1.本发明涉及一种通用型轮速模拟器及方法,具体来说是一种运用于需要轮速场合的装置及方法,完善了汽车测试台架轮速信号生成的方法。
背景技术:
2.在研发测试和下线检测过程中,经常需要模拟实车轮速信号,并将其输入给abs(antilock brake system)、esp(electronic stability program)等制动系统中,用以检测制动系统的性能。但是在研发测试时,经常采用机械式轮速传感器,以手动转动的方式提供轮速信号。该方式轮速不可控,而且也不能很好的模拟实车轮速曲线。台架上经常用v
‑
f转换模块再配合电压
‑
电流转换模块实现轮速信号的模拟。但是该方式需要进行两次转换,可能在转换过程中由于信号传递时间的问题,使得转换后的轮速信号出现滞后或者不一致的情况出现。本发明输出的轮速信号就是从实车上采集来的,也没有很多转换环节,直接从某一频率的电压方波信号,转换为同频率的电流方波信号。故此本发明可以很好的解决实际中遇到的问题。
技术实现要素:
3.为了解决背景技术中存在的问题,本发明的目的是提出一种通用型轮速模拟器及方法,提供更加方便使用的测试工具、减少信号转换的环节、提供更接近实车轮速的轮速曲线。
4.本发明所采用的技术方案是:
5.一、一种通用型轮速模拟器及方法:
6.包括输入接口、运算单元、信号转换电路及轮速接口;输入接口和运算单元的输入端连接,运算单元的输出端经信号转换电路和轮速接口连接,轮速接口连接到ecu的轮速输入接口;
7.该模块代替了原车车轮固定支架上的轮速传感器,不再接回到车轮固定支架上的轮速传感器,而是接到ecu的轮速输入接口,ecu指的是abs、esc(esp)等需要轮速的控制单元。
8.所述输入接口,接收轮速输入信息并发送提供到运算单元;
9.所述运算单元,接收来自输入接口的轮速输入信息而产生模拟轮速控制脉冲信号,然后将模拟轮速控制脉冲信号发送到信号转换电路;
10.所述信号转换电路,接收来自运算单元的模拟轮速控制脉冲信号进而输出对应类型的轮速信号,并发送到轮速接口;
11.所述轮速接口,接收来自信号转换电路的轮速信号进而向需要轮速的设备输出轮速信号。
12.还包括显示模块,运算单元连接显示模块,显示模块显示轮速模拟器当前工作状态信息。
13.还包括电源模块,所述电源模块分别与存储装置、运算单元、显示模块和信号转换电路电性相连。
14.所述输入接口包括三个部分,包括来自存储装置、按键输入和轮速报文。
15.所述的信号转换电路包括两种类型,分为信号转换电路1型和信号转换电路2型;所述的轮速接口包括两种类型,分为轮速接口信号1型和轮速接口信号2型;信号转换电路1型、信号转换电路2型均与运算单元电性相连,所述轮速接口信号1型与信号转换电路1型电性相连,所述轮速接口信号2型与信号转换电路2型电性相连;
16.信号转换电路1型将模拟轮速控制脉冲信号转换输出为与主动式轮速传感器相同的7
‑
14ma的方波电流信号,轮速接口信号1型为主动式轮速传感器类型的霍尔式轮速信号接口,接收方波电流信号进而输出霍尔式轮速信号;
17.信号转换电路2型将模拟轮速控制脉冲信号转换输出为对应频率的正弦波电压信号,轮速接口信号2型为被动式轮速信号接口即磁电式轮速信号接口,接收方波电压信号进而输出磁电式轮速信号。
18.所述的信号转换电路1型输出的7
‑
14ma的方波电流信号是浮空的,即不必参考轮速模拟器的电源电压、地或者以地为参考的任何信号源。
19.二、轮速运算单元的处理方法,方法主要有以下几个步骤:
20.1)根据输入的每个车轮的轮速输入信息,输入到运算单元得到控制信号的频率;
21.所述1)中,通过车轮周长c除以实车车轮齿圈的齿数量,得到两个齿间对应的车轮长度s;根据两个齿间对应的车轮长度s结合输入的轮速输入信息v,得车轮经过两个齿的时间为t=s/v,再根据时间t获得控制信号的频率为f=1/t。
22.2)轮速变化时,根据轮速进行积分运算,得出行驶距离;
