1.本发明属于物流技术领域,具体涉及一种基于蓝牙基站定位与调度的机器人物流搬运系统及方法。
背景技术:
2.随着工厂智能化、物流智能化的发展,越来越多的机器人及相关智能技术应用于物流机器人方面。实现工厂、仓库中货物的智能化、自动化搬运是大势所趋,也越来越受到更多人的关注。
3.目前,物流领域内智能化搬运系统中特定的机器人只能搬运特定尺寸范围内的货物,对于更大尺寸的货物,机器人之间不能合作搬运,从而导致现有的智能化搬运系统的适用范围较低。
4.因此,本技术提出一种基于蓝牙基站定位与调度的机器人物流搬运系统及方法,该系统能够根据待搬运货物的尺寸确定所需要的子机器人数量,并调动附近子机器人合作搬运,从而完成较大货物的搬运作业。
技术实现要素:
5.本发明的目的是为克服上述现有技术的不足,提供一种基于蓝牙基站定位与调度的机器人物流搬运系统及方法,可以调动附近多个子机器人合作搬运,从而完成较大货物的搬运作业。
6.为实现上述目的,本发明采用如下技术方案:一种基于蓝牙基站定位与调度的机器人物流搬运系统,所述搬运系统包括:位于货仓场地上的若干用来搬运待搬运货物的子机器人;若干用来配合定位子机器人的蓝牙基站;位于货仓场地四周用来定位待搬运货物的视觉定位系统;所述蓝牙基站呈网格分布且固定设于货仓场地上;云端服务器,所述子机器人与云端服务器进行通信连接,所述云端服务器控制子机器人的运动;所述蓝牙基站与云端服务器进行通信连接,所述云端服务器通过蓝牙基站对子机器人进行定位;所述视觉定位系统与云端服务器进行通信连接,所述云端服务器接收视觉定位系统测量的待搬运货物的位置信息。
7.进一步,所述子机器人上设置有mcu核心控制器、蓝牙子模块;所述子机器人的mcu核心控制器通过蓝牙子模块与蓝牙基站进行通信连接;所述子机器人通过mcu核心控制器与云端服务器进行通信连接。
8.进一步,所述子机器人包括机体,所述机体侧面上设置全向轮;所述机体的上部两侧分别设置有可调高度的刚性夹和可调高度的柔性夹;所述机体的上部设置支架,所述支架上设置三维扫描镜头;所述mcu核心控制器、蓝牙子模块设置在机体上;
所述三维扫描镜头与mcu核心控制器进行通信连接;所述mcu核心控制器控制全向轮的运动。
9.进一步,所述刚性夹下方的机体上以及柔性夹下方的机体上均设置测距模块。
10.进一步,所述蓝牙基站呈网格分布且固定设于货仓场地上。
11.一种基于蓝牙基站定位与调度的机器人物流搬运方法,采用如前所述的基于蓝牙基站定位与调度的机器人物流搬运系统,包括以下步骤:步骤1:视觉定位系统初步预判待搬运货物的位置,并将待搬运货物的位置数据传递给云端服务器;步骤2:云端服务器通过蓝牙基站三角定位各个子机器人的坐标,并在云端服务器内形成子机器人坐标库;步骤3:云端服务器根据视觉定位系统上传的待搬运获取的位置数据以及蓝牙基站上传的各个子机器人的坐标,确定离待搬运货物最近的子机器人;步骤4:云端服务器控制距离待搬运货物最近的第一个子机器人行至待搬运货物处;步骤5:行至待搬运货物处的第一个子机器人对待搬运货物进行三维扫描,并将扫描信息传递给云端服务器;云端服务器确定所需的子机器人数目n以及与各个所需子机器人对应的待搬运货物上的各个搬运点坐标,并将信息传递给云端服务器;步骤6:当待搬运货物处已有的子机器人数量小于所需的子机器人数目n时,云端服务器查询子机器人坐标库,从剩余的子机器人中选择最近的子机器人行至该待搬运货物处,并依次将待搬运货物上对应的搬运点坐标传递给行至待搬运货物处的子机器人;当待搬运货物处已有的子机器人数量等于所需的子机器人数目n时,进行步骤7:步骤7:位于待搬运货物处的所有子机器人根据所接收的搬运点坐标到达各自的搬运支撑点,调整搬运姿态,采用刚性夹或柔性夹进行搬运。
12.进一步,所述步骤2中云端服务器通过蓝牙基站三角定位各个子机器人坐标的方法为:运用三点定位原理,通过运用三个蓝牙基站解算每个蓝牙基站收发一个待定位子机器人的定位指令的时间,来计算每个蓝牙基站距离该子机器人的距离,然后计算子机器人的坐标。
