1.本发明涉及航天器姿态控制技术领域,具体地,涉及一种深空探测器星敏感器自主切换方法。
背景技术:
2.深空探测器飞行过程包括脱离地球引力、进入巡航轨道或进入星地间转移轨道以及再入行星、绕飞行星,经历的空间环境变化巨大。探测器需多次变轨,分别绕行地球、太阳、目标天体飞行,且与目标天体的距离时刻变化。不同于常规地球卫星的姿控系统运行在稳定的对地模式,探测器需根据任务的需求,在对日、对地、对目标天体等多种目标姿态间进行切换,执行相应的姿态机动。深空探测器的星敏感器极易受到太阳、目标天体以及目标天体卫星的干扰,造成姿态输出数据错误,影响任务成败。目前星敏感器工作状态的识别主要采用单机自身对星空图像的处理,根据识别出有效导航星的数量来判断。
3.经过检索,专利文献cn104061928a公开了一种自主择优使用星敏感器信息的方法,包括以下步骤:对所有星敏感器分别进行自检信息判断、星敏感器输出信息与预估值一致性判断以及星敏感器之间的一致性判断,当星敏感器同时满足上述三个判断时,标记为有效星敏感器,否则为无效星敏感器;将上述有效星敏感器的时标统一到同一个时标下;并计算上述有效星敏感器两两之间测量的光轴、横轴矢量夹角与相应标称夹角的误差,根据误差的大小,给星敏感器记分;根据星敏感器的分数对星敏感器进行排序,若出现星敏感器分数相同,则进一步考虑分数相同星敏感器的遮光性能满足裕度、星敏感器之间光轴夹角标称大小进行排序;根据工程需要,按照排序顺序选择星敏感器信息。该现有技术依靠星敏单机自身对星图的识别能力,在外部环境有不确定干扰,如天体遮挡、太阳强光照射等因素时,星敏自身难以保证作出正确识别。
4.专利文献cn107765699a公开了一种地球静止轨道卫星具有筒形遮光罩相机实时阳光规避方法,包括如下步骤:步骤一、根据轨道信息计算太阳方向与轨道坐标系z轴之间的夹角β,以及优化前的阳光规避偏置角;步骤二、确定抛物线a的轨迹:若da>0,则a=ax2 bx;否则,a保持不变;其中,抛物线自变量x=α δ
‑
β;δ表示选取的规避余量角,a、b分别表示抛物线系数;步骤三、计算优化后的相机安全角τ;步骤四、根据步骤三中计算出来的优化后的相机安全角τ,计算优化后的阳光规避偏置角。该现有技术仅适用于卫星工作在固定姿态基准的状态,如始终保持对地时才能进行阳光规避偏置角的设计,并无法适应姿态机动、模式切换的情况。
5.肖红光、李伟、刘京等在“基于光线跟踪的星敏感器视场仿真分析”(系统仿真学报,2014,26(11))中,设计了一套星敏在轨视场遮挡情况模拟系统,在系统中可以通过添加航天器三维模型以及轨道场景,输出星敏视场内所见的图像。但该方法仅能用于航天器前期星敏布局设计,无法在星上实时计算。
6.因此,亟需研发设计一种能够利用探测器轨道和当前探测姿态实时计算各星敏受太阳照射、受目标天体遮挡情况的系统及方法。
技术实现要素:
7.针对现有技术中的缺陷,本发明的目的是提供一种深空探测器星敏感器自主切换方法,本发明根据工作环境进行星敏切换,用于深空探测器自主选择最优的姿态基准单机,防止错误姿态数据引入控制系统。
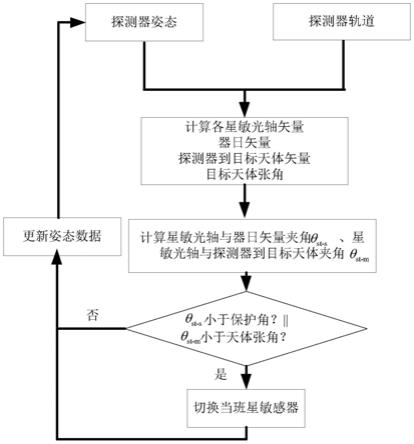
8.根据本发明提供的一种深空探测器星敏感器自主切换方法,利用探测器轨道数据和当前探测器姿态数据,实时计算各星敏光轴矢量、器日矢量、探测器到目标天体矢量和目标天体张角,获取星敏光轴矢量与器日矢量夹角以及星敏光轴受目标天体遮挡情况的星敏数据;如果星敏数据可用,则继续使用当班星敏感器;如果星敏数据不可用,则更新姿态数据切换星敏感器;
9.星敏光轴矢量是指星敏镜头指向的方向的量;器日矢量是指深空探测器与太阳的连线,深空探测器指向太阳的方向的量;探测器到目标天体矢量是指深空探测器到目标天体的连线,深空探测器指向目标天体的方向的量;目标天体张角是指站在深空探测器所在位置看目标天体,目标天体的大小用角度表示。
10.优选地,包括步骤s1:利用探测器轨道数据和当前探测器姿态数据,实时计算星敏光轴矢量、器日矢量在探测器本体系的投影、目标天体矢量在探测器本体系的投影和目标天体张角;探测器本体系是指探测器在生产过程中定义的坐标系,将探测器的质心作为坐标原点,质心指向发动机方向定为
