1.本发明属于机器人技术领域,具体涉及一种用于室内行走机器人有限路径定位装置及方法。
背景技术:
2.现有的室内机器人自主行走导航定位大多采用激光雷达slam方式或视觉vslam方式。激光雷达slam方式在复杂的动态环境下,地图信息丧失过大导致无法定位,因而无法定位和导航规划路径。视觉vslam方式受限于计算量过大、对环境图纹有依赖,因此机器人成本高、电能消耗大影响机器人续航能力;室内顶部部署二维码,作为视觉vslam方式之一,其运算量小也有些应用,但其实施的人工成本高且影响布署现场装饰美观,而二维码标签位置对布署现场也有一定要求,因此也限制了很多场所的应用。
技术实现要素:
3.针对上述问题,本发明提出一种用于室内行走机器人有限路径定位装置及方法,通过在机器人行走的路径上方天花板布设有多个红外光图案,机器人识别红外光图形,用以确认机器人所在的位置,实现室内行走机器人有限路径定位目的。
4.为了实现上述技术目的,达到上述技术效果,本发明通过以下技术方案实现:
5.第一方面,本发明提供了一种用于室内行走机器人有限路径定位装置,包括微处理器、红外摄像机和n个互不相同的红外光图形,n≥3;
6.所述红外摄像机与所述微处理器相连,用于测量红外光图形并发送至微处理器;
7.各红外光图形均布置在机器人行走路径上方,且各红外光图形之间的位置必须满足红外摄像机一次至少测量到k个红外光图形,k≥2;
8.所述微处理器内设有由n个互不相同的红外光图形组成的坐标系,并基于接收到的红外光图形数据计算出机器人的位置,完成定位。
9.可选地,所述机器人行走路径包括路径中心线,以及设于所述路径中心线两侧的边界线。
10.可选地,各红外光图形布置在机器人行走路径上方的室内天花板上。
11.可选地,所述用于室内行走机器人有限路径定位装置还包括里程计,所述里程计用于安装在机器人上,且与所述微处理器相连,二者配合实现机器人的区域定位。
12.可选地,所述基于接收到的红外光图形数据计算出机器人的位置,具体为:
13.当红外摄像机视窗中采集到红外光图形j
i
和红外光图形j
i 1
时,连续记录机器人行走过程中的多个与红外光图形j
i
对应的第一图形数据t
i,1
,t
i,2
,
…
t
i,m
和以及与红外光图形j
i 1
对应的第二图形数据t
i 1,1
,t
i 1,2
,
…
t
i 1,m
,计算出各图形数据t
i,1
,t
i,2
,
…
t
i,m
与图形数据t
i 1,1
,t
i 1,2
,
…
t
i 1,m
的最大间距,并筛选出对应的第一图形数据和第二图形数据;
14.基于筛选出的第一图形数据和第二图形数据,结合红外光图形组成的坐标系,计算出红外摄像机的位置和方向,即机器人的位置和方向。
15.可选地,定义第一图形数据图形中心位置在红外摄像机中可视框中的坐标是(x
i
,y
i
),第二图形数据图形中心位置在红外摄像机中可视框中的坐标是(x
i 1
,y
i 1
),则第一图形数据与第二图形数据之间的间距的计算公式为:
16.r=[(x
i
‑
x
i 1
)*(x
i
‑
x
i 1
) (y
i
‑
y
i 1
)*(y
i
‑
y
i 1
)]
1/2
。
[0017]
第二方面,本发明提供了一种用于室内行走机器人有限路径定位方法,包括:
[0018]
利用微处理器控制机器人在行走路径上行走;
[0019]
利用红外摄像机测量位于行走路径上方的红外光图形并发送至微处理器;各红外光图形均布置在机器人行走路径上方,且各红外光图形之间的位置必须满足红外摄像机一次至少测量到k个红外光图形,k≥2;
[0020]
微处理器基于其内设的由n个互不相同的红外光图形组成的坐标系,以及接收到的红外光图形数据,计算出机器人的位置,完成定位。
[0021]
可选地,所述机器人行走路径包括路径中心线,以及设于所述路径中心线两侧的边界线;所述用于室内行走机器人有限路径定位装置还包括里程计,所述里程计用于安装在机器人上,且与所述微处理器相连,二者配合实现机器人的区域定位。
[0022]
可选地,所述基于接收到的红外光图形数据计算出机器人的位置,具体为:
[0023]
当红外摄像机视窗中采集到红外光图形j
i
和红外光图形j
i 1
时,连续记录机器人行走过程中的多个与红外光图形j
i
对应的第一图形数据t
i,1
,t
i,2
,
…
t
i,m
和以及与红外光图形j
i 1
对应的第二图形数据t
i 1,1
,t
i 1,2
,
…
t
i 1,m
,计算出各图形数据t
i,1
,t
i,2
,
…
t