13.进一步,所述步骤5中确定所需的子机器人数目n以及与各个所需子机器人对应的待搬运货物上的搬运点坐标的方法包括以下步骤:步骤51:行至待搬运货物处的第一个子机器人围绕待搬运货物环行一周进行三维扫描,将扫描出的待搬运货物的三维尺寸发送给云端服务器,云端服务器根据待搬运货物的三维尺寸确定所需要的搬运支撑点数量n;步骤52:行至待搬运货物处的第一个子机器人围绕待搬运货物环行一周进行三维扫描,使云端服务器明确待搬运货物的具体坐标(x,y);步骤53:第一个子机器再次围绕待搬运货物环形一周扫描,使云端服务器确定第一个搬运支撑点的相对坐标(dx1,dy1);步骤54:当已确定坐标的搬运支撑点数量小于所需要的搬运支撑点数量n时,第一个子机器人继续围绕待搬运货物环形一周扫描,确定各个搬运支撑点的相对坐标(dxi,dyi)(i=1,2,
…
,n);其中,(dxi,dyi)为第i个搬运支撑点基于待搬运货物具体坐标的相对
坐标;当已确定坐标的搬运支撑点数量等于所需要的搬运支撑点数量n时,进行步骤55:步骤55:云端服务器形成对应于待搬运货物的编码n(x,y)
‑
1(dx1,dy1)
‑
2(dx2,dy2)
‑…‑
i(dxi,dyi)
‑…‑ꢀ
n(dxn,dyn)。
14.进一步,所述步骤7中子机器人搬运的过程包括以下步骤:步骤71:子机器人根据所接收的搬运点坐标到达各自的搬运支撑点;步骤72:当待搬运货物的搬运支撑点需要采用柔性夹搬运时,云端服务器控制该搬运支撑点处子机器人的柔性夹对准该搬运支撑点;当待搬运货物的搬运支撑点不需要采用柔性夹搬运时,云端服务器控制该搬运支撑点处子机器人的刚性夹对准该搬运支撑点;步骤73:所有子机器人到位完毕后,云端服务器控制所有子机器人共同支撑起待搬运货物进行搬运作业。
15.本发明的有益效果是:(1)本发明通过蓝牙基站、视觉定位系统、云端服务器、子机器人的设置,能够实现对待搬货物的智能化搬运;同时根据待搬运货物的尺寸确定所需要的子机器人数量以及各个子机器人搬运支撑点的坐标,即对所需要的各个子机器人进行了合理分布,从而通过子机器人的合作能够完成较大货物的搬运作业,增加了适用范围;(2)本发明通过蓝牙传输的时间特性运用三点定位原理解析每个蓝牙基站距离子机器人的距离,从而实现子机器人坐标的确定;(3)本发明通过子机器人上的三维扫描镜头对待搬运货物进行扫描,将三维扫描技术应用于待搬运货物的测定,以此解算出所需子机器人的数量以及各个搬运支撑点的相对坐标,提高了搬运的稳定性与高效性及搬运的准确性;(4)本发明中子机器人具备位于两侧的柔性夹与刚性夹,在工作过程中可以根据需求切换,提高了物流系统的适用性。
附图说明
16.构成本技术的一部分的说明书附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。
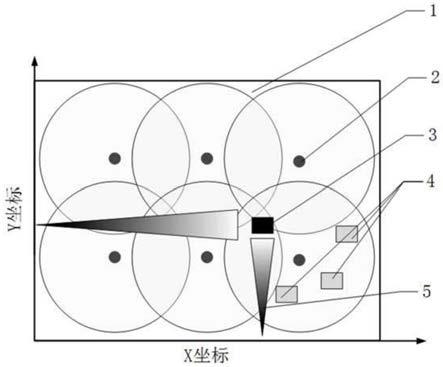
17.图1为本发明基于蓝牙基站定位与调度的机器人物流搬运系统的工作示意图;图2为本发明中子机器人的结构示意立体图;图3为本发明基于蓝牙基站定位与调度的机器人物流搬运系统中蓝牙基站三点定位子机器人坐标的示意图;图4为本发明基于蓝牙基站定位与调度的机器人物流搬运方法的搬运流程图;图5为本发明基于蓝牙基站定位与调度的机器人物流搬运方法中步骤5的流程图;图6为本发明基于蓝牙基站定位与调度的机器人物流搬运方法中步骤7的流程图;其中,1.货仓场地,2.蓝牙基站,3.待搬运货物;4.子机器人,41.三维扫描镜头,42.全向轮,43.机体,44.柔性夹,45.刚性夹,46.mcu核心控制器,47.蓝牙子模块,48.测距模块;
5
‑
视觉定位系统。
具体实施方式
