷达将三维信息传
递给所述第一处理器;
12.用于采集装载机正前方障碍物距离信息的第一单线激光雷达,所述第一单线激光雷达将障碍物距离信息传递给所述第一处理器;
13.用于采集装载机正后方障碍物距离信息的第二单线激光雷达,所述第二单线激光雷达将障碍物距离信息传递给所述第一处理器;
14.第二处理器,所述第二处理器分别与所述plc控制器和所述第一处理器相连;
15.云端服务器,所述云端服务器与所述第二处理器相连。
16.进一步地,所述第一、第二单线激光雷达的视角为水平的180
°
。
17.进一步地,所述刹车油门控制装置安装在驾驶室刹车油门侧边;所述前进后退控制装置安装在驾驶室档位控制内侧;所述动臂控制装置安装在驾驶室操作杆下侧;所述铲斗控制装置安装在铲斗操作杆下侧;所述转向控制装置安装在方向盘内侧。
18.进一步地,所述多线程激光雷达安装在装载机顶部;所述第一摄像机安装在装载机顶部正前方;所述第二摄像机安装在装载机顶部正左侧;所述第三摄像机安装在装载机顶部正后方;所述第四摄像机安装在装载机顶部正右方;所述第一单线激光雷达安装在装载机距离地面预定距离的正前方;所述第二单线激光雷达安装在装载机距离地面预定距离的正后侧。
19.进一步地,所述第一单线激光雷达安装在装载机距离地面一米的正前方;所述第二单线激光雷达安装在装载机距离地面一米的正后侧。
20.进一步地,所述plc控制器安装在装载机后侧控制箱内;所述第一处理器安装在装载机后侧控制箱内;所述第二处理器安装在装载机后侧控制箱内。
21.根据以上技术方案,本实用新型的有益效果如下:本实用新型通过多个摄像机获取不同角度的图像,通过多线程激光雷达采集拌合楼三维信息,通过多个单线激光雷达采集装载机附近障碍物距离信息,控制装载机内装置达到自动上卸料的功能,从而提高工作生产效率及安全性。
附图说明
22.构成本技术的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
23.图1为本实用新型实施例中转向控制装置的立体结构示意图;
24.图2为本实用新型实施例中转向控制装置的局部剖视结构示意图;
25.图3为本实用新型实施例中转向控制装置中第一电控模组的结构示意图;
26.图4为本实用新型实施例中刹车油门控制装置的立体结构示意图;
27.图5为本实用新型实施例中刹车油门控制装置的剖视结构示意图;
28.图6为本实用新型实施例中刹车控制装置的立体结构示意图;
29.图7为本实用新型实施例中刹车控制装置的剖视结构示意图;
30.图8为本实用新型实施例中连接轴头的立体结构示意图;
31.图9为本实用新型实施例中连接轴头的剖视结构示意图;
32.图10为本实用新型实施例中前进后退控制装置的结构示意图;
33.图11为本实用新型实施例中前进后退控制装置的局部剖视示意图;
34.图12为本实用新型实施例中铲斗控制装置的立体结构示意图;
35.图13为本实用新型实施例中铲斗控制装置的局部放大结构示意图;
36.图14为本实用新型实施例中动臂控制装置的立体结构示意图;
37.图15为本实用新型实施例中第五电控模组的立体结构示意图;
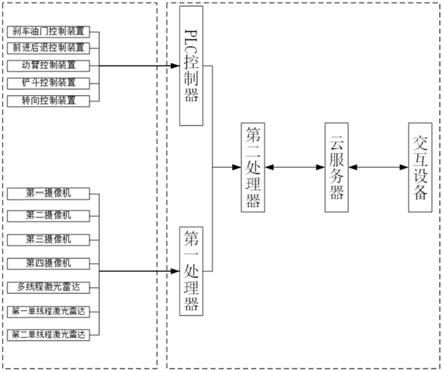
38.图16为本实用新型实施例中多传感器融合的沥青混凝土拌合场装载机智能驾驶系统的系统框图;
39.图17为本实用新型实施例中多传感器融合的沥青混凝土拌合场装载机智能驾驶系统的安装示意图。
具体实施方式
40.为了方便本领域技术人员的理解,下面结合实例图与附图对本实用新型作进一步说明,实施方式提及的内容并非对本实用新型的限定。
