1.本发明涉及整车nvh技术领域,尤其是涉及一种考虑双层隔振的电动汽车起步工况分析方法。
背景技术:
2.随着汽车技术发展,大众对汽车舒适性需求也逐渐提高。电动汽车由于其电机结构及工作特点,在运行时能提供稳定的转速及扭矩,但在汽车启动的时候,电机扭矩从零迅速上升到工作扭矩,瞬时的扭矩变化给电驱动总成带来了瞬态冲击,而电驱动总成悬置系统,尤其是双层隔振系统能改善整车振动特性,因此,研究考虑双层隔振的电动汽车起步工况建模及分析方法具有重要意义。
3.传统的电驱动总成系统,在对电机激励进行分析时,将电机输出扭矩视为一阶跃信号,虽然能在一定程度上满足建模要求,但无法很好地反应电机实际输出扭矩。由于电机结构特点及工作时电磁力的干扰,电机实际输出扭矩往往是带有扭矩波动,此外,在电机激励建模中,采用前馈反馈控制算法可以更好地将电机扭矩波动控制在允许范围内,改善整车舒适性。
4.在电动汽车起步工况的分析过程中,对整车的建模尤为重要。目前,对于整车动力学地建模研究中,往往考虑单层悬置隔振结构,其在传统内燃机汽车隔振效果良好,但由于电动汽车电机激励为高频激励,传统的单层隔振系统已无法满足其整车隔振需求,而考虑副车架及衬套的双层隔振系统能较好地提高整车高频隔振性能。通过对激励源及传递路径入手,分别采用激励源控制方法以及传递路径结构优化,使得电动汽车在起步工况下的振动特性进一步得到改善。
技术实现要素:
5.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种考虑双层隔振的电动汽车起步工况分析方法。
6.本发明的目的可以通过以下技术方案来实现:一种考虑双层隔振的电动汽车起步工况分析方法,包括以下步骤:
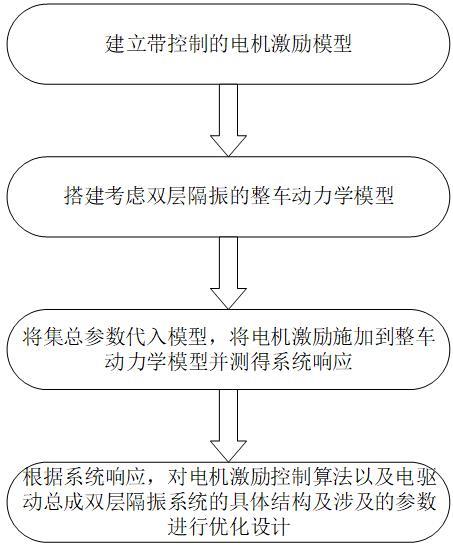
7.步骤1:建立带控制的电机激励模型;
8.步骤2:搭建考虑双层隔振的整车动力学模型;
9.步骤3:将集总参数代入模型,将电机激励施加到整车动力学模型并测得系统响应;
10.步骤4:根据系统响应,对电机激励控制算法以及电驱动总成双层隔振系统的具体结构及涉及的参数进行优化设计。
11.进一步地,步骤1中带控制的电机激励模型,用于表达电驱动总成激励特性,所述带控制的电机激励模型f
m
包括6个集总参数:电机x方向电磁力、电机y方向电磁力、电机z方向电磁力、电机绕x方向电磁转矩、电机绕y方向电磁转矩、电机绕z方向电磁转矩,其描述公
式为:
12.f
m
=(f
x
,f
y
,f
z
,m
x
,m
y
,m
z
)
t
13.式中,f
m
表示电机激励向量,f
x
为电机x方向电磁力、f
y
为电机y方向电磁力、f
z
为电机z方向电磁力、m
x
为电机绕x方向电磁转矩、m
y
为电机绕y方向电磁转矩、m
z
为电机绕z方向电磁转矩。
14.进一步地,步骤2中的搭建考虑双层隔振的整车动力学模型,用于表达电动汽车整车振动特性,建立的考虑双层隔振的整车动力学模型中包括系统位移、系统动能、系统势能及系统耗散能。系统位移q的描述公式包括12个集总参数:动力总成x方向位移、动力总成y方向位移、动力总成z方向位移、动力总成绕x轴角位移、动力总成绕y轴角位移、动力总成绕z轴角位移、副车架x方向位移、副车架y方向位移、副车架z方向位移、副车架绕x轴角位移、副车架绕y轴角位移、副车架绕z轴角位移,其描述公式为:
[0015][0016]
q
p
=(x
p
,y
p
,z
p
,θ
xp
,θ
yp
,θ
zp
)
t
[0017]
q
s
=(x
s
,y
s
,z
s
,θ
xs
,θ
ys
,θ
zs
)
t
[0018]
式中,q为系统位移矩阵,q
p
为动力总成系统位移矩阵,q
s
为副车架系统位移矩阵,x
p
为动力总成x方向位移、y
p
为动力总成y方向位移、z
p
为动力总成z方向位移、θ
xp
为动力总成绕x轴角位移、θ
yp
为动力总成绕y轴角位移、θ
zp
为动力总成绕z轴角位移、x
s
为副车架x方向位移、y
s
为副车架y方向位移、z
s
为副车架z方向位移、θ
xs
为副车架绕x轴角位移、θ
ys
为副车架绕y轴角位移、θ
zs
为副车架绕z轴角位移。
[0019]
进一步地,步骤2中的考虑双层隔振的整车动力学模型,用于表达电动汽车整车振动特性,模型中系统动能的描述公式包括26个集总参数,包括系统速度12个集总参数以及系统质量14个集总参数,其描述公式为:
[0020][0021][0022][0023]
式中,e
t
为系统动能,m为系统质量矩阵,m
p
为动力总成质量矩阵,m
s
为副车架质量
矩阵,为系统速度矩阵,为动力总成速度矩阵,为副车架速度矩阵,速度矩阵可由位移矩阵求导得到。m
p
表示动力总成质量、i
xx
表示动力总成绕x轴惯量、i
yy
表示动力总成绕y轴惯量、i
zz
表示动力总成绕z轴惯量、i
xy
表示动力总成绕xy轴惯性积、i
yz
表示动力总成绕yz轴惯性积、i
xz
表示动力总成绕xz轴惯性积、m
s
表示副车架质量、j
xx
表示副车架绕x轴惯量、j
yy
表示副车架绕y轴惯量、j
zz
表示副车架绕z轴惯量、j
xy
表示副车架绕xy轴惯性积、j
yz
表示副车架绕yz轴惯性积、j
xz
表示副车架绕xz轴惯性积。
[0024]
进一步地,所述考虑双层隔振的整车动力学模型,用于表达电动汽车整车振动特性,模型中系统势能e
v
的描述公式包括两部分能量:悬置势能以及衬套势能,描述公式为:
[0025][0026][0027][0028]
k=k1' k2'
[0029]
式中,e
v
表示系统势能,q为系统位移矩阵,k表示系统刚度矩阵,k
′1表示悬置系统刚度矩阵、k'2表示衬套系统刚度矩阵、b
i
表示从输入到悬置转移矩阵、t
i
表示悬置方向转移矩阵、k
im
表示悬置复刚度或静态矩阵、d
j
表示从输入到衬套转移矩阵、r
j
表示衬套方向转移矩阵、k
jc
表示衬套线性刚度矩阵。
[0030]
进一步地,考虑双层隔振的整车动力学模型,用于表达电动汽车整车振动特性,模型中系统耗散能e
d
的描述公式包括两部分能量:悬置耗散能以及衬套耗散能,描述公式为:
[0031][0032][0033][0034]
c=c1' c2'
[0035]
式中,e
d
