本发明属于卷烟机械设备技术领域,具体涉及一种切丝机智能控制系统。
背景技术:
在烟草产品生产过程中,通过切丝工序将糖料、水分混合均匀后的叶片按照工艺要求均匀的切成宽度一致的烟丝,从而供后续烘丝工序使用。而在切丝和烘丝两道工序间需要设置一个缓存喂料仓以保证稳定的烘丝流量。如果切丝机刀辊转速设置过低,则会导致喂料仓走空跟不上烘丝生产流量;如果切丝机刀辊转速设置过高,则会导致喂料仓装满,切丝机及沿线设备频繁启停。
目前,切丝机完全依靠操作人员以人工方式独立控制,操作人员自身根据喂料仓物料量和长期积累的经验来设定切丝机刀辊的转速。然而,这种人工控制方式很难实现对切丝机的准确控制,不利于切丝、烘丝工序的稳定进行。
技术实现要素:
本发明的目的在于针对现有技术的不足之处,提供一种能够实现对切丝机进行智能化控制的切丝机智能控制系统。
为解决上述技术问题,本发明采用如下技术方案:
一种切丝机智能控制系统,安装于连接在切丝机与烘丝机之间的喂料装置上,用于控制所述切丝机的刀辊转速,所述喂料装置包括:顶部具有开口结构的喂料仓、可移动设置在所述喂料仓顶部用于进行物料布料的布料车,所述喂料仓内部底面设有用于将物料输送至所述烘丝机中的喂料输送机构,其特征在于,所述切丝机智能控制系统包括:
料仓容量检测模块,设置在所述喂料仓的外侧壁上,用于在所述布料车进行布料过程中实时检测所述喂料仓内的物料容量;以及
控制模块,获取所述料仓容量检测模块检测到的物料容量,并且在检测到的所述物料容量达到预定容量时反馈相应的控制信号至所述切丝机中以便于进行刀辊转速控制。
较佳地,在该切丝机智能控制系统中,所述料仓容量检测模块包括沿所述喂料输送机构的输送方向依次间隔设置在所述喂料仓的侧壁上的初检单元以及设置在所述喂料输送机构的后段区域的精检单元。
较佳地,在该切丝机智能控制系统中,所述初检单元包括等间距设置在所述喂料仓的前部、中部和后部并用于感应对应区域内的物料的三个对射式光电开关。
较佳地,在该切丝机智能控制系统中,所述精检单元包括沿所述输送方向设置在后两个所述对射式光电开关之间的光栅传感器。
较佳地,在该切丝机智能控制系统中,所述精检单元还包括沿所述输送方向设置在所述喂料仓的后侧壁的预定高度位置上的超声波测距仪。
较佳地,在该切丝机智能控制系统中,所述控制单元基于所述光栅传感器和所述超声波测距仪的检测结果得到所述物料容量,并基于该物料容量所对应的预设的刀辊转速值发送控制信号至所述切丝机中。
较佳地,在该切丝机智能控制系统中,还包括:布料高度检测模块,固定在所述布料车上并且朝向所述喂料仓内设置,用于检测物料的布料高度,
所述控制模块获取检测到的布料高度,并且在所述布料高度达到预定高度时控制布料车沿与所述输送方向相反的方向移动以进行持续布料。
较佳地,在该切丝机智能控制系统中,还包括:行程限位模块,包括所述输送方向设置在所述布料车两端的限位感应器以及设置在所述喂料仓的对应位置上的限位件,
所述控制模块在所述限位感应器感应到对应的所述限位件时控制所述布料车反向移动。
与现有技术相比,本发明的有益效果为:通过从喂料仓外部对喂料仓内的烟丝容量进行实时检测,从而实现对切丝机的自动控制,平衡切丝后喂料仓暨烘丝前喂料仓内的物料缓存量,既满足后道工序流量需求,又避免喂料仓满仓使切丝机及沿线输送设备频繁启停,避免了喂料仓内部的烟丝灰尘等对测量精度造成干扰,使得切丝机流量控制更精准可靠,极大降低了设备损耗,实现无人值守,提高了生产智能化程度。
附图说明
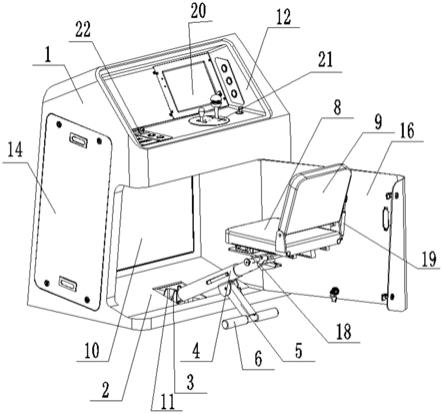
图1是本发明的实施例中切丝机智能控制系统的结构示意图。
