一种基于siemens控制模块的控制系统
技术领域
1.本发明涉及伺服控制系统技术领域,具体为一种基于siemens控制模块的控制系统。
背景技术:
2.伺服组件指:由伺服电动机、机械减速或耦合机构、伺服控制器、传感器等组成的一体化伺服机构,例如:光驱主轴驱动模块、机器人的关节、汽车电动助力机构等等。
3.柔性库加工简称fms,是一组数控机床和其他自动化的工艺设备,由计算机信息控制系统和物料自动储运系统有机结合的整体,柔性制造系统由加工、物流、信息流三个子系统组成,
4.belong柔性库是专为汽车子总成生产而设计的工艺解决方案,柔性库允许垂直,存放工具,从而缩减储存区的占用空间,工装夹具在滑车和存储装置之间转移,滑车可以相,同方式自由接收另一工装夹具,一个水平滑车用于水平工装夹具更换,一个升降滑车用于垂直工装夹具更换,双层柔性库可满足四种车型,还可加至三层以容纳六种车型,柔性库可用作独立工作单元,接收零件并传送到车间物流部;也可与其他单元组合形成生产线,柔性库有多种尺寸可供选择,部件包括存储框架、垂直升降装置(驱动装置和升降杆梁)以及相应尺寸的工装夹具。
5.目前在使用的基于siemens控制模块的控制系统,存在以下问题,故障复位,急停等容易产生失效功,在关机重启后零点会丢失,位置信息在修改程序,或初始化时会丢失。
技术实现要素:
6.本发明提供的发明目的在于提供一种基于siemens控制模块的控制系统,解决上述背景技术中的问题。
7.为实现以上目的,本发明通过以下技术方案予以实现:一种基于siemens控制模块的控制系统,包括:
8.控制模块,可编程逻辑控制器,它采用一类可编程的存储器,用于其内部存储程序,执行逻辑运算、顺序控制、定时、计数与算术操作等面向用户的指令,并通过数字或模拟式输入/输出控制各种类型的机械或生产过程;
9.处理模块,中央处理器,是电子计算机的主要设备之一,电脑中的核心配件,其功能主要是解释计算机指令以及处理计算机软件中的数据,电脑中所有操作都由处理模块负责读取指令,对指令译码并执行指令的核心部件;
10.hmi交互模块,hmi交互模块为人机界面,人机界面是系统和用户之间进行交互和信息交换的媒介,它实现信息的内部形式与人类可以接受形式之间的转换,凡参与人机信息交流的领域都存在着人机界面;
11.s120伺服模块,闭环伺服系统是一种自动控制系统,其中包括功率放大和反馈,使输出变量的值相应输入变量的值,由伺服电动机、比较线路、伺服放大线路、速度检测器和
安装在工作台上的位置检测器组成,这种系统对工作台实际位移量进行自动检测并与指令值进行比较,用差值进行控制;
12.电源,用于供电处理;
13.驱动轴,用于准确的电机驱动;
14.所述控制模块的输出端与处理模块的输入端双向信号连接,所述控制模块的输出端与两个s120伺服模块的输入端信号连接。
15.进一步的,其中一个所述s120伺服模块的输出端依次与三个驱动轴信号连接。
16.进一步的,剩余一个所述s120伺服模块的输出端与电源的输入端电性连接。
17.进一步的,所述电源的输出端依次与四个驱动轴信号连接。
18.进一步的,所述hmi交互模块的输出端与处理模块的输入端双向信号连接。
19.进一步的,所述处理模块1516 3pn/dp通过pn/pn couple与控制模块进行信号交互。
20.进一步的,所述hmi交互模块通过pn
‑
box与控制模块进行通讯。
21.进一步的,所述控制模块数据交互,使用传输区进行交互信号。
22.进一步的,所述控制模块1采用profinet及profisafe网络通信。
23.进一步的,所述控制模块1作为系统控制与控制模块用pn/pn进行通信。
24.本发明提供了一种基于siemens控制模块的控制系统。具备以下有益效果:
25.采用siemens控制模块,处理模块2型号为1516
‑
3pn/dp,作为系统控制,控制模块1用pn/pn进行通信,整体采用profinet及profisafe网络通信,伺服系统采用s120系列,能实现插补及同步运动功能,采用ktp900移动面板进行点位示教,程序监控,故障复位,急停等功能,伺服电机编码器采用绝对值型,在关机重启后零点不会丢失,位置信息在修改程序,或初始化时不会丢失,整体设计进线功率不大于55kw,380v50hz电源,外围设备气路控制采用阀岛控制,设备状态检测现场(ip67等级)模块。
附图说明
26.图1为本发明一种基于siemens控制模块的控制系统的总系统图;