‑
x轴或
‑
z轴,质心指向帆板方向定为 y轴。
11.优选地,还包括步骤s2:通过星敏光轴矢量和器日矢量实时计算星敏光轴矢量与器日矢量夹角θ
st
‑
s
,通过星敏光轴矢量与探测器到目标天体矢量实时计算星敏光轴与探测器到目标天体矢量夹角θ
st
‑
m
。
12.优选地,还包括步骤s3:如果当前太阳进入了星敏传感器的太阳保护角范围内并且星敏传感器未受到目标天体遮挡,则继续使用当班星敏传感器;如果当前太阳未进入星敏传感器的太阳保护角范围内并且星敏传感器已经受到目标天体遮挡,则对当班星敏传感器进行切换,选择其它符合要求的星敏传感器引入控制闭环。
13.优选地,步骤s1中的星敏光轴矢量通过使用上一拍的探测器的惯性姿态c
bi
,计算星敏光轴在惯性系投影v
sti
;通过使用轨道计算探测器在日心惯性系下的位置,得到惯性系下的器日矢量v
ss
;根据时间计算目标天体位置,得到探测器到目标天体的单位矢量v
s
‑
m
;
14.上一拍的探测器的惯性姿态c
bi
是每隔固定时间进行计算的,即上一次计算的数值;惯性系表示3个坐标轴方向确定了,坐标原点可以任意定义;日心惯性系表示坐标原点在太阳中心的惯性系。
15.优选地,目标天体的张角θ
g
,计算方法为:
[0016][0017]
其中:r
m
为目标天体半径,d为探测器到天体中心距离。
[0018]
优选地,步骤s2中实时计算星敏光轴与器日矢量的夹角θ
st
‑
s
,计算公式为:
[0019]
θ
st
‑
s
=arc cos(v
sti
*v
ss
)
[0020]
其中,v
sti
指星敏光轴在惯性系投影,v
ss
指惯性系下的器日矢量。
[0021]
优选地,步骤s2中判断太阳是否进入了星敏传感器的太阳保护角范围内,用于识别星敏感器在轨工作环境,判断方法为:
[0022][0023]
其中,θ
p
为星敏保护角门限。
[0024]
优选地,通过实时计算星敏光轴与探测器到目标天体矢量的夹角θ
st
‑
m
,计算公式为
[0025]
θ
st
‑
m
=arc cos(v
sti
*v
s
‑
m
),
[0026]
其中,v
s
‑
m
探测器到目标天体的单位矢量,v
sti
指星敏光轴在惯性系投影;
[0027]
判断目标天体是否进入了星敏视场,用于识别星敏在轨工作环境,判断方法为:
[0028][0029]
其中,θ
v
为星敏成像视场。
[0030]
优选地,步骤s3根据步骤s2的判断结果,只有在太阳未进入星敏传感器的太阳保护角范围内,并且目标天体未进入星敏视场时,认为当前星敏数据有效,引入控制系统;否则切换星敏传感器,重复步骤s2,直至选出满足条件的星敏感器。
[0031]
与现有技术相比,本发明具有如下的有益效果:
[0032]
1、本发明利用探测器轨道和当前探测器姿态,实时计算各星敏受太阳照射、受目标天体遮挡情况,根据影响与否择优选择当班星敏,实现深空探测器姿控系统安全稳定的工作。
[0033]
2、本发明能够判断当前太阳是否进入了星敏的太阳保护角范围内,以及星敏未受目标天体遮挡。若不满足该条件,则对当班星敏进行切换,选择其他星敏数据引入控制闭环,否则继续将本台星敏数据引入控制系统。
附图说明
[0034]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0035]
图1为本发明中深空探测器星敏感器自主切换方法的步骤流程图。
具体实施方式
[0036]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0037]
如图1所示,本发明提供了一种深空探测器星敏感器自主切换方法,包括如下步骤:
[0038]
步骤s1:利用探测器轨道数据和当前探测器姿态数据,实时计算星敏光轴矢量、器日矢量在探测器本体系的投影、目标天体矢量在探测器本体系的投影和目标天体张角;探测器本体系是指探测器在生产过程中定义的坐标系,将探测器的质心作为坐标原点,质心
指向发动机方向定为