其中,100—切丝机智能控制系统200—喂料装置1—喂料仓2—布料车10—料仓容量检测模块20—布料高度检测模块30—行程限位模块11—初检单元12—精检单元111—前位对射式光电开关112—中位对射式光电开关113—后位对射式光电开关121—光栅传感器122—超声波测距仪21—前位漫反射式光电开关22—后位漫反射式光电开关31—限位感应器311—前位接近开关312—后位接近开关
具体实施方式
下面结合附图所示的实施例对本发明作进一步说明。
如附图1所示,本实施例公开了一种切丝机智能控制系统100,安装于喂料装置200上,该喂料装置200连接在图中未显示的切丝机与烘丝机之间,通过该切丝机智能控制系统100实现对切丝机的刀辊转速进行自动控制,从而满足切丝机与烘丝机的智能化生产。切丝机用于对烟草叶片执行切丝工序,并且将切丝完成的烟丝被输送至喂料装置200中,然后由喂料装置200朝向烘丝机进行喂料,从而让烟丝在烘丝机中被执行烘干等工序。
具体地,如图1所示,喂料装置200包括:喂料仓1、布料车2以及图中未画出的喂料输送机构。
喂料仓1为长方体的箱体,其顶面为开口结构,在该开口内沿切丝机朝向烘丝机的方向设置两根导轨;布料车2可移动设置在两根导轨上,并且,布料车2的底部设有朝向喂料仓1的下料口;喂料输送机构设置在喂料仓1内部的底面上。基于喂料装置200的具体结构,通过布料车2在喂料仓1的顶部来回移动实现朝向喂料仓1内部布料或下料,具体是通过下料口将烟丝撒落到喂料仓1内部的喂料输送机构上,然后,通过喂料输送机构将烟丝输送到烘丝机内。
基于上述喂料装置200的具体结构,切丝机智能控制系统100的具体结构与功能如下:
如图1所示,切丝机智能控制系统100包括:料仓容量检测模块10、布料高度检测模块20、行程限位模块30以及图中未画出的控制模块。
料仓容量检测模块10设置在喂料仓1的外侧壁上,用于在布料车2进行布料过程中实时检测喂料仓1内的物料容量,即布料长度。具体地,料仓容量检测模块10包括:初检单元11和精检单元12。
初检单元11沿喂料输送机构的输送方向依次间隔设置在喂料仓1的侧壁上,并且与喂料输送机构相对应,用于初步检测喂料输送机构上的烟丝容量,即喂料仓1内的物料容量。这里,通过初检单元11从喂料仓1的外部进行检测,避免了喂料仓内因烟丝撒落导致的烟丝灰尘等影响检测精度。具体地,初检单元11包括等间距设置在喂料仓1的前端、中部和后端位置上并用于感应对应区域内的烟丝物料的三个对射式光电开关,分别为前位对射式光电开关111、中位对射式光电开关112和后位对射式光电开关113。这里,喂料仓1的侧壁为透明的有机玻璃面,三个对射式光电开关设置在有机玻璃的外壁面上,透过有机玻璃朝对应方向照射,从而对烟丝进行检测。当中位对射式光电开关112检测到烟丝时,即光电信号被烟丝遮挡时,则初步认为烟丝的容量已达到半仓状态;当后位对射式光电开关113检测到烟丝时,即光电信号被烟丝遮挡时,则初步认为烟丝容量已达到满仓状态。
精检单元12设置在喂料输送机构的后段区域内,用于精确检测烟丝物料从仓头到仓尾的布料长度。具体是从半仓以上的容量开始检测,主要是在烟丝容量未达到半仓时,需要快速有序进行布料;而当烟丝容量达到半仓时,若不对应调整切丝机的刀辊转速,则会导致喂料仓1内的烟丝容量过多直至满仓,势必需要停止切丝机及其沿线设备,不利于智能化生产。
精检单元12包括沿喂料输送机构的输送方向设置在中位对射式光电开关112和后位对射式光电开关113之间的光栅传感器121,光栅传感器121同样设置在喂料仓1的有机玻璃的外壁面上,且其自身具有一定的长度,透过有机玻璃朝对应方向照射从而对烟丝进行检测,判断出当前烟丝的容量,即布料长度。同样地,通过精检单元12从喂料仓1的外部进行检测,避免了喂料仓内因烟丝撒落导致的烟丝灰尘等影响检测精度。