23.3)再将行驶距离实时与实车的车轮齿圈对应的轮胎长度比较,获得改变控制信号电平的时间点,在该时间点设定控制信号的频率,进行控制信号的电平转换;
24.轮速不是一成不变的,也不是可以随意改变的。
25.运算单元周期性从轮速输入接口获取当前输入的轮速输入信息,即设定的目标轮速v,意味着此时经过步骤1),计算出控制信号的频率,但是此时不一定能立刻改变控制信号的频率;因为实际车辆的轮速改变必定经过两个齿,才计算得出;为了和实际情况保持一致,在传感器到达下一个齿时做改变;速度对时间的积分即为长度,当长度等于s的时刻可重新设定控制信号的频率;因此,在可重新设定控制信号频率的时刻前(包含该时刻),如果从轮速输入接口获取的轮速即目标轮速发生了改变,则进行控制信号频率的更新。
26.4)根据控制信号的频率生成控制信号,发送施加到信号转换电路,实现由轮速控制信号向模拟轮速信号的转换。
27.本发明将采集到的轮速信号通过can、k
‑
line、lin等总线或者存储设备配合按键、触控屏等选择轮速曲线并将其传输给mcu,mcu得到各个轮速,再经过运算输出给信号转换电路,通过轮速接口传递给abs(antilock brake system)、esp(electronic stability program)等ecu,ecu根据模拟轮速,实现相应的功能。从而实现本发明作为研发测试、下线检测、台架程序验证的轮速输入的目的。
28.本发明的有益效果是:
29.1、轮速信息均为实车采集,可最大程度还原实车轮速信号,对研发、测试及程序验
证等工作有极大的帮助;
30.2、利用从实车采集来的各种路况(高附、低附、对开等)下的轮速信息,经过转换即可提供给ecu进行仿真测试,可缩短开发周期并节约大量人力物力的消耗;
31.3、可模拟多种轮速传感器,可模拟主动式的非智能霍尔型轮速传感器、主动式的智能型霍尔轮速传感器、被动式的磁电型轮速传感器,通用性强;
32.4、技术上转换电路1型(51)输出的7
‑
14ma的方波电流信号是浮空的,即不必参考轮速模拟器的电源电压、地或者以地为参考的任何信号源,因此可适用于在电源端进行轮速采样的轮速解析芯片中,同样适用于在接地端进行轮速采样的轮速解析芯片中。
33.5、技术上为7
‑
14
‑
28ma的主动式智能型霍尔传感器的轮速模拟器的实现打下了基础。
附图说明
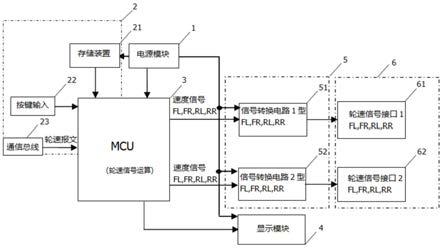
34.图1是本发明的整体架构示意图。
具体实施方式
35.下面结合附图1进一步描述本发明的具体实施方式:
36.如图1所示,模拟器包括输入接口2、运算单元3、信号转换电路5及轮速接口6;输入接口2和运算单元3的输入端连接,运算单元3的输出端经信号转换电路5和轮速接口6连接,轮速接口6连接到四个车轮。
37.输入接口2,接收轮速输入信息并发送提供到运算单元3;
38.运算单元3,接收来自输入接口2的轮速输入信息而产生模拟轮速控制脉冲信号,然后将模拟轮速控制脉冲信号发送到信号转换电路5;
39.运算单元3通过读取存储装置或者总线通讯的方式为模拟器提供预先采集到的实际工况下的轮速信息。
40.信号转换电路5,接收来自运算单元3的模拟轮速控制脉冲信号进而输出对应类型的轮速信号,并发送到轮速接口6;
41.轮速接口6,接收来自信号转换电路5的轮速信号进而向需要轮速的设备输出轮速信号。例如汽车的ecu,再由ecu实现制动功能。
42.还包括显示模块4,运算单元3连接显示模块4,显示模块4接收运算单元3发送过来的数据进而显示轮速模拟器当前工作状态信息。
43.显示模块4显示待选轮速曲线信息,显示当前轮速条目输出进度,显示当前轮速等信息。
44.还包括电源模块1,电源模块1用于为系统中的用电器件供电,电源模块1分别与存储装置21、运算单元3、显示模块4和信号转换电路5电性相连。