‑
x轴或
‑
z轴,质心指向帆板方向定为 y轴。
[0039]
步骤s1中的星敏光轴矢量通过使用上一拍的探测器的惯性姿态c
bi
,计算星敏光轴在惯性系投影v
sti
;通过使用轨道计算探测器在日心惯性系下的位置,得到惯性系下的器日矢量v
ss
;根据时间计算目标天体位置,得到探测器到目标天体的单位矢量v
s
‑
m
;其中,根据时间计算目标天体位置是根据世界天文联合会发布的行星轨道星历,可以根据时间计算天体位置。
[0040]
上一拍的探测器的惯性姿态c
bi
是每隔固定时间进行计算的,即上一次计算的数值;惯性系表示3个坐标轴方向确定了,坐标原点可以任意定义;日心惯性系表示坐标原点在太阳中心的惯性系。
[0041]
优选地,目标天体的张角θ
g
,计算方法为:
[0042][0043]
其中:r
m
为目标天体半径,d为探测器到天体中心距离。
[0044]
优选地,步骤s2中实时计算星敏光轴与器日矢量的夹角θ
st
‑
s
,计算公式为:
[0045]
θ
st
‑
s
=arc cos(v
sti
*v
ss
)
[0046]
其中,v
sti
指星敏光轴在惯性系投影,v
ss
指惯性系下的器日矢量。
[0047]
步骤s2:通过星敏光轴矢量和器日矢量实时计算星敏光轴矢量与器日矢量夹角θ
st
‑
s
,通过星敏光轴矢量与探测器到目标天体矢量实时计算星敏光轴与探测器到目标天体矢量夹角θ
st
‑
m
。
[0048]
步骤s2中判断太阳是否进入了星敏传感器的太阳保护角范围内,用于识别星敏感器在轨工作环境,判断方法为:
[0049][0050]
其中,θ
p
为星敏保护角门限。
[0051]
通过实时计算星敏光轴与探测器到目标天体矢量的夹角θ
st
‑
m
,计算公式为
[0052]
θ
st
‑
m
=arc cos(v
sti
*v
s
‑
m
),
[0053]
其中,v
s
‑
m
探测器到目标天体的单位矢量,v
sti
指星敏光轴在惯性系投影;
[0054]
判断目标天体是否进入了星敏视场,用于识别星敏在轨工作环境,判断方法为:
[0055][0056]
其中,θ
v
为星敏成像视场。
[0057]
步骤s3:如果当前太阳进入了星敏传感器的太阳保护角范围内并且星敏传感器未受到目标天体遮挡,则继续使用当班星敏传感器;如果当前太阳未进入星敏传感器的太阳保护角范围内并且星敏传感器已经受到目标天体遮挡,则对当班星敏传感器进行切换,选择其它符合要求的星敏传感器引入控制闭环。
[0058]
步骤s3根据步骤s2的判断结果,只有在太阳未进入星敏传感器的太阳保护角范围内,并且目标天体未进入星敏视场时,认为当前星敏数据有效,引入控制系统;否则切换星
敏传感器,重复步骤s2,直至选出满足条件的星敏感器。
[0059]
其中,星敏光轴矢量:星敏可以看做一台相机,即相机镜头指向的方向的量;
[0060]
器日矢量:深空探测器与太阳的连线,深空探测器指向太阳的方向的量;
[0061]
探测器到目标天体矢量:深空探测器到目标天体的连线,深空探测器指向目标天体的方向的量,例如目标天体是火星,该矢量即深空探测器到火星的连线;
[0062]
目标天体张角:站在深空探测器所在位置看目标天体,目标天体的大小,用角度表示,角度越大,表示看到的天体在人眼视场中所占的比例越大
[0063]
目标天体张角:站在深空探测器所在位置看目标天体,目标天体的大小用角度表示。
[0064]
本体系:每个卫星在生产过程中都会定义一个坐标系,通常将卫星质心作为坐标原点,质心指向发动机方向定为
‑
x轴或
‑
z轴,质心指向帆板方向定为 y轴,本体系即和卫星自身关联,描述卫星各部件在卫星上的位置、方向等信息。
[0065]
器日矢量在探测器本体系的投影:即该连线,在坐标系中进行描述,在坐标系3个轴上分别有多大。
[0066]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元。
[0067]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