i,m
与图形数据t
i 1,1
,t
i 1,2
,
…
t
i 1,m
的最大间距,并筛选出对应的第一图形数据和第二图形数据;
[0024]
基于筛选出的第一图形数据和第二图形数据,结合红外光图形组成的坐标系,计算出红外摄像机的位置和方向,即机器人的位置和方向。
[0025]
可选地,定义第一图形数据图形中心位置在红外摄像机中可视框中的坐标是(x
i
,y
i
),第二图形数据图形中心位置在红外摄像机中可视框中的坐标是(x
i 1
,y
i 1
),则第一图形数据与第二图形数据之间的间距的计算公式为:
[0026]
r=[(x
i
‑
x
i 1
)*(x
i
‑
x
i 1
) (y
i
‑
y
i 1
)*(y
i
‑
y
i 1
)]
1/2
。
[0027]
与现有技术相比,本发明的有益效果:
[0028]
本发明提出一种用于室内行走机器人有限路径定位装置及方法,通过在机器人行走的路径上方天花板布设有多个红外光图案,机器人识别红外光图形,用以确认机器人所在的位置,实现室内行走机器人有限路径定位目的。
附图说明
[0029]
为了使本发明的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本发明作进一步详细的说明,其中:
[0030]
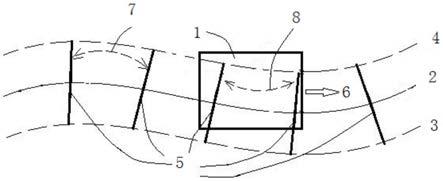
图1为本发明一种实施例的定位原理示意图;
[0031]
其中:
[0032]1‑
红外摄像机视窗,2
‑
路径中心线,3
‑
边界线,4
‑
边界线,5
‑
红外光图形,6
‑
机器人行走方向,7
‑
第一图形数据,8
‑
第二图形数据。
具体实施方式
[0033]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明的保护范围。
[0034]
下面结合附图对本发明的应用原理作详细的描述。
[0035]
实施例1
[0036]
本发明实施例中提供了一种用于室内行走机器人有限路径定位装置,如图1所示,包括微处理器(图中未示出)、红外摄像机和n个互不相同的红外光图形5,n≥3;
[0037]
所述红外摄像机与所述微处理器相连,用于测量红外光图形5并发送至微处理器,测量的数据包括图形特征值,因为任意图形的基本要素有形和色(光谱),形主要包含:线形(轮廓图、曲线图等)、面形块等;色包含:可见光谱,不可见光谱(传感器可感知);图像处理是针对线形、面形块、光谱等要素不同区分图像特征值的,本案采用“图形的特征值”是基于现有技术对图形较色谱处理易于实现;
[0038]
各红外光图形5均布置在机器人行走路径上方,且各红外光图形5之间的位置必须满足红外摄像机一次至少测量到k个红外光图形5,k≥2;所述机器人行走路径包括路径中心线2,以及设于所述路径中心线2两侧的边界线(3,4);在具体实施过程中,各红外光图形5布置在机器人行走路径上方的室内天花板上;
[0039]
所述微处理器内设有由n个互不相同的红外光图形5组成的坐标系,并基于接收到的红外光图形5数据计算出机器人的位置,完成定位。目前通常机器人导航定位需要通过固定物体做参照物,建全局地图,n个红外光图形5组成的坐标系是对应全局地图中的坐标点的,这样才能在局部环境变化,如有人和其它运动物遮挡固定物体参照物时,原建的全局地图不能定位,通过识别顶部红外光图形5,找到全局地图中的坐标点,达到定位目的。
[0040]
在本发明实施例的一种具体实施方式中,根据立体几何投影关系,当摄像机正对着某两个图形间距时,间距最大,这时测量的图形最接近实际尺寸,该点最接近垂直于地面,定位精度最高,为此,所述基于接收到的红外光图形5数据计算出机器人的位置,具体为:
[0041]
当红外摄像机视窗1中采集到红外光图形j
i
和红外光图形j
i 1
时,连续记录机器人行走过程中的多个与红外光图形j
i
对应的第一图形数据t
i,1
,t
i,2
,
…
t
i,m
和以及与红外光图形j
i 1
对应的第二图形数据t
i 1,1
,t
i 1,2
,
…
t
i 1,m
,计算出各图形数据t
i,1
,t
i,2
,
…
t
i,m
与图形数据t
i 1,1
,t
i 1,2
,
…
t
i 1,m
的最大间距,并筛选出对应的第一图形数据7和第二图形数据8;
[0042]
基于筛选出的第一图形数据7和第二图形数据8,结合红外光图形5组成的坐标系,计算出红外摄像机的位置和方向,即机器人的位置和机器人行走方向6。
[0043]
