1.本发明为一种后处理器高压吹扫清灰装置,属于后处理器清理设备领域。
背景技术:
2.柴油车发动机尾气排放中有两个有害成份:pm炭烟颗粒物和氮氧化合物(nox)。针对车辆尾气中的pm碳烟颗粒物,要求加装dpf碳烟颗粒捕捉器。
3.目前,柴油车国六后处理器是将doc、dpf、scr,三种不同功能的后处理器串联在一起。前级doc催化器氧化与发动机燃烧产生的no生成no2。进入dpf后,no2分子键在较低温度(250℃左右)即可断裂,产生的氧气与被捕捉的c颗粒燃烧生成co2。柴油车大部分的普通行驶工况都能满足dpf中的再生温度(250℃~500℃)因此可以有效的去除pm碳烟颗粒物。但是dpf在收集处理发动机燃烧后排出的碳烟颗粒物时,被燃烧掉的只是碳颗粒,而灰分是无法燃烧的,随着时间的积累,dpf中的碳灰会越积越多,因此需要对dpf做定期清灰处理。常规方法是采用电炉烘烤,将dpf中积累的碳颗粒燃烧掉,不能燃烧的灰分则要通过高压气枪手工吹灰,dpf的直径大小不一,网眼数量在一万到三万个之间,手工吹灰需要将网眼逐个吹通,工作量巨大,且无法精确把握所有蜂窝网眼都被吹扫到位,更重要的是手工吹灰导致灰尘弥漫在空气中,会对环境造成二次污染。
技术实现要素:
4.为解决上述技术问题,本发明提出一种专用于柴油机尾气后处理器dpf的高压气体自动化清灰装置。
5.为实现上述技术目的,本发明提供的技术方案为:
6.一种后处理器高压吹扫清灰装置,包括:底座、高压吹扫模块和集灰模块;
7.所述底座上设置有尖端向下的圆锥形空腔,且圆锥形空腔下端设置有通孔;
8.所述高压吹扫模块包括高压气体喷头,所述高压气体喷头设置于圆锥形空腔上方,所述高压气体喷头用于向dpf后处理器排气端注入高压气流;
9.所述通孔与集灰模块连通。
10.所述后处理器高压吹扫清灰装置还包括光检测模块,所述光检测模块包括:支撑底座和光源,所述支撑底座上设置有凹槽或者开口,所述光源设置于凹槽或者开口内,且光源上端低于支撑底座上端面。
11.所述底座还包括密封垫,所述密封垫设置于圆锥形空腔内,且密封垫是与圆锥形空腔相适应的漏斗结构,所述密封垫采用硅胶。
12.所述高压气体喷头为不锈钢管头部套有硅胶管,且硅胶管内径为1.0~3.0cm。
13.所述高压吹扫模块还包括:高压气源和移动模块,所述高压气源与高压气体喷头连通,所述高压气源为高压气体喷头提供高压气流,所述高压气体喷头与移动模块固定连接,所述移动模块实现高压气体喷头在三维空间内移动。
14.所述高压气源包括:主罐和子罐,所述主罐输入口与气泵或者外置空气压缩机连
通,所述主罐输出口与子罐连通,所述主罐与子罐连通管路上设置有电磁阀a,所述子罐输出端与高压气体喷头连通,所述子罐与高压气体喷头管路上设置有电磁阀b;
15.所述主罐和子罐内均设置有气体压力传感器。
16.所述移动模块包括:x轴螺母丝杆、y轴螺母丝杆、z轴螺母丝杆和步进电机;所述x轴螺母丝杆包括:x丝杆和x滚珠螺母,所述y轴螺母丝杆包括:y丝杆和y滚珠螺母,所述z轴螺母丝杆包括:z丝杆和z滚珠螺母,
17.所述x丝杆水平固定于圆锥形空腔上方,所述y丝杆一端与x滚珠螺母固定连接,所述y丝杆另一端与x丝杆相平行滑轨的滑块固定连接,且y丝杆与x丝杆相垂直,所述y滚珠螺母上竖直设置有z丝杆,所述高压气体喷头固定于z滚珠螺母上,所述步进电机有三个,三个步进电机与x丝杆、y丝杆和z丝杆一一对应的同轴固定连接。
18.所述集灰模块包括:风机和水箱,所述风机进口与通孔连通,所述风机出口连通水箱底部,所述水箱内填充液体;
19.所述风机与通孔连通的管路上设置有空气负压压力检测传感器。
20.所述后处理器高压吹扫清灰装置还包括电子秤,所述电子秤用于检测dpf后处理器吹扫前后质量。