41.本实用新型实施例提供一种多传感器融合的沥青混凝土拌合场装载机智能驾驶系统,用于混凝土拌合场自动化上卸料,所述沥青混凝土拌合场装载机包括刹车油门控制装置、前进后退控制装置、动臂控制装置、铲斗控制装置和转向控制装置,首先对刹车油门控制装置、前进后退控制装置、动臂控制装置、铲斗控制装置和转向控制装置进行介绍。
42.参考图1
‑
图3,所述转向控制装置包括转向装置与用于控制该转向机构的第一电控模组,该转向装置包括方向盘201,与方向盘201相连的转向轴202,连接于转向轴202底部的转向控制阀203,该转向控制阀203与液压传动机构相连以控制装载机进行转向,该第一电控模组包括第一电机204,与第一电机204相连的第一减速器205,与第一减速器205相连的第一电磁离合器,第一电磁离合器的输出轴上套接有从动齿轮206,转向轴202上套接有转向齿轮207,转向齿轮207与该从动齿轮206相啮合,当处于电控模式中时,第一电磁离合器吸合,第一电机204驱动从动齿轮206旋转,从动齿轮206带动套接于转向轴202上的转向齿轮207旋转从而起到了转向效果,当处于手动模式时第一电磁离合器断开,转向装置与第一电控模组断开,此时手动操作方向盘201即可无阻碍的控制装载机进行转向。
43.参考图4和图5,所述刹车油门控制装置包括踏板装置、能够对油门进行线性电控的第二电控模组以及用于检测油门幅度的第一检测装置,该油门踏板302装置包括油门安装座301,底部铰接于油门安装座301上的油门踏板302,油门踏板302斜向放置与油门安装座301上,油门踏板302底端设有竖向穿设于油门安装座301内的油门活动柱303,油门活动柱303与引擎节气门连接,通过踩下油门踏板302控制油门活动柱303的压下幅度即可控制节气门的开合度从而达到控制装载机输出功率的效果。
44.该第二电控模组包括第二电机304,与第二电机304相连的第二减速器305,与第二减速器305相连的第二电磁离合器306,与第二电磁离合器306输出轴相连的拨杆307,该拨杆307布置于油门踏板302一侧,该拨杆307呈镰刀形,拨杆307中设有与该拨杆307形状适配的弧形通槽308,该油门踏板302底部固定有朝拨杆307方向横向伸出的凸杆309,该凸杆309伸入该弧形腰孔内,凸杆309端部设有直径大于弧形腰孔宽度的限位凸起310。该第一检测装置包括第一角度传感器311,该第一角度传感器311具有与第一离合器输出轴固定连接的第一检测轴,当第一检测轴检测到离合器输出轴旋转到预定位置时即可输出信号停止第二
电机304以及断开第二电磁离合器306。
45.采用上述结构,当处于电控模式时,第二电磁离合器306吸合,电机驱动拨杆307进行转动,拨杆307在转动时带动凸杆309在腰孔内滑动,由于腰孔呈弧形,因此凸杆309的运动路径为一个弧形,故能带动与凸杆309相接的油门踏板302进行旋转,起到了油门控制的作用,由于油门踏板302旋转时是通过凸杆309在通槽内滑动进行控制的,通过采用线性的摇杆以精确的控制电机的旋转角度,即可达到精密操作的功能,当处于手动模式时,第二电磁离合器306松开,该拨杆307即可断开与电机的配合连接能够自由的进行旋转,此时第二电控装置将不再阻碍油门踏板302的手动操作,从而能够顺利的实现手动控制。
46.参考图6
‑
