一种基于uwb的智能跟随搬运机器人
技术领域
1.本实用新型涉及智能搬运机器人技术领域,具体涉及一种基于uwb的智能跟随搬运机器人,该机器人可实现自主越障或自主避障。
背景技术:
2.市场上跟随搬运机器人在较为平坦的地面环境中应用较为广泛,实际生活中人们往往需要在不同场地(草地、沙地、台阶、楼梯、门厅)搬运各种各样的货物,且存在不能越障困难等问题,同时,新冠疫情物资搬运、多场景(超市、商场、机场、博物馆、高尔夫球场、战场环境)下货物搬运、特殊人群(老人、残疾人、孕妇、孩子等)搬运物品较为困难等情况。
技术实现要素:
3.本实用新型提供一种基于uwb的智能跟随搬运机器人,解决现有技术中搬运机器人无法适应复杂的工作环境的问题。
4.为实现上述目的,本实用新型提出的技术方案是:
5.一种基于uwb的智能跟随搬运机器人,包括移动机器人和移动标签,移动机器人和移动标签之间通过uwb模块通信;所述移动机器人包括机架、机架上端设置托物盘、机架上设置stm32主控芯片、lcd显示屏、uwb模块、超声波模块、电源模块、两组行进驱动机构和一组摆臂驱动机构;stm32主控芯片分别与 lcd显示屏、uwb模块、超声波模块、两组行进驱动机构和一组摆臂驱动机构连接,电源模块连接上述模块为它们供电;所述uwb模块包括三个uwb定位基站,三个uwb定位基站在机架上呈等边三角型安放;所述超声波模块包括多组超声波传感器,它们分别设置在机架的上下层,在机架的上层前部中央设置一个超声波传感器,在机架的下层前部中央、前部左侧和前部右侧各设置一个超声波传感器;所述移动标签包括stm32微控制器、与stm32微控制器连接的锂电池、 uwb定位标签和数码开关。
6.进一步的,所述两组驱动机构包括直流减速电机和电机驱动器;所述摆臂驱动机构包括摆臂电机和电机驱动器。
7.进一步的,所述超声波模块选用hc
‑
sr04。
8.进一步的,所述电机驱动器选用l298n电机驱动模块。
9.进一步的,所述lcd显示屏选用lcd12864。
10.进一步的,所述stm32主控芯片还连接有陀螺仪模块。
11.与现有技术相比,本实用新型的有益效果如下:
12.1.本实用新型可更精准地跟随,实时精准的定位:本实用新型采用的是uwb 技术来进行定位跟随,uwb技术与传统的短距离无线通讯相比,可以提供更快、更远的传输速率,而且uwb定位技术定位精度为厘米级,误差范围在10cm之内。这也就意味着机器人因为跟随精度低从而丢失跟随目标这种情况发生的可能性大大降低。
13.2.本实用新型可实现越障、避障跟随:可以通过超声波来对跟随路径上存在的障碍物做出判断,来让机器人避开障碍,同时该产品设计了自主越障功能,履带式的机械结构
与摆臂设计结合可实现越障,意味着即使在复杂的环境,也可以快速避开或者跨越障碍紧跟目标。
14.3.本实用新型可实现更稳定地搬运:相比于传统的搬运机器人,本产品采用悬挂式底盘设计,可保证跟随搬运机器人平稳翻越障碍物或经过复杂环境时的物品安全。
15.4.本实用新型更加小巧、质轻、无害:本产品使用木制和铝合金材料,重量仅5kg左右,且移动目标携带的定位标签对人体无害。
附图说明
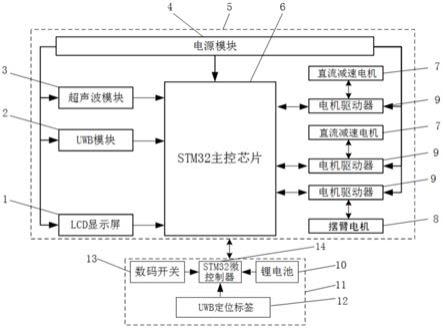
16.图1为本实用新型的整体结构示意框图;
17.图2为本实用新型的工作过程流程图;
18.图3为本实用新型的工作示意图。
19.图中,1
‑
lcd显示屏,2
‑
uwb模块,3
‑
超声波模块,4
‑
电源模块,5
‑
移动机器人,6
‑
stm32主控芯片,7
‑
直流减速电机,8
‑
摆臂电机,9
‑
电机驱动器, 10
‑
锂电池,11
‑
移动标签,12
‑
uwb定位标签,13
‑
数码开关,14
‑
stm32微控制器。
具体实施方式
20.为了使本实用新型的目的、技术方案和优点更加清楚,下面将结合实施例对本实用新型作进一步地详细描述,显然,所描述的实施例仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
21.本实用新型重点实现三部分功能:第一是自主越障,本产品采用两组直流减速电机7,一组摆臂电机8,在机架的上下分层布置多组超声波传感器,摆臂驱动机构和多组超声波传感器配合构成障碍感知机制,即反应式行为的摆臂运动控制体系结构。第二是自主跟随,本实用新型采用三组uwb定位基站结合uwb 定位标签定位跟随方式,通过设定移动标签11与移动及器人5的距离,移动目标物携带的移动标签11时,移动及器人5可完成自主跟随,并实时与目标物保持设定的距离。第三是手自一体的控制模式,由于在复杂环境时,本实用新型的越障能力比较差,这时工作人员可转至手动操控模式,手动模式本设计使用的是nec编码方式的遥控器,红外接收选择hs0038红外遥控器接收头,远程控制智能跟随搬运机器人,增加移动及器人5的越障跟随能力。