21.所述后处理器高压吹扫清灰装置还包括控制模块,所述控制模块包括:控制中心、显示面板、电源、启动按钮和急停按钮;所述控制中心分别与三个步进电机、风机、显示面板、光源和检测传感器电气连接,所述电源为后处理器高压吹扫清灰装置提供电力,所述启动按钮和急停按钮设置于电源供电总线上。本发明与现有技术相比具有以下有益效果:
22.一、本发明采用高压吹扫模块,可通过高压气体喷头同时对多个后处理器孔眼进行空气吹扫疏通,同时后处理器经过高温处理后,内部积存灰烬在气体吹扫作用下完成彻底清除,由于高压气体压力可设置,因此不会因过高气体压力导致dpf后处理器网眼损坏。
23.二、本发明采用集灰模块,可收集灰烬,同时经过水箱可实现灰烬便捷收集,避免二次污染环境。
24.三、本发明采用光检测模块,可对dpf后处理器清理效果进行直接判断,通过dpf的壁流孔泛光强度来检测dpf后处理器蜂窝网眼的疏通率。
25.四、本发明采用风机,结合密封垫,造成圆锥形空腔内为负压环境,避免扬起的灰烬再次进入dpf后处理器蜂窝网眼内。
附图说明
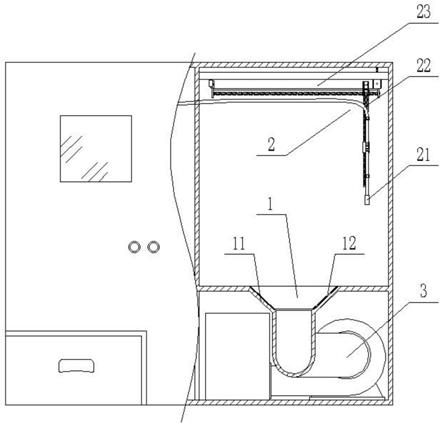
26.图1为本发明实施例结构示意图。
27.图2为本发明光检测模块实施例1结构示意图。
28.图3为本发明光检测模块实施例2结构示意图。
29.图4为本发明移动模块结构示意图。
30.图5为本发明集灰模块结构示意图。
31.图6为本发明
32.图中:1为底座,2为高压吹扫模块,3为集灰模块,4为光检测模块,11为圆锥形空腔,12为密封垫,21为高压气体喷头,22为高压气源,23为移动模块,31为风机,32为水箱,33为空气负压压力检测传感器,41为支撑底座,42为光源,43为检测传感器,221为主罐,222为
子罐,223为气体压力传感器。
具体实施方式
33.为进一步理解本发明,下面结合附图和实施例详细阐述:
34.实施例1
35.一种后处理器高压吹扫清灰装置,包括:底座1、高压吹扫模块2和集灰模块3;
36.所述底座1上设置有尖端向下的圆锥形空腔11,且圆锥形空腔11下端设置有通孔;
37.所述高压吹扫模块2包括高压气体喷头21,所述高压气体喷头21设置于圆锥形空腔11上方,所述高压气体喷头21用于向dpf后处理器排气端注入高压气流;
38.所述通孔与集灰模块3连通。
39.所述后处理器高压吹扫清灰装置还包括光检测模块4,所述光检测模块4包括:支撑底座41和光源42,所述支撑底座41上设置有凹槽或者开口,所述光源42设置于凹槽或者开口内,且光源42上端低于支撑底座41上端面。
40.所述底座1还包括密封垫12,所述密封垫12设置于圆锥形空腔11内,且密封垫12是与圆锥形空腔11相适应的漏斗结构,所述密封垫12采用硅胶。
41.所述高压气体喷头21为不锈钢管头部套有硅胶管,且硅胶管内径为1.0~3.0cm。
42.所述高压吹扫模块2还包括:高压气源22和移动模块23,所述高压气源22与高压气体喷头21连通,所述高压气源22为高压气体喷头21提供高压气流,所述高压气体喷头21与移动模块23固定连接,所述移动模块23实现高压气体喷头21在三维空间内移动。
43.所述高压气源22包括:主罐221和子罐222,所述主罐221输入口与气泵或者外置空气压缩机连通,所述主罐221输出口与子罐222连通,所述主罐221与子罐222连通管路上设置有电磁阀a,所述子罐222输出端与高压气体喷头21连通,所述子罐222与高压气体喷头21管路上设置有电磁阀b;
44.所述主罐221和子罐222内均设置有气体压力传感器223。