由于烟丝是由布料车2的下料口以朝向喂料仓1内撒落的方式进行布料,势必会导致烟丝在喂料仓1内部呈堆垛状。为了避免堆垛的斜面对光栅传感器121的检测准确度造成干扰,精检单元12还包括一个超声波测距仪122,该超声波测距仪122沿输送方向设置在喂料仓1的后侧壁的预定高度位置上,即喂料仓1的仓尾安全门附近,用于沿喂料输送机构的输送方向检测烟丝,也就是朝向喂料仓的前部方向照射从而实现检测。通过在该高度位置上检测到的烟丝的布料长度与光栅传感器检测到的烟丝的布料长度进行比对,当两者的差值在预定范围内时,取两者的平均值作为烟丝的布料长度;当两者的差值超过预定范围时,则取预先设置好的常数作为烟丝的布料长度。
布料车2在布料过程中,若当前位置布料的烟丝堆垛已达到喂料仓1的顶部位置时,需要控制布料车2沿与喂料输送机构的输送方向相反的方向移动以均匀布料,使喂料输送机构上充满烟丝,保证喂料的流量需求。因此,为了控制布料车2智能化移动,在布料车2上设置了布料高度检测模块20,该布料高度检测模块20朝向喂料仓1的内部设置,从而能够实时检测烟丝物料的布料高度。在具体实施时,布料高度检测模块20选用的是漫反射式光电开关,设置在布料车2的前后两端,分别是前位漫反射式光电开关21和后位漫反射式光电开关22,用来对当前布料的烟丝物料的堆垛高度作为布料高度。当检测的布料高度小于预定高度时,需继续定点下料;当检测的布料高度达到预定高度时,控制布料车2步进移动以对喂料输送机构进行均匀布料。
布料车2在布料过程中的移动行程受限于喂料仓1的顶部开口的长度,当布料车2移动至喂料仓1的两端部位置时,需控制布料车2反向移动,以避免造成设备损坏。因此,该切丝机智能控制系统100还设置了行程限位模块30来对布料车2的移动行程进行限制。具体地,行程限位模块30包括:沿喂料输送机构的输送方向设置在布料车2的两端的限位感应器31以及图中未显示的设置在喂料仓1的顶部的对应位置上的限位件,当限位感应器31检测到对应的限位件时,说明布料车已移动至该方向的极限位置。在具体实施时,限位传感器31选用的是接近开关,分别为前位接近开关311和后位接近开关312,当接近开关感应到对应的金属材质的限位件时,则说明布料车2已达到该方向的极限位置,需要转变移动方向,即调头。
控制模块分别与料仓容量检测模块10、布料高度检测模块20以及行程限位模块30相连接,通过获取对应检测到的数值或信号进行相应地控制动作,具体如下:
控制模块获取料仓容量检测模块10检测到的物料容量,并且在检测到的物料容量达到预定容量时反馈相应的控制信号至切丝机中,从而让切丝机对其刀辊转速进行相应控制。具体是,根据光栅传感器121和超声波测距仪122的检测结果得到物料容量,并基于该物料容量所对应的预设的刀辊转速值发送控制信号至切丝机中。这里的控制信号可以是烟丝的容量值,也可以是烟丝容量值对应的刀辊转速,烟丝容量值与刀辊转速已通过pid计算模拟出对应的关系曲线,也就是说,已知烟丝容量值即可获得刀辊转速。另外,控制模块具体是与切丝机的远程控制接口相通信连接。
控制模块获取布料高度检测模块20检测到的布料高度,并且在布料高度达到预定高度时控制布料车2沿与输送方向相反的方向移动以进行布料。
控制模块在限位感应器31感应到对应的限位件时控制布料车2反向移动。
基于上述结构,切丝机智能控制系统通过从喂料仓外部对喂料仓内的烟丝容量进行实时检测,从而实现对切丝机的自动控制,平衡切丝后喂料仓暨烘丝前喂料仓内的物料缓存量,既满足后道工序流量需求,又避免喂料仓满仓使切丝机及沿线输送设备频繁启停,避免了喂料仓内部的烟丝灰尘等影响检测精度,使得切丝机流量控制更精准可靠,极大降低了设备损耗,实现无人值守,提高了生产智能化程度。
本发明的保护范围不限于上述的实施例,显然,本领域的技术人员可以对本发明进行各种改动和变形而不脱离本发明的范围和精神。倘若这些改动和变形属于本发明权利要求及其等同技术的范围,则本发明的意图也包含这些改动和变形在内。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。