9,所述刹车控制装置包括刹车装置、能够电动控制该刹车装置进行刹车操作的第三电控模组以及用于检测刹车踏板403运动幅度的第二检测装置,该刹车装置包括刹车安装座401,通过刹车轴402铰接与刹车安装座401上的刹车踏板403,该刹车踏板403斜置于刹车安装座401上,该刹车踏板403下方设有竖向穿设于刹车安装座401内的刹车活动柱404,该刹车活动柱404与制动机构相连,该刹车踏板403在被踩下时能够顺势压下刹车活动柱404激活制动机构进行刹车动作。
47.该第三电控模组包括第三电机405,与第三电机405相连的第三减速器406,该刹车安装座401在刹车轴402的轴向侧处设有一块竖直放置的安装板407,该安装板407上设有对应该刹车轴402位置的开孔704,减速器的输出轴伸入开孔704内并与刹车轴402通过第一连接筒408配合连接。
48.该第一连接筒408中设有通孔409,该通孔409具有一个呈圆柱形的内表面,该内表面上设有沿径向向外延伸的两个对置的扇形槽410,该刹车轴402面对第一连接筒408的一端设有连接轴头411,该连接轴头411具有与凹腔内表面相匹配的圆柱体部412以及与该扇形槽410适配的两条对置凸起筋413,该凸起筋413的宽度小于该扇形槽410的宽度,从而使得连接轴头411能够在该连接筒内有限度的进行旋转,该蜗杆减速器的输出轴上设有与该通孔409形状相适配的轴套,该轴套伸入第一连接筒408内且能够带动第一连接筒408旋转,当刹车踏板403处于起始位置时,该凸起筋413位于该扇形槽410内的行程起点位置处。
49.该第二检测装置包括第二角度传感器417,该第二角度传感器417设于刹车轴402背对于第一连接筒408的一端,该第二角度传感器417具有伸入刹车轴402内并与之固定的第二检测轴,当第二检测轴检测到刹车轴402旋转了预定位置就能输出信号关闭电机,为了进一步提高精确性和保险性,该第一连接筒408侧壁上设有挡板414,该安装板407于该挡板414的旋转行程起点处和终点处各设有一个挡块415,两边挡块415上各自设有一个接近开关416,当挡板414靠近该接近开关416时候接近开关416能够输出信号关闭电机。
50.该电控刹车机构在处于手动操作模式时,用脚踩下刹车踏板403,该刹车轴402顺着刹车踏板403的旋转方向旋转,由于第一连通筒的存在,轴套上的凸起筋413可以在扇形槽410内自从的运动而不会因而加装了电控模组而受到阻碍,当处于电控模式时,通过输出轴旋转连接筒,连接筒直接带动处于扇形槽410内行程起点位置处的刹车轴402旋转,带动刹车踏板403压下,当需要解除刹车制动时,刹车活动柱404推动刹车踏板403回弹,驱动刹车柱朝反方向旋转使刹车轴402上的凸起筋413再次归位于扇形槽410内的行程起点位置,从而实现了刹车的电动控制。
51.参考图10和图11,所述前进后退控制装置包括换挡装置与用于驱动该换挡装置的
第四电控模组以及用于检测运动幅度的第三检测装置,该换挡装置包括换挡拨杆501,固定于换挡拨杆501底部的换挡转轴502,与换挡转轴502连接的齿轮拉线箱503,该齿轮拉线箱503中设有与换挡转轴502固定连接的齿轮和与齿轮啮合的拉线504,该拉线504能够在齿轮的带动下移动,该拉线504伸入变速器波箱中的换挡传动组件内,该第四电控模组包括第四电机505、与第四电机505相连的第四减速器506,与第四减速器506相连的第三电磁离合器507,该第三电磁离合器507的输出轴与换挡转轴502的一端固定连接,该第三检测装置包括设于该换挡转轴502另一端的第三角度传感器508,该第三角度传感器508具有与该换挡转轴502固定连接的检测轴,该电控换挡机构500运动时,当处于电控模式下时,第三电磁离合器507吸合,第三电磁离合器507的输出轴驱动换挡转轴502进行旋转,换挡转轴502驱动拉线504拉动变速器波箱内的换挡传动组件进行换挡,角度传感器实时检测换挡转轴502的旋转角度,当检测到换挡转轴502旋转至预定位置时即输出信号断开离合器,达到精准控制换挡的效果,当处于手动模式下时,断开第三电磁离合器507,手动操控换挡拨杆501即可不受换挡电控模组阻碍的驱动拉线504进行换挡。
