1.本发明公开了一种双拓扑耦合谐振子牵制同步控制器优化算法,确保搜索出的稀疏牵制控制器实现双拓扑耦合的谐振子系统状态同步,从而提升牵制控制效能,并提高稀疏牵制同步控制器的搜索速度,属于复杂网络优化控制领域。
背景技术:
2.复杂网络无处不在,生态系统、神经科学、疾病传播、社会网络等诸多领域都可以用复杂网络系统建模来进行分析。复杂网络的同步是其中的一个基本问题,广泛应用于无人机协同、混沌加密、卫星编队等方面。复杂网络的同步行为往往需要靠牵制控制来实现,因此,需要研究牵制同步控制器的优化选取,对尽可能少的节点施加牵制控制以节约控制能量。近年来,大量传感器和控制节点选择方法在复杂网络可控性和可观性中进行了广泛研究。这些方法为我们提供了一些牵制控制节点优选问题的解决方案。此外,(y.
‑
y.liu,j.
‑
j.slotine,and a.
‑
l.barab
á
si,“controllability of complex networks,”nature,vol.473,no.7346,pp.167
–
173,2011.)、(t.h.summers,f.l.cortesi,and j.lygeros,“on submodularity and controllability in complex dynamical networks,”ieee control netw.syst.,vol.3,no.1,pp.91
–
101,mar.2016.)提出了通过优化基于格莱姆的可控性(可观测性)度量来优化选择线性网络的控制(传感器)节点的方法。上述方法都是针对线性复杂网络进行研究。
3.非线性复杂网络的研究更为复杂。文献(a.haber,f.molnar,and a.e.motter,“state observation and sensor selection for nonlinear networks,”ieee control netw.syst.,vol.5,no.2,pp.694
–
708,jun.2018.)研究了非线性网络的传感器选择和状态估计问题。尽管控制和估计问题是对偶的,但文献(a.haber,f.molnar,and a.e.motter,“state observation and sensor selection for nonlinear networks,”ieee control netw.syst.,vol.5,no.2,pp.694
–
708,jun.2018.)中提出的方法对于控制节点选择的推广并不简单。文献(j.qi,k.sun,and w.kang,“optimal pmu placement for power system dynamic state estimation by using empirical observability gramian,”ieee trans.power syst.,vol.30,no.4,pp.2041
–
2054,jul.2015.)提出的基于经验的格莱姆方法也可用于控制节点选择。然而,这些方法的局限性在于,即使对于小型网络,经验可控性的计算也是难以实施的。近年来,线性系统的控制节点选择算法已在文献(s.a.nugroho,a.f.taha,n.gatsis,t.h.summers,and r.krishnan“algorithms for joint sensor and control nodes selection in dynamic networks,”automatica,vol.106,pp.124
–
133,aug.2019)、(a.f.taha,n.gatsis,t.summers,and s.a.nugroho,“time
‑
varying sensor and actuator selection for uncertain cyber
‑
physical systems,”ieee control netw.syst.,vol.6,no.2,pp.750
–
762,jun.2019.)、(c.
‑
y.chang,s.mart
í
nez,and j.cort
é
s,“co
‑
optimization of control and actuator selection for cyber
‑
physical systems,”ifac papersonline,vol.51,no.23,pp.118
–
123,2018)中提出。对于非线性系
统,文献(s.a.nugroho and a.f.taha,“sensor placement strategies for some classes of nonlinear dynamic systems via lyapunov theory,”in proc.ieee 58th conf.decis.control(cdc),nice,france,2019,pp.4551