表示系统耗散能,为系统速度矩阵,c表示系统阻尼矩阵,c1'表示悬置系统阻尼矩阵、c2'表示衬套系统阻尼矩阵、b
i
表示从输入到悬置转移矩阵、t
i
表示悬置方向转移矩阵、c
im
表示悬置阻尼矩阵、d
j
表示从输入到衬套转移矩阵、r
j
表示衬套方向转移矩阵、c
jc
表示衬套阻尼矩阵。
[0036]
与现有技术相比,本发明具有以下优点:
[0037]
(1)本发明在电机激励源建模时考虑了电机实际输出扭矩波动,在整车动力学模型的搭建过程中充分考虑了副车架位移及衬套的弹性位移,使得模型更为精确。
[0038]
(2)本发明分别从激励源以及传递路径入手,分别对电机激励进行控制,并对双层悬置隔振系统结构及涉及参数进行优化,使得电动汽车在起步工况下振动特性得到更好地改善。
附图说明
[0039]
图1为本发明一种考虑双层隔振的电动汽车起步工况分析方法的流程图;
[0040]
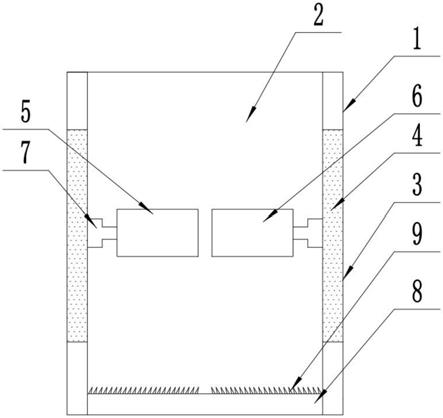
图2为本发明中电机激励模型示意图;
[0041]
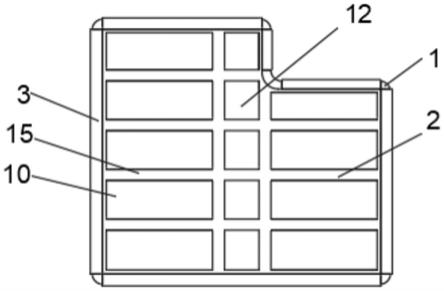
图3为本发明中考虑双层隔振的整车动力学模型示意图;
[0042]
图4为本发明中电动汽车起步工况下动力总成位移响应曲线;
[0043]
图5为本发明中电动汽车起步工况下动力总成加速度响应曲线。
具体实施方式
[0044]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
[0045]
实施例:如图1所示,一种考虑双层隔振的电动汽车起步工况分析方法,包括以下步骤:
[0046]
步骤1:建立带控制的电机激励模型;
[0047]
步骤2:搭建考虑双层隔振的整车动力学模型;
[0048]
步骤3:将集总参数代入模型,将电机激励施加到整车动力学模型并测得系统响应;
[0049]
步骤4:根据系统响应,对电机激励控制算法以及电驱动总成双层隔振系统的具体结构及涉及的参数进行优化设计。
[0050]
带控制的电机激励模型如图2所示,包括电机模型以及前馈反馈控制模型。带控制的电机激励模型f
m
包括6个集总参数:电机x方向电磁力、电机y方向电磁力、电机z方向电磁力、电机绕x方向电磁转矩、电机绕y方向电磁转矩、电机绕z方向电磁转矩,描述公式为:
[0051]
f
m
=(f
x
,f
y
,f
z
,m
x
,m
y
,m
z
)
t
[0052]
式中,f
m
表示电机激励向量,f
x
为电机x方向电磁力、f
y
为电机y方向电磁力、f
z
为电机z方向电磁力、m
x
为电机绕x方向电磁转矩、m
y
为电机绕y方向电磁转矩、m
z
为电机绕z方向电磁转矩。
[0053]
考虑双层隔振的整车动力学模型如图3所示,包括12个自由度:动力总成x方向位移、动力总成y方向位移、动力总成z方向位移、动力总成绕x轴角位移、动力总成绕y轴角位移、动力总成绕z轴角位移、副车架x方向位移、副车架y方向位移、副车架z方向位移、副车架绕x轴角位移、副车架绕y轴角位移、副车架绕z轴角位移,其描述公式为:
[0054][0055]