52.参考图12
‑
15,所述铲斗控制装置包括铲斗操作装置以及能够电动控制该铲斗操作装置进行铲斗操作的第五电控模组以及检测铲斗运转幅度的第四检测装置,该铲斗操作装置包括铲斗安装座601,固定于铲斗安装座内的多路阀602,还包括操作杆603,设于操作杆603底部的凸轮604,该凸轮604一端铰接于固定轴605上,另一端与阀芯606铰接,该阀芯606竖直向下伸入该多路阀602内,该多路阀602内设有能够被阀芯606带动的液压传动机构,该固定轴605安装于多路阀602顶部,使用时拨动操作杆603即可实现阀芯606的往复运动,阀芯606带动多路阀602里的液压传动机构对铲斗进行操控,实现装载机铲斗的收放,控制铲斗的收放。
53.参考图12
‑
15,所述动臂控制装置包括动臂操作装置以及能够电动控制该动臂操作装置进行动臂操作的第五电控模组以及检测铲斗运转幅度的第四检测装置,该动臂操作装置与铲斗控制装置基本类似,包括动臂安装座601,固定于动臂安装座内的多路阀602,还包括操作杆603,实现装载机动臂的升降,控制动臂的升降,以实现铲斗的完整动作。
54.该第五电控模组包括用于驱动操作杆603的第五电机607,与第五电机607相连的用于转速匹配的第五减速器608,与第五减速器608的输出端相连的第四电磁离合器613,与第四电磁离合器613输出轴相连的驱动轮,该驱动轮上设有偏心凸杆309,该驱动轮通过偏心凸杆309与第一连杆铰接,该第一连杆通过阀芯轴与阀芯606铰接。
55.该第四检测装置包括第四角度传感器,与第四角度传感器的检测轴相接的从动轮614,该从动轮614与该驱动轮对置布置且大小形状相等,从动轮614与该驱动轮之前通过偏心凸轮604固定连接,从而在该驱动轮旋转时从动轮614也能随之进行旋转,进而驱动使得检测轴能够检测到角度变化,当角度传感器检测到驱动轮旋转至预定位置后,即可输出信号停止电机。
56.参考图16,本实用新型实施例提供一种多传感器融合的沥青混凝土拌合场装载机智能驾驶系统,可以包括:多线程激光雷达1、第一摄像机2、第二摄像机8、第三摄像机3、第四摄像机9、第一单线激光雷达7、第二单线激光雷达6、plc控制器5、第一处理器10、第二处理器11和云端服务器;所述刹车油门控制装置、前进后退控制装置、动臂控制装置、铲斗控制装置、转向控制装置均与所述plc控制器相连,根据所述plc控制器下发的控制指令,进行
机械控制;
57.所述第一摄像机用于采集装载机正前方图像,将图像传递给所述第一处理器;
58.所述第二摄像机采集装载机左侧图像,将图像传递给所述第一处理器;
59.所述第三摄像机用于采集装载机正后方图像,将图像传递给所述第一处理器;
60.所述第四摄像机用于采集装载机右侧图像,将图像传递给所述第一处理器;
61.所述多线程激光雷达用于采集拌合楼三维信息,将三维信息传递给所述第一处理器;
62.所述第一单线激光雷达用于采集装载机正前方障碍物距离信息,将障碍物距离信息传递给所述第一处理器;
63.所述第二单线激光雷达用于采集装载机正后方障碍物距离信息,将障碍物距离信息传递给所述第一处理器;