45.输入接口2包括三个部分,包括来自存储装置21、按键输入22和轮速报文23,存储装置21是指来自插入sd卡、u盘等存储器后所传输过来的轮速输入信息,按键输入22是指来自人工通过按键输入后所传输过来的轮速输入信息,轮速报文23是指来自车辆通信所传输过来的轮速输入信息。
46.信号转换电路5包括两种类型,分为信号转换电路1型51和信号转换电路2型52;轮
速接口6包括两种类型,分为轮速接口信号1型61和轮速接口信号2型62;信号转换电路1型51、信号转换电路2型52均与运算单元3电性相连,轮速接口信号1型61与信号转换电路1型51电性相连,轮速接口信号2型62与信号转换电路2型52电性相连;
47.信号转换电路1型51将模拟轮速控制脉冲信号转换输出为与主动式轮速传感器相同的7
‑
14ma的方波电流信号,轮速接口信号1型61为代替主动式霍尔型轮速传感器的接口,接收方波电流信号进而输出与霍尔型轮速传感器相同的轮速信号;
48.信号转换电路2型52将模拟轮速控制脉冲信号转换输出为对应频率的正弦波电压信号,轮速接口信号2型62为磁电式轮速信号接口,接收方波电压信号进而输出与磁电型轮速传感器相同的轮速信号。
49.这两种信号转换电路分别作用,提高了该系统的通用性;轮速接口6用于向需要轮速的设备提供轮速信号接口,这些设备通常指的是abs(antilock brake system)、esp(electronic stability program)等。
50.本发明中,提供输入的轮速信息来源于实车数据;车辆匹配人员通过can、k、lin等总线采集到实车运行过程中轮速、刹车等信号,并将其存储到存储装置中;通过存取设备配合按键选择需要输出的轮速数据或总线通讯方式输入到轮速模拟器,通过不同类型的信号转换电路5和轮速接口6处理实现了适用于多种类型的轮速传感器。
51.信号转换电路1型51输出的7
‑
14ma的方波电流信号是浮空的,适用于在电源端采样的电路中,同样适用于在接地端采样的电路中。
52.信号转换电路1型通过两个7ma恒流源电路叠加,并且控制其中一路通断实现7
‑
14ma电流信号转换。
53.本发明能实现高度还原实车信号,方法主要有以下两个步骤:
54.1)根据输入的每个车轮的轮速输入信息,输入到运算单元3得到控制信号的频率;
55.具体通过车轮周长c除以实车车轮齿圈的齿数量,得到两个齿间对应的车轮长度s;根据两个齿间对应的车轮长度s结合输入的轮速输入信息v,得车轮经过两个齿的时间为t=s/v,再根据时间t获得控制信号的频率为f=1/t。
56.2)轮速变化时,根据轮速进行积分运算,得出行驶距离;
57.3)再将行驶距离实时与实车的车轮齿圈对应的轮胎长度比较,获得改变控制信号电平的时间点,在该时间点设定控制信号的频率,进行控制信号的电平转换;
58.轮速不是一成不变的,也不是可以随意改变的。
59.运算单元3周期性从轮速输入接口获取当前输入的轮速输入信息,即设定的目标轮速v,意味着此时经过步骤1),计算出控制信号的频率,但是此时不一定能立刻改变控制信号的频率;因为实际车辆的轮速改变必定经过两个齿,才计算得出;为了和实际情况保持一致,在传感器到达下一个齿时做改变;速度对时间的积分即为长度,当长度等于s的时刻可重新设定控制信号的频率;因此,在可重新设定控制信号频率的时刻前(包含该时刻),如果从轮速输入接口获取的轮速即目标轮速发生了改变,则进行控制信号频率的更新。
60.4)根据控制信号的频率生成控制信号,发送施加到信号转换电路,实现由轮速控制信号向模拟轮速信号的转换。
61.具体实施中,mcu通过解析出can等通信总线或者存储设备提供的轮速信息,然后需要向信号转换电路提供控制信号。
62.由此,本发明这样能实现通用性轮速模拟,能通过报文复现轮速,高度还原实车信号。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