18.应该指出,以下详细说明都是例示性的,旨在对本技术提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本技术所属技术领域的普通技术人员通常理解的相同含义。
19.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
20.本发明中,术语如“相连”、“连接”等应做广义理解,表示可以是固定连接,也可以是一体地连接或可拆卸连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的相关科研或技术人员,可以根据具体情况确定上述术语在本发明中的具体含义,不能理解为对本发明的限制。
21.下面结合附图和实施例对本发明进一步说明。
22.实施例1:如图1所示,本发明一实施方式一种基于蓝牙基站定位与调度的机器人物流搬运系统,包括:位于货仓场地1上的若干用来搬运待搬运货物3的子机器人4;若干用来配合定位子机器人4的蓝牙基站2;位于货仓场地1四周用来定位待搬运货物3的视觉定位系统5;以及云端服务器(未图示),所述子机器人4与云端服务器进行通信连接,所述云端服务器控制子机器人4的运动;所述蓝牙基站2与云端服务器进行通信连接,所述云端服务器通过蓝牙基站2对子机器人4进行定位;所述视觉定位系统5与云端服务器进行通信连接,所述云端服务器接收视觉定位系统5测量的待搬运货物3的位置信息。
23.其中,所述蓝牙基站2呈网格分布且固定设于货仓场地1上,以保证能够覆盖货仓场地1上的所有子机器人4以及所有待搬运货物3;所述子机器人4与蓝牙基站2进行通信连接,以实现对各个子机器人4位置的定位;具体地,子机器人4上设有蓝牙子模块47,通过广播模式向蓝牙基站2的蓝牙接收器发送信息,而蓝牙基站2通过计算信号往返时间确定子机器人4的位置信息,从而完成各个子机器人4位置的定位;而子机器人4位置的确定是通过三点定位法实现;蓝牙通讯方式可自主实现信号的来往,因此是非常便捷的实现两点间距离测量的方式;同时蓝牙通讯本身具有应答机制,点点距离的测量是基于这种应答机制的延迟时间计算出来,继而采用三点定位法能够实现位置坐标的定位。具体如何计算,将在后文详细描述。
24.优选的,所述子机器人4上还设置有mcu核心控制器46;所述子机器人4的mcu核心控制器46控制蓝牙子模块47与蓝牙基站2进行通信连接;所述子机器人4还通过mcu核心控制器46与云端服务器进行通信连接;具体地,所述mcu核心控制器46为单片机,该单片机内具有蓝牙模块,mcu核心控制器46控制内部的蓝
牙模块收发指令实现与云端服务器的通讯。
25.优选的,如图2所示,所述子机器人4还包括机体43,所述机体43侧面上设置全向轮42;所述机体43的上部两侧分别设置有可调高度的刚性夹45和可调高度的柔性夹44;所述机体43的上部设置支架,所述支架上设置三维扫描镜头41;所述mcu核心控制器46和蓝牙子模块47也设置在机体43上;所述三维扫描镜头41与所述mcu核心控制器46进行通信连接,所述mcu核心控制器46采集安置于机体43上方的三维扫描镜头41的数据,实现对待搬运货物3的具体观测,并将扫描到的信息上传至云端服务器;所述mcu核心控制器46控制全向轮42的运动,即云端服务器通过与mcu核心控制器46通信实现对子机器人4运动的控制;mcu核心控制器46接收云端服务器的信号之后完成运算并发放指令,将速度、方向信息传递给电机驱动器,再由电机驱动器驱动电机实现全向轮42的转动,从而实现运动。
26.优选的,所述刚性夹45下方的机体43上以及柔性夹44下方的机体43上均设置测距模块48,以实现刚性夹45、柔性夹44高度的控制;其中刚性夹45、柔性夹44通过安设于机体43内的电动推杆实现高度的调节,即测距模块48能够测量刚性夹45、柔性夹44的高度,从而控制相应的电动推杆动作使刚性夹45、柔性夹44到达需要的高度。