64.所述第二处理器分别与所述plc控制器和所述第一处理器相连;所述云端服务器与所述第二处理器相连。
65.具体地,参考图17,所述刹车油门控制装置安装在驾驶室4刹车油门侧边,前进后退控制装置安装在驾驶室4档位控制内侧,动臂控制装置安装在驾驶室4操作杆下侧;铲斗控制装置安装在铲斗操作杆下侧;转向控制装置安装在方向盘内侧;多线程激光雷达1安装在装载机顶部;第一摄像机2安装在装载机顶部正前方;第二摄像机8安装在装载机顶部正左侧;第三摄像机3安装在装载机顶部正后方;第四摄像机9安装在装载机顶部正右方;第一单线激光雷达7安装在装载机距离地面一米的正前方;第二单线激光雷达6安装在装载机距离地面一米的正后侧;plc控制器5安装在装载机后侧控制箱内;第一处理器10安装在装载机后侧控制箱内;第二处理器11安装在装载机后侧控制箱内;刹车油门控制装置、前进后退控制装置、动臂控制装置、铲斗控制装置、转向控制装置通过plc控制器5下发指令控制,对装载机进行机械控制;所述多线程激光雷达1、第一摄像机2、第二摄像机8、第三摄像机3、第四摄像机9、第一单线激光雷达7和第二单线激光雷达6通过poe与第一处理器进行连接,第一处理器10与plc控制器5输出端与第二处理器11输入端连接,第二处理器11与云服务器相连。
66.本实施例中,所述多线程激光雷达1可以采用深圳速腾rs
‑
lidar
‑
16,但不限于此;第一摄像机2、第二摄像机8、第三摄像机3、第四摄像机9可以采用海康威视ds
‑
2cd3t87wd
‑
l 4mm,但不限于此;第一处理器10可以采用基于英伟达jetson agx xavier芯片的米文动力工控机,但不限于此;第二处理器11可以采用拿铁熊猫工控机,但不限于此;第一单线激光雷达7和第二单线激光雷达6可以采用witty wr lidar,但不限于此。
67.上述的多传感器融合的沥青混凝土拌合场装载机智能驾驶系统的具体工作步骤如下:
68.1、数据获取:通过安装在装载机顶部的多线程激光扫描雷达对拌合场去进行三维扫描,数据接入第一处理器进行处理,多线程激光扫描在移动中获取当前位置信息及墙体、料仓料斗的距离;通过安装在装载机顶部的第一摄像机、第二摄像机、第三摄像机、第四摄像机实时获取装载机周边的图像信息;通过安装在装载机前后端的第一单线激光雷达和第二单线激光雷达获取障碍物的实时位置信息。
69.2、数据收集和传输:步骤1中7个传感器测得的3项数据指标分别位置信息、图像信
息、距离信息,数据接入第一处理器(ndt点云配准、yolov4检测),通过线缆、集成控制网关传输至第二处理器。
70.3、数据处理:第二处理器对所有传感器数据结果进行处理(slam识别、规划控制),高效率控制装载机实时智能化作业。
71.4、数据展示:人机交互设备实时展现由第二处理器收集处理后的装载机实施自动化作业数据,并上传到云端服务器,让施工单位、业主单位、监理单位可以实时查看当前的作业状态,实现拌合场施工高效安全的作业。
72.所述的展示是装载机在沥青混凝土拌合场的实时施工数据以实时图像、机械控制数据、当前位置、当前速度、障碍物信息数据等形式,展现在人机交互设备上,用户可以随时查看,进行装载机自动化施工的全过程监控。
73.本实用新型的具体应用途径很多,以上所述仅是本实用新型的优选实施方式,应该指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以作出若干改进,这些改进也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