–
4556.)提出了一种非线性系统传感器选择和观测器设计的新方法,但如何将该方法应用于存在多个拓扑耦合的复杂网络系统牵制控制节点选择仍有待研究。
技术实现要素:
4.本发明所要解决的技术问题是针对上述现有技术存在的不足,而提供一种双拓扑耦合谐振子牵制同步控制器优化算法,从而提高算法的寻优速度,实现系统同步并节约控制资源,快速搜索牵制节点数量尽可能小的节点组合。
5.为解决上述技术问题,本发明采用的技术方案是:一种双拓扑耦合谐振子牵制同步控制器优化算法,具体包括以下步骤:
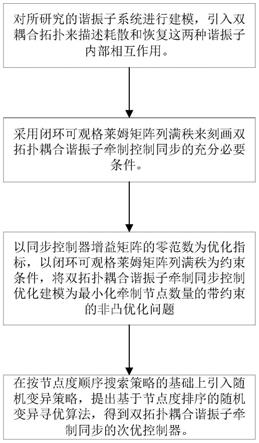
6.步骤1.对所研究的谐振子系统进行建模,引入双耦合拓扑来描述耗散和恢复这两种谐振子内部相互作用;
7.步骤2.采用闭环可观格莱姆矩阵列满秩来刻画双拓扑耦合谐振子牵制控制同步的充分必要条件;
8.步骤3.以同步控制器增益矩阵的零范数为优化指标,以闭环可观格莱姆矩阵列满秩为约束条件,将双拓扑耦合谐振子牵制同步控制优化建模为最小化牵制节点数量的带约束的非凸优化问题;
9.步骤4.在按节点度顺序搜索策略的基础上引入随机变异策略,提出基于节点度排序的随机变异寻优算法,得到双拓扑耦合谐振子牵制同步的次优控制器。
10.进一步地,对步骤1中所研究的谐振子系统进行建模,引入双耦合拓扑来描述耗散和恢复这两种谐振子内部相互作用,具体为:
11.步骤101.对于由n个相互作用的振子组成的耦合网络,第i个振子的动力学描述为:
[0012][0013]
其中,i=1,
…
,n;x
i
是第i个振荡器的状态,是x
i
的一阶导数,是x
i
的二阶导数,m和k是振荡器固有增益矩阵;d
ij
是第i个和第j个振荡器之间耗散耦合增益矩阵,r
ij
是第i个和第j个振荡器之间恢复耦合增益矩阵。
[0014]
在步骤1基础上,引入牵制控制,构建闭环可观格莱姆矩阵来刻画双拓扑耦合谐振子牵制控制同步的充分必要条件,步骤2具体为:
[0015]
步骤201.定义z
i
=m
1/2
x
i
作为内部状态,z
i
的动力学由下式给出:
[0016][0017]
其中,
[0018]
步骤202.对中的节点施加牵制控制,而其他n
‑
p个节点未受控制,n个相互作用振荡器的动态由下式描述:
[0019][0020][0021]
其中,u
i
为线性牵制控制器
[0022][0023]
式中,b
i
≥0和c
i
≥0是半正定增益矩阵;s是孤立振子,s动态满足:
[0024][0025]
线性牵制控制器使得n个相互作用的振荡器实现渐近同步,有:lim
t
→
∞
||x
i
(t)
‑
s(t)||=0;
[0026]
步骤203.定义3.定义的动力学由下式描述:
[0027][0028]
令为同步误差,则有:
[0029][0030]
其中,为半正定矩阵,当时,令则有:
[0031][0032]
其中,以及l
d
和l
r
为图的拉普拉斯矩阵,表示如下:
[0033][0034]
牵制控制同步实现当且仅当渐近收敛,当且仅当可观,也即:
[0035][0036]
步骤3以同步控制器增益矩阵的零范数为优化指标,建立最小化牵制节点数量的带约束非凸优化问题,具体为:
[0037]
步骤301.考虑在上述可观性约束成立的条件下,获得尽可能稀疏的增益矩阵b和c,也即
[0038][0039][0040]
步骤4提出基于节点度排序的随机变异寻优算法,得到双拓扑耦合谐振子牵制同步的次优控制器,具体为:
[0041]
步骤401.分别对拉普拉斯矩阵l
d
和l
r
对角块非零项的数量进行统计并排序,获得其前v位对应的指标集合l
d
和l
r
,并初始化搜寻指标k=k0;
[0042]
步骤402.设置指标i=0;
[0043]
步骤403.设置计数指标m=0;
[0044]
步骤404.分别从l
d
与l
r
中随机选取i与k
‑
i个元素作为矩阵非零对角元的位置指标,进而随机生成非零的增益矩阵和并记m=m 1;
[0045]
步骤405.判断是否满足约束条件;若满足,则输出矩阵b,c,结束步骤;否则进入步骤406;
[0046]
步骤406.检验m是否大于设定的步数m;若是,则进入步骤407;否则返回步骤404;
[0047]
步骤407.检验指标i是否大于搜索指标k;若是,则令k=k 1,并返回步骤402;否则令i=i 1,并返回步骤403。
[0048]
与现有技术相比,本发明的优点包括:通过建立带约束的非凸优化问题,确保寻求的牵制控制器可以实现双拓扑耦合谐振子的牵制控制同步;引入节点度排序,提高了算法的搜索速度;在节点度顺序搜索策略的基础上引入随机变异策略,提升了牵制控制器寻优效果。
附图说明
[0049]
图1是本发明的步骤示意图;
[0050]
图2是本发明的具体流程示意图;
[0051]
图3是本发明实施例所提供牵制控制器下双拓扑耦合谐振子牵制同步状态示意图。
