一种车机地下停车场ar导航方法
技术领域
1.本发明属于车机导航技术领域,具体涉及一种车机地下停车场ar导航方法。
背景技术:
2.随着经济的快速发展与城市化的快速推进,越来越多的家庭拥有私家车,随之而来的是越来越多的对大型地下停车场的需求。但是大型地下停车场往往存在规模庞大、地形复杂、道路交错、寻路困难等问题,严重影响用户体验与使用效率,因此地下停车场内的导航系统越来越受重视。
3.但是由于地下停车场内gps信号受到遮蔽,无法对汽车直接定位,在室外常用的卫星定位导航系统失效。目前室内常用的定位方式包括wifi热点定位、蓝牙信标定位、红外线定位、超声波技术、超宽带技术、惯性导航、视觉定位等,但是这些技术大部分依赖于大规模的硬件部署、数据采集更新以及定期维护等,而且都各有各的局限性,比如wifi易受环境干扰,蓝牙传播距离短、稳定性差,红外、uwb大范围覆盖价格昂贵,惯性导航存在累计误差、无法全局定位,视觉定位对操作限制大、使用功耗高等,因此如何在地下停车场实现汽车稳定的定位导航是目前普遍存在的问题。
4.现代的汽车中一般都装有环视、前视摄像头,可以在程序启动时辅助提供车辆当前位置,其配备的轮速、车轮脉冲和方向盘转角等can数据,可以用于短距离内的航位推算,也可以直接将数据用于预测驾驶行为。而停车场数据的采集管理系统也比较丰富,可以提供停车场内的路网节点及停车位位置与编号等信息。
5.ar导航通过把实景的实时图像叠加导航信息,从而为驾驶员提供更真实的导航信息。然而,目前由于缺乏停车场的地图和定位能力,导致目前市面上没有可在停车场使用的ar导航系统。
技术实现要素:
6.本发明的目的在于提供一种车机地下停车场ar导航方法,以解决现有的问题。
7.为实现上述目的,本发明提供如下技术方案:一种车机地下停车场ar导航方法,包括步骤:
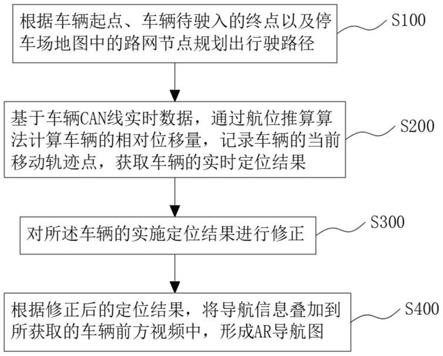
8.根据车辆起点、车辆待驶入的终点以及停车场地图中的路网节点规划出行驶路径;
9.基于车辆can线实时数据,通过航位推算算法计算车辆的相对位移量,记录车辆的当前移动轨迹点,获取车辆的实时定位结果;
10.对所述车辆的实施定位结果进行修正;
11.根据修正后的定位结果,将导航信息叠加到所获取的车辆前方视频中,形成ar导航图。
12.作为本发明一种车机地下停车场ar导航方法优选地,在所述的根据车辆起点、车辆待驶入的终点以及停车场地图中的路网节点规划出行驶路径之前包括步骤:
13.采集停车场数据,根据所述停车场数据建立停车场地图,所述停车场数据包括路网节点、上下坡、左右转、车位位置及车位编号。
14.作为本发明一种车机地下停车场ar导航方法优选地,所述的对所述车辆的实施定位结果进行修正具体包括步骤:
15.对所述停车场地图中的路网节点进行插值,将所述当前移动轨迹点与历史移动轨迹点配准,小幅度修正车辆的定位结果。
16.作为本发明一种车机地下停车场ar导航方法优选地,在所述的s310对所述停车场地图中的路网节点进行插值,将所述当前移动轨迹点与历史移动轨迹点配准,小幅度修正车辆的定位结果之后包括步骤:
17.对所述can线实时数据进行横向比较,预测驾驶行为,匹配地图中定位结果附近的路网节点进行纠偏,进一步修正定位结果。
18.作为本发明一种车机地下停车场ar导航方法优选地,所述can线实时数据包括轮速、车轮脉冲和方向盘转角。
19.作为本发明一种车机地下停车场ar导航方法优选地,所述驾驶行为包括直行、上/下坡、即将左/右转、结束左/右转和会车避让。
20.作为本发明一种车机地下停车场ar导航方法优选地,所述导航信息包括前方的轨迹以及限速信息。
21.本发明与现有技术相比,具有以下有益效果:本发明实现地下停车场中的连续定位导航;利用车辆自带传感器及事先采集的地图实现低成本轻量级的定位导航。
附图说明
22.图1
‑
3为本发明的流程图;
23.图4为本发明的另一个实施例的流程图。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.请参阅图1
‑