27.实施例2:如图4所示,本发明一实施方式一种基于蓝牙基站定位与调度的机器人物流搬运方法,利用实施例1中所述基于蓝牙基站定位与调度的机器人物流搬运系统,包括以下步骤:步骤1:视觉定位系统5初步预判待搬运货物3的位置,并将待搬运货物3的位置数据传递给云端服务器;具体地,可在云端服务器的显示器上形成待搬运货物3的分布图;步骤2:云端服务器通过蓝牙基站2三角定位各个子机器人4的坐标,并在云端服务器内形成子机器人4坐标库;具体地,可在云端服务器的显示器上形成子机器人4的分布图;具体地,如图3所示,步骤2中云端服务器通过蓝牙基站三角定位各个子机器人4坐标的方法为:运用三点定位原理,通过运用三个蓝牙基站2解算每个蓝牙基站2收发一个待定位子机器人的定位指令的时间,来计算每个蓝牙基站2距离该子机器人4的距离,然后计算子机器人的坐标并定义为(a0j
‑
xj
‑
yj)(j=1,2,
…
,n);其中n为子机器人的数量,a0j为第j个子机器人的编码,xj为第j个子机器人的横坐标,yj为第j个子机器人的纵坐标,以此记录每个子机器人的场地坐标。
28.其中子机器人4坐标的具体算法为:每个蓝牙基站2的位置是固定已知的,可以采用多个蓝牙基站2进行子机器人4的高精度坐标确定,本技术中采用距离相应子机器人4距离较近的三个蓝牙基站进行坐标确定,当误差大于阀值时,可更换蓝牙基站;三个蓝牙基站2分别向子机器人4通过蓝牙通讯方式发放距离测量指令,每个蓝牙基站2发放时开始计时t1,接收到子机器人4传回的信号时计时t2,时间差t2
‑
t1为信号往返的时间。
29.根据信号传递的速率v,则子机器人与该蓝牙基站之间的距离为
。
30.同样方法得到子机器人与另外两个蓝牙基站之间的距离。
31.更具体的,云端服务器是先获取了所有蓝牙基站2与所有子机器人4之间的距离,然后针对各子机器人4,按各蓝牙基站2与各子机器人4之间的距离进行排序,选择距离特定的子机器人4最近的三个蓝牙基站2用以对特定的子机器人4进行定位。
32.如图3所示,以蓝牙基站2为圆心、该蓝牙基站2与子机器人4之间的距离为半径画圆,画出的三个圆的交叉点就是子机器人4的位置。
33.步骤3:云端服务器根据视觉定位系统5上传的待搬运货物3的位置数据以及蓝牙基站2上传的各个子机器人4的坐标,确定离待搬运货物3最近的子机器人4;具体地,云端服务器通过计算各个子机器人4与待搬运货物3之间的距离,确定离待搬运货物3最近的子机器人;步骤4:云端服务器控制距离待搬运货物3最近的第一个子机器人4行至待搬运货物3处;步骤5:行至待搬运货物处3的第一个子机器人4对待搬运货物3进行三维扫描,以获取待搬运货物的尺寸、体积,并将扫描信息传递给云端服务器;云端服务器确定所需的子机器人数目n以及与各个所需子机器人对应的待搬运货物上的各个搬运点坐标;具体地,如图5所示,步骤5中确定所需的子机器人数目n以及与各个所需子机器人对应的待搬运货物上的搬运点坐标的方法包括以下步骤:步骤51:行至待搬运货物处3的第一个子机器人4围绕待搬运货物3环行一周进行三维扫描,将扫描出的待搬运货物3的三维尺寸发送给云端服务器,云端服务器根据待搬运货物3的三维尺寸确定所需要的搬运支撑点数量n,其中搬运支撑点数量就是所需的子机器人数量;云端服务器根据货物的体积以及物理性质确定货物总重量m,所需子机器人的数量n为m/m
×
e之后向上取整数来确定,其中m为子机器人可承载的重量,e为安全冗余系数,e的取值范围为1
‑
2。例如:当m=100kg,m=40kg,e=1.5时,m/m
×
e=3.75,3.75向上取整为4,则所需子机器人的数量n=4;搬运点位置确定,需要采用子机器人4的三维扫描镜头41配合云端服务器对货物的形状分类确定,首先对货物形状进行分类,例如三边形,四边形等;搬运点位置由货物的形状以及保证搬运点分布的均衡性进行确定。例如当货物为四边形货箱时,搬运点通常设置在四边底部或者四个顶点底部,当所需子机器人的数量n=4时,就可以将货物四边底部的中间位置作为四个搬运点,从而确定出各个搬运点的坐标。