具体实施方式
[0052]
本发明提供了一种双拓扑耦合谐振子牵制同步控制器优化算法,其具体步骤如图1所示。
[0053]
实施例1
[0054]
一种双拓扑耦合谐振子牵制同步控制器优化算法,包括如下步骤:
[0055]
步骤1.对所研究的谐振子系统进行建模,引入双耦合拓扑来描述耗散和恢复这两种谐振子内部相互作用;
[0056]
本发明实施例中,该步骤具体为:
[0057]
步骤101.考虑由n=25个相互作用的振子组成的耦合网络,第i个振子的动力学描述为:
[0058][0059]
其中是第i个振荡器的状态,和为振荡器固有增益矩阵。益矩阵。表示第i个和与第j个振荡器之间耗散耦合增益矩阵,对于其余的i,j有表示i和j之间没有耗散耦合。类似地,第i和j个振荡器之间恢复耦合增益矩阵为荡器之间恢复耦合增益矩阵为,对于其余的i,j有:表示i和j之间没有恢复耦合。且假定耦合拓扑中不存在自环,即
[0060]
步骤2.采用闭环可观格莱姆矩阵列满秩来刻画双拓扑耦合谐振子牵制控制同步的充分必要条件;
[0061]
本发明实施例中,该步骤具体为:
[0062]
步骤201.定义z
i
=m
1/2
x
i
作为内部状态,z
i
的动力学由下式给出
[0063][0064]
其中,由于m,k是正定矩阵,d
ij
,r
ij
是半正定矩阵,因此是正定的,是半正定的。
[0065]
步骤202.考虑中的节点施加牵制控制,而其他n
‑
p个节点未受控制。
此时n个相互作用振荡器的动态由下式描述:
[0066][0067][0068]
其中
[0069][0070]
为线性牵制控制器,b
i
≥0和c
i
≥0是半正定增益矩阵。s(t)是孤立振子,其动态满足:
[0071][0072]
牵制控制同步要求设计适当的控制器,使得n个相互作用的振荡器实现渐近同步,即对i=1,
…
,n有:lim
t
→
∞
||x
i
(t)
‑
s(t)||=0。
[0073]
步骤203.定义步骤203.定义的动力学由下式描述:
[0074][0075]
令为同步误差,则有:
[0076][0077]
其中为半正定矩阵,当时,令我们有:
[0078][0079]
其中以及拉普拉斯矩阵l
d
和l
r
依照如下的具体形式设定:
[0080][0081]
牵制控制同步实现当且仅当渐近收敛,当且仅当可观,也即:
[0082][0083]
步骤3.以同步控制器增益矩阵的零范数为优化指标,建立最小化牵制节点数量的带约束非凸优化问题;
[0084]
本发明实施例中,该步骤具体为:
[0085]
步骤301.考虑在上述可观性约束成立的条件下,获得尽可能稀疏的增益矩阵b,c。即寻找满足可行性条件的非零增益矩阵尽可能少,也即
[0086][0087][0088]
步骤4.提出基于节点度排序的随机变异寻优算法,得到双拓扑耦合谐振子牵制同步的次优控制器;
[0089]
本发明实施例中,该步骤具体为:
[0090]
步骤401.分别对拉普拉斯矩阵l
d
和l
r
对角块非零项的数量进行统计并排序,获得其前v位对应的指标集合l
d
和l
r
。并初始化搜寻指标k=k0=2。
[0091]
步骤402.设置指标i=0。
[0092]
步骤403.设置计数指标m=0。
[0093]
步骤404.分别从l
d
与l
r
中随机选取i与k
‑
i个元素作为矩阵非零对角元的位置指标,进而随机生成非零的增益矩阵和并记m=m 1。
[0094]
步骤405.判断是否满足约束条件。若满足,则输出矩阵b,c,结束步骤;否则进入步骤406。
[0095]
步骤406.检验m是否大于设定的步数m=1000。若是,则进入步骤407;否则返回步骤404;
[0096]
步骤407.检验指标i是否大于搜索指标k。若是,则令k=k 1,并返回步骤402;否则令i=i 1,并返回步骤403。
[0097]
图2为本发明所提供算法生成的牵制控制器b,c下的谐振子状态轨迹。可以看出,本发明所提出的牵制控制寻优算法求出的控制器能够实现双拓扑耦合谐振子牵制控制同步。
[0098]
表1给出了采用不同的优化算法所得到的结果。结果表明本发明所提出的算法相比遍历算法所消耗的时间要小的多,相比于最小度选取算法优化效果有着明显的提升。
[0099]
表1
[0100][0101]
需要说明的是,在附图或说明书正文中,未绘示或描述的实现方式,均为所属技术领域中普通技术人员所知的形式,并未进行详细说明。此外,上述对各元件和方法的定义并不仅限于实施例中提到的各种具体结构、形状或方式,本领域普通技术人员可对其进行简单地更改或替换。
[0102]
以上仅是本发明的具体实施例,应当指出,以上实施例对本发明不构成限定,相关工作人员在不偏离本发明技术思想的范围内,所进行的多样变化和修改,均落在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