q
p
=(x
p
,y
p
,z
p
,θ
xp
,θ
yp
,θ
zp
)
t
[0056]
q
s
=(x
s
,y
s
,z
s
,θ
xs
,θ
ys
,θ
zs
)
t
[0057]
式中,q为系统位移矩阵,q
p
为动力总成系统位移矩阵,q
s
为副车架系统位移矩阵,x
p
为动力总成x方向位移、y
p
为动力总成y方向位移、z
p
为动力总成z方向位移、θ
xp
为动力总成绕x轴角位移、θ
yp
为动力总成绕y轴角位移、θ
zp
为动力总成绕z轴角位移、x
s
为副车架x方向位移、y
s
为副车架y方向位移、z
s
为副车架z方向位移、θ
xs
为副车架绕x轴角位移、θ
ys
为副车架绕y轴角位移、θ
zs
为副车架绕z轴角位移。
[0058]
系统质量矩阵可由系统动能e
t
表达式得到,模型中系统动能描述公式为:
[0059][0060][0061][0062]
式中,e
t
为系统动能,m为系统质量矩阵,m
p
为动力总成质量矩阵,m
s
为副车架质量矩阵,为系统速度矩阵,为动力总成速度矩阵,为副车架速度矩阵,速度矩阵可由位移矩阵求导得到。m
p
表示动力总成质量、i
xx
表示动力总成绕x轴惯量、i
yy
表示动力总成绕y轴惯量、i
zz
表示动力总成绕z轴惯量、i
xy
表示动力总成绕xy轴惯性积、i
yz
表示动力总成绕yz轴惯性积、i
xz
表示动力总成绕xz轴惯性积、m
s
表示副车架质量、j
xx
表示副车架绕x轴惯量、j
yy
表示副车架绕y轴惯量、j
zz
表示副车架绕z轴惯量、j
xy
表示副车架绕xy轴惯性积、j
yz
表示副车架绕yz轴惯性积、j
xz
表示副车架绕xz轴惯性积。
[0063]
系统刚度矩阵可通过计算系统势能e
v
得到,系统势能描述公式为:
[0064][0065][0066][0067]
k=k1' k2'
[0068]
式中,e
v
表示系统势能,q为系统位移矩阵,k表示系统刚度矩阵,k
′1表示悬置系统刚度矩阵、k'2表示衬套系统刚度矩阵、b
i
表示从输入到悬置转移矩阵、t
i
表示悬置方向转移矩阵、k
im
表示悬置复刚度或静态矩阵、d
j
表示从输入到衬套转移矩阵、r
j
表示衬套方向转移矩阵、k
jc
表示衬套线性刚度矩阵。
[0069]
系统阻尼矩阵体现在系统耗散能e
d
表达式中,系统耗散能描述公式为:
[0070]
[0071][0072][0073]
c=c1' c2'
[0074]
式中,e
d
表示系统耗散能,为系统速度矩阵,c表示系统阻尼矩阵,c1'表示悬置系统阻尼矩阵、c2'表示衬套系统阻尼矩阵、b
i
表示从输入到悬置转移矩阵、t
i
表示悬置方向转移矩阵、c
im
表示悬置阻尼矩阵、d
j
表示从输入到衬套转移矩阵、r
j
表示衬套方向转移矩阵、c
jc
表示衬套阻尼矩阵。
[0075]
将参数代入考虑双层隔振的整车动力学模型,求解得到的电驱动总成位移、加速度曲线如图4、图5所示。
[0076]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。