34.步骤52:行至待搬运货物处3的第一个子机器人4围绕待搬运货物3环行一周进行三维扫描,使云端服务器明确待搬运货物3的具体坐标(x,y),通常将待搬运货物3的底部中心点坐标作为待搬运货物3的坐标;步骤53:第一个子机器人4再次围绕待搬运货物3环行一周扫描,使云端服务器确定第一个搬运支撑点的相对坐标(dx1,dy1);其中,(dx1,dy1)为第1个搬运支撑点基于待搬运货物3具体坐标的相对坐标;其中,最终搬运时,第一个子机器人4对应搬运第一个搬运支撑点;步骤54:当已确定坐标的搬运支撑点数量小于所需要的搬运支撑点数量n时,云端
服务器控制第一个子机器人4继续围绕待搬运货物环行一周扫描,确定各个搬运支撑点的相对坐标(dxi,dyi)(i=1,2,
…
,n);其中,(dxi,dyi)为第i个搬运支撑点基于待搬运货物3具体坐标的相对坐标;当已确定坐标的搬运支撑点数量等于所需要的搬运支撑点数量n时,进行步骤55:步骤55:云端服务器形成对应于待搬运货物的编码n(x,y)
‑
1(dx1,dy1)
‑
2(dx2,dy2)
‑…‑
i(dxi,dyi)
‑…‑ꢀ
n(dxn,dyn)。
35.步骤6:当待搬运货物处已有的子机器人数量小于所需的子机器人数目n时,云端服务器查询子机器人坐标库,从剩余的子机器人中选择最近的子机器人4行至该待搬运货物处,并依次将待搬运货物3上对应的搬运点坐标传递给行至待搬运货物3处的子机器人4,即将编码i(dxi,dyi)(i=1,2,
…
,n)传递给行至待搬运货物3处的子机器人3;当待搬运货物处已有的子机器人数量等于所需的子机器人数目n时,进行步骤7:步骤7:位于待搬运货物处3的所有子机器人4根据所接收的搬运点坐标到达各自的搬运支撑点,调整搬运姿态,采用刚性夹45或柔性夹44进行搬运。
36.具体地,如图6所示,步骤7中子机器人搬运的过程包括以下步骤:步骤71:子机器人4根据所接收的搬运点坐标到达各自的搬运支撑点;步骤72:当待搬运货物3的搬运支撑点需要采用柔性夹44搬运时,云端服务器控制该搬运支撑点处子机器人4的柔性夹44对准该搬运支撑点;具体地,可以使柔性夹44的顶部中心点或者顶部的某一特定点对准相应的搬运支撑点,具体如何对准,可以根据实际情况具体设定,以保证搬运的进行;当待搬运货物3的搬运支撑点不需要采用柔性夹44搬运时,云端服务器控制该搬运支撑点处子机器人4的刚性夹45对准该搬运支撑点;具体地,可以使刚性夹45的顶部中心点或者顶部的某一特定点对准相应的搬运支撑点,具体如何对准,可以根据实际情况具体设定,以保证搬运的进行;步骤73:所有子机器人4到位完毕后,云端服务器控制所有子机器人4共同支撑起待搬运货物3进行搬运作业。
37.本发明通过蓝牙基站、视觉定位系统、云端服务器、子机器人的设置,能够实现对待搬货物的智能化搬运;同时根据待搬运货物的尺寸确定所需要的子机器人数量以及各个子机器人搬运支撑点的坐标,即对所需要的各个子机器人进行了合理分布,从而通过子机器人的合作能够完成较大货物的搬运作业,增加了适用范围;本发明通过蓝牙传输的时间特性运用三点定位原理解析每个蓝牙基站距离子机器人的距离,从而实现子机器人坐标的确定;本发明通过子机器人上的三维扫描镜头对待搬运货物进行扫描,将三维扫描技术应用于待搬运货物的测定,以此解算出所需子机器人的数量以及各个搬运支撑点的相对坐标,提高了搬运的稳定性与高效性及搬运的准确性;本发明中子机器人具备位于两侧的柔性夹与刚性夹,在工作过程中可以根据需求切换,提高了物流系统的适用性。
38.上述虽然结合附图对本发明的具体实施方式进行了描述,但并非对本发明的限制,所属领域技术人员应该明白,在本发明的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本发明的保护范围以内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