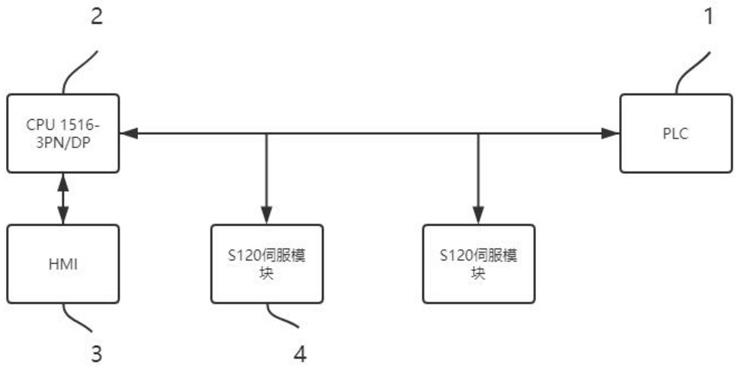
27.图2为本发明一种基于siemens控制模块的控制系统网络拓扑图的示意图;
28.图3为本发明一种基于siemens控制模块的控制系统s120伺服模块的示意图。
29.图中:1、控制模块;2、处理模块;3、hmi交互模块;4、s120伺服模块;401、电源;402、驱动轴。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
31.所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
32.下面结合附图与实施例对本发明作进一步说明:
33.请参阅图1
‑
3,本发明提供一种技术方案:一种基于siemens控制模块的控制系统,
包括:
34.控制模块1,可编程逻辑控制器,它采用一类可编程的存储器,用于其内部存储程序,执行逻辑运算、顺序控制、定时、计数与算术操作等面向用户的指令,并通过数字或模拟式输入/输出控制各种类型的机械或生产过程;
35.处理模块2,中央处理器,是电子计算机的主要设备之一,电脑中的核心配件,其功能主要是解释计算机指令以及处理计算机软件中的数据,电脑中所有操作都由处理模块负责读取指令,对指令译码并执行指令的核心部件;
36.hmi交互模块3,hmi交互模块为人机界面,人机界面是系统和用户之间进行交互和信息交换的媒介,它实现信息的内部形式与人类可以接受形式之间的转换,凡参与人机信息交流的领域都存在着人机界面;
37.s120伺服模块4,闭环伺服系统是一种自动控制系统,其中包括功率放大和反馈,使输出变量的值相应输入变量的值,由伺服电动机、比较线路、伺服放大线路、速度检测器和安装在工作台上的位置检测器组成,这种系统对工作台实际位移量进行自动检测并与指令值进行比较,用差值进行控制;
38.电源401,用于供电处理;
39.驱动轴402,用于准确的电机驱动;
40.控制模块1的输出端与处理模块21的输入端双向信号连接,控制模块1的输出端与两个s120伺服模块4的输入端信号连接,采用siemens控制模块,处理模块2型号为1516
‑
3pn/dp,作为系统控制,控制模块1用pn/pn进行通信,整体采用profinet及profisafe网络通信,伺服系统采用s120系列,能实现插补及同步运动功能,采用ktp900移动面板进行点位示教,程序监控,故障复位,急停等功能,伺服电机编码器采用绝对值型,在关机重启后零点不会丢失,位置信息在修改程序,或初始化时不会丢失,整体设计进线功率不大于55kw,380v50hz电源,外围设备气路控制采用阀岛控制,设备状态检测现场(ip67等级)模块。
41.具体的,其中一个s120伺服模块4的输出端依次与三个驱动轴402信号连接。
42.具体的,剩余一个s120伺服模块4的输出端与电源401的输入端电性连接。
43.具体的,电源401的输出端依次与四个驱动轴402信号连接。
44.具体的,hmi交互模块3的输出端与处理模块21的输入端双向信号连接。
45.具体的,处理模块1516 3pn/dp21通过pn/pn couple与控制模块1进行信号交互。
46.具体的,hmi交互模块3通过pn
‑
box与控制模块1进行通讯。
47.具体的,控制模块1数据交互,使用传输区进行交互信号。
48.具体的,控制模块1采用profinet及profisafe网络通信。
49.具体的,控制模块1作为系统控制与控制模块1用pn/pn进行通信。
50.使用时,采用siemens控制模块,处理模块2型号为1516
‑
3pn/dp,作为系统控制,控制模块1用pn/pn进行通信,整体采用profinet及profisafe网络通信,伺服系统采用s120系列,能实现插补及同步运动功能,采用ktp900移动面板进行点位示教,程序监控,故障复位,急停等功能,伺服电机编码器采用绝对值型,在关机重启后零点不会丢失,位置信息在修改程序,或初始化时不会丢失,整体设计进线功率不大于55kw,380v50hz电源,外围设备气路控制采用阀岛控制,设备状态检测现场(ip67等级)模块。
51.以上的仅是本发明的优选实施方式,应当指出,对于本领域的普通技术人员来说,
在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