22.参见图1,本实用新型基于uwb的智能跟随搬运机器人,包括移动机器人5 和移动标签11,移动机器人5和移动标签11之间通过uwb模块2通信;移动机器人5包括机架和设置在机架上的stm32主控芯片6、lcd显示屏1、uwb模块2、超声波模块3、电源模块4、两组行进驱动机构和一组摆臂驱动机构,行进驱动机构为机器人履带式的运动结构提供行进的动力,摆臂驱动机构提供摆臂避障抬升的动力;stm32主控芯片6分别与lcd显示屏1、uwb模块2、超声波模块3、两组行进驱动机构和一组摆臂驱动机构连接,电源模块4连接上述模块为它们供电;uwb模块2包括三个uwb定位基站,三个uwb定位基站在机架上呈等边三角型安放,uwb定位基站采用dwm1000芯片,并通过spi与stm32主控芯片6连接,uwb定位技术定位精度为厘米级,误差范围在10cm之内。这也就意味着机器人因为跟随精度低从而丢失跟随目标这种情况发生的可能性大大降低;超声波模块3包括多组超声波传感器,它们分别设置在机架的
上下层,在机架的上层前部中央设置一个超声波传感器,选用hc
‑
sr04,用于感知上层前方障碍物,在机架的下层前部中央、前部左侧和前部右侧各设置一个超声波传感器,用于感知下层障碍物,超声波传感器通过io与stm32主控芯片6连接;所述移动标签11包括stm32微控制器14、与stm32微控制器14连接的锂电池10、uwb定位标签12和数码开关13。
23.两组驱动机构包括直流减速电机7和电机驱动器9;摆臂驱动机构包括摆臂电机8和电机驱动器9;电机驱动器9选用l298n电机驱动模块,移动机器人5 通过l298n电机驱动模块驱动左右直流减速电机7和摆臂电机8,控制小车的运动与摆臂。直流减速电机7驱动履带式的运动结构与摆臂结合可以实现越障,意味着即使在复杂的环境,也可以快速避开或者跨越障碍紧跟目标。
24.stm32主控芯片6采用stm32f103zet6控制版,控制整个移动机器人;stm32 微控制器14采用stm32f103c8t6控制板,操控移动标签11。
25.stm32主控芯片6还连接有陀螺仪模块,采用六轴传感器(mpu6050)检测移动机器人5上端平台的水平角度,使搬运机器人载物自适应平衡。
26.参见图2和图3,本实用新型的障碍感知和摆臂行为机制如下:
27.可以定义机器人爬楼梯的过程中摆臂两种行为为:
①
摆臂放平至0
°
位置。
②
摆臂升起至45
°
位置。
28.为确定移动机器人摆臂模块当前时刻应执行何种行为,可以通过以下两个参数进行判断:规定下层超声波传感器在正前方向测量到的距离为a[i
n
],规定上层超声波传感器在正前方向测量到的距离为a[j
n
],经实验分析移动机器人前方 15cm越障最易,上下台阶相差20cm越障最优。
[0029]
步骤s1,下层超声波传感器工作,当a[i
n
]≤15cm,则检测到前方是否有障碍物,当步骤s1检测到障碍物时,转至步骤s2,对比上下层超声波传感器检测障碍物距离差;当步骤s1检测到无障碍物时,转至s4,则检测到前方无障碍物,摆臂放平至0
°
。
[0030]
步骤s2,上层超声波传感器工作,当20cm≤|a[i
n
]
‑
a[j
n
]|,则感知到前方有台阶、楼梯等障碍物,且可越障,转至步骤s3,摆臂升起至45
°
,否则感知到前方有墙体等障碍物,转至步骤s4,摆臂放平至0
°
进行避障动作。
[0031]
步骤s4,包括两种情况:步骤s1检测到无障碍物时和步骤s2检测到无法翻越的障碍物时。
[0032]
步骤s5,包括s4的直行、避障动作和步骤s3的越障动作。
[0033]
步骤s6,四周复杂环境转至步骤s7。
[0034]
步骤s7,感知周围环境,识别障碍物特征,转至s1。
[0035]
步骤s8,为反应式行为的摆臂运动控制体系结构。
[0036]
综上参见图3,图3即为移动机器人爬楼梯过程的示意图。
[0037]
以上为本实用新型的具体实施例,但本实用新型的结构特征并不局限于此,本实用新型可以用于类似的产品上,任何本领域的技术人员在本实用新型的领域内,所作的变化或修饰皆涵盖在本实用新型的专利范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