定义第一图形数据7图形中心位置在红外摄像机中可视框中的坐标是(x
i
,y
i
),第二图形数据8图形中心位置在红外摄像机中可视框中的坐标是(x
i 1
,y
i 1
),则第一图形数据7与第二图形数据8之间的间距的计算公式为:
[0044]
r=[(x
i
‑
x
i 1
)*(x
i
‑
x
i 1
) (y
i
‑
y
i 1
)*(y
i
‑
y
i 1
)]
1/2
。
[0045]
当测量到第一图形数据7与第二图形数据8之间的间距实际尺寸时,因j
i
和j
i 1
(全局地图中的坐标点)、(x
i
,y
i
)、(x
i 1
,y
i 1
)(摄像机中可视框中的坐标)是已知的,经几何坐标计算,即可得知在全局地图中的机器人实际坐标。
[0046]
在本发明实施例的一种具体实施方式中,所述用于室内行走机器人有限路径定位装置还包括里程计,所述里程计用于安装在机器人上,且与所述微处理器相连,二者配合实现机器人的区域定位。
[0047]
实施例2
[0048]
本发明实施例中提供了一种用于室内行走机器人有限路径定位方法,包括以下步骤:
[0049]
利用微处理器控制机器人在行走路径上行走;所述机器人行走路径包括路径中心线2,以及设于所述路径中心线2两侧的边界线(3,4);
[0050]
利用红外摄像机测量位于行走路径上方的红外光图形5并发送至微处理器;各红外光图形5均布置在机器人行走路径上方,且各红外光图形5之间的位置必须满足红外摄像机一次至少测量到k个红外光图形5,k≥2;在具体实施过程中,各红外光图形5布置在机器人行走路径上方的室内天花板上;测量的数据包括图形特征值,因为任意图形的基本要素有形和色(光谱),形主要包含:线形(轮廓图、曲线图等)、面形块等;色包含:可见光谱,不可见光谱(传感器可感知);图像处理是针对线形、面形块、光谱等要素不同区分图像特征值的,本案采用“图形的特征值”是基于现有技术对图形较色谱处理易于实现;
[0051]
微处理器基于其内设的由n个互不相同的红外光图形5组成的坐标系,以及接收到的红外光图形5数据,计算出机器人的位置,完成定位。
[0052]
在本发明实施例的一种具体实施方式中,根据立体几何投影关系,当摄像机正对着某两个图形间距时,间距最大,这时测量的图形最接近实际尺寸,该点最接近垂直于地面,定位精度最高,为此,所述基于接收到的红外光图形5数据计算出机器人的位置,具体为:
[0053]
当红外摄像机视窗1中采集到红外光图形j
i
和红外光图形j
i 1
时,连续记录机器人行走过程中的多个与红外光图形j
i
对应的第一图形数据t
i,1
,t
i,2
,
…
t
i,m
和以及与红外光图形j
i 1
对应的第二图形数据t
i 1,1
,t
i 1,2
,
…
t
i 1,m
,计算出各图形数据t
i,1
,t
i,2
,
…
t
i,m
与图形数据t
i 1,1
,t
i 1,2
,
…
t
i 1,m
的最大间距,并筛选出对应的第一图形数据7和第二图形数据8;
[0054]
基于筛选出的第一图形数据7和第二图形数据8,结合红外光图形5组成的坐标系,计算出红外摄像机的位置和方向,即机器人的位置和机器人行走方向6。
[0055]
定义第一图形数据7图形中心位置在红外摄像机中可视框中的坐标是(x
i
,y
i
),第二图形数据8图形中心位置在红外摄像机中可视框中的坐标是(x
i 1
,y
i 1
),则第一图形数据7与第二图形数据8之间的间距的计算公式为:
[0056]
r=[(x
i
‑
x
i 1
)*(x
i
‑
x
i 1
) (y
i
‑
y
i 1
)*(y
i
‑
y
i 1
)]
1/2
[0057]
当测量到第一图形数据7与第二图形数据8之间的间距实际尺寸时,因j
i
和j
i 1
(全局地图中的坐标点)、(x
i
,y
i
)、(x
i 1
,y
i 1
)(摄像机中可视框中的坐标)是已知的,经几何坐标计算,即可得知在全局地图中的机器人实际坐标。
[0058]
在本发明实施例的一种具体实施方式中,所述用于室内行走机器人有限路径定位装置还包括里程计,所述里程计用于安装在机器人上,且与所述微处理器相连,二者配合实现机器人的区域定位。
[0059]
本发明实施例中的定位方法可以基于实施例1中的定位装置来实现。
[0060]
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术
人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