图3所示,本发明提供如下技术方案:一种车机地下停车场ar导航方法,包括步骤:
26.s100根据车辆起点、车辆待驶入的终点以及停车场地图中的路网节点规划出行驶路径;
27.s200基于车辆can线实时数据,通过航位推算算法计算车辆的相对位移量,记录车辆的当前移动轨迹点,获取车辆的实时定位结果;
28.s300对所述车辆的实施定位结果进行修正;
29.s400根据修正后的定位结果,将导航信息叠加到所获取的车辆前方视频中,形成ar导航图。
30.本实施例中,通过前视摄像头识别停车场出入口通道或闸机进行定位,也可以通
过驾驶员直接输入起始点附近任意车位编号实现全局定位,结合驾驶员选择的终点与地图路网节点,快速规划出行驶路径。
31.具体地,在所述的s100根据车辆起点、车辆待驶入的终点以及停车场地图中的路网节点规划出行驶路径之前包括步骤:
32.s10采集停车场数据,根据所述停车场数据建立停车场地图,所述停车场数据包括路网节点、上下坡、左右转、车位位置及车位编号。
33.具体地,所述的s300对所述车辆的实施定位结果进行修正具体包括步骤:
34.s310对所述停车场地图中的路网节点进行插值,将所述当前移动轨迹点与历史移动轨迹点配准,小幅度修正车辆的定位结果。
35.具体地,在所述的s310对所述停车场地图中的路网节点进行插值,将所述当前移动轨迹点与历史移动轨迹点配准,小幅度修正车辆的定位结果之后包括步骤:
36.s320对所述can线实时数据进行横向比较,预测驾驶行为,匹配地图中定位结果附近的路网节点进行纠偏,进一步修正定位结果。
37.具体地,所述can线实时数据包括轮速、车轮脉冲和方向盘转角。
38.具体地,所述驾驶行为包括直行、上/下坡、即将左/右转、结束左/右转和会车避让。
39.具体地,所述导航信息包括前方的轨迹以及限速信息。
40.本发明利用车辆摄像头识别停车场出入口、闸机等标志物或由驾驶员直接输入附近任意车位编号快速实现全局定位;利用车辆can数据进行航位推算,与已知的停车场路网信息匹配实现实时定位导航;利用can数据直接预测驾驶行为,结合停车场路网节点信息修正定位;提供在停车场的ar导航能力,把导航信息叠加到当前车辆前方摄像头拍摄到的视频中。
41.如图4所示,本发明的另一个实施例,包括以下步骤:
42.s1训练基于can数据的驾驶行为预测模型:
43.基于车辆的can数据,利用深度学习训练驾驶行为预测模型。
44.s2建立停车场地图:
45.采集停车场数据,并提前建立停车场地图,包含了路网节点、上下坡、左右转、车位位置及编号等信息。
46.s3全局定位模块:
47.通过前视摄像头识别停车场出入口通道或闸机进行定位,也可以通过驾驶员直接输入起始点附近任意车位编号实现全局定位,结合驾驶员选择的终点与地图路网节点,快速规划出行驶路径。
48.s4基于can数据的航位推算:
49.基于车辆can线实时提供的轮速、车轮脉冲、方向盘转角等数据,通过航位推算算法计算相对位移量,从而获得实时定位结果,并记录轨迹点。
50.s5结合停车场路网信息修正定位:
51.对停车场路网节点进行插值,与历史移动轨迹点配准,小幅度修正定位结果。
52.s6预测行为,比对路网节点,校正定位:
53.对车辆can数据进行横向比较,直接预测驾驶行为,是直行、上/下坡、即将左/右
转、结束左/右转还是会车避让等,匹配地图中定位结果附近的路网节点信息进行纠偏,进一步修正定位结果。
54.s7根据定位,把导航信息叠加到车载前方摄像头提供的实时视频。导航信息包括前方的轨迹,以及限速等常用信息。
55.本发明的又一个实施例,包括以下步骤:
56.s01建立停车场地图,重点包含道路、节点及车位编号信息。
57.s02在停车场入口处启动程序,等待车机识别出入口通道或闸机以定位自身所在位置。
58.s03选择终点位置,规划出行驶路径。
59.s04基于实时can数据,推算位移量,匹配道路节点信息,实现在停车场内的连续定位及导航。
60.s05叠加导航信息到车载摄像头,并显示在中控屏上。
61.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