45.所述移动模块23包括:x轴螺母丝杆、y轴螺母丝杆、z轴螺母丝杆和步进电机;所述x轴螺母丝杆包括:x丝杆和x滚珠螺母,所述y轴螺母丝杆包括:y丝杆和y滚珠螺母,所述z轴螺母丝杆包括:z丝杆和z滚珠螺母,
46.所述x丝杆水平固定于圆锥形空腔11上方,所述y丝杆一端与x滚珠螺母固定连接,所述y丝杆另一端与x丝杆相平行滑轨的滑块固定连接,且y丝杆与x丝杆相垂直,所述y滚珠螺母上竖直设置有z丝杆,所述高压气体喷头21固定于z滚珠螺母上,所述步进电机有三个,三个步进电机与x丝杆、y丝杆和z丝杆一一对应的同轴固定连接。
47.所述集灰模块3包括:风机31和水箱32,所述风机31进口与通孔连通,所述风机31出口连通水箱32底部,所述水箱32内填充液体;
48.所述风机31与通孔连通的管路上设置有空气负压压力检测传感器33。
49.所述后处理器高压吹扫清灰装置还包括电子秤,所述电子秤用于dpf后处理器吹扫前后质量。
50.所述后处理器高压吹扫清灰装置还包括控制模块,所述控制模块包括:控制中心、显示面板、电源、启动按钮和急停按钮;所述控制中心分别与三个步进电机、风机31、显示面板、光源42和电气连接,所述电源为后处理器高压吹扫清灰装置提供电力,所述启动按钮和
急停按钮设置于电源供电总线上。
51.本实施例操作和应用过程如下:dpf经过电烤炉烘烤后降温,dpf在清理之前可进行称重,然后放置于支撑底座41上,且dpf边缘与密封垫紧密接触,确保dpf中心与通孔中心对齐,通过显示面板向系统提供dpf参数:包括dpf高度和大小,启动高压吹扫模块2,高压气源22为高压气体喷头21提供高压气流,通过控制模块可提前设定主罐221和子罐222内部压力,所述将气体压力传感器感知的主罐221和子罐222与设定值进行比较,进而控制电磁阀a和电磁阀b启闭,具体的:主罐221压力大于子罐222,工作时,子罐222通过高压气体喷头21瞬间排放气体,实现高压吹扫的目的,此时移动模块23带动高压气体喷头21进入下一个工作位,在此间隙,主罐221向子罐222瞬间补充压力,子罐222达到设定压力后,主罐221停止向子罐222供气,子罐222再次进入工作状态,主罐221在高压气体喷头21工作过程中补充气体,如此实现重复动作。
52.移动模块23控制高压气体喷头21在dpf上依次吹扫,同时启动风扇,将灰烬排放至水箱32内,所述圆锥形空腔11在风扇作用下形成负压,空气负压压力检测传感器33的数值可直接反应dpf疏通状态,另外,完成后可再次对dpf称重来判断清灰质量,且可放置于光检测模块4内通过肉眼观察判断dpf孔眼疏通效果。
53.实施例2
54.如图1至图4所示:本发明所述一种后处理器高压吹扫清灰装置,包括:底座1、高压吹扫模块2和集灰模块3;
55.所述底座1上设置有尖端向下的圆锥形空腔11,且圆锥形空腔11下端设置有通孔;
56.所述高压吹扫模块2包括高压气体喷头21,所述高压气体喷头21设置于圆锥形空腔11上方,所述高压气体喷头21用于向dpf后处理器排气端注入高压气流;
57.所述通孔与集灰模块3连通。
58.所述后处理器高压吹扫清灰装置还包括光检测模块4,所述光检测模块4包括:支撑底座41和光源42,所述支撑底座41上设置有凹槽或者开口,所述光源42设置于凹槽或者开口内,且光源42上端低于支撑底座41上端面;
59.所述光检测模块4还包括:光强度传感器43,所述光强度传感器43设置于光源42正上方。
60.所述底座1还包括密封垫12,所述密封垫12设置于圆锥形空腔11内,且密封垫12是与圆锥形空腔11相适应的漏斗结构,所述密封垫12采用硅胶。
61.所述高压气体喷头21为不锈钢管头部套有硅胶管,且硅胶管内径为1.0~3.0cm。
62.所述高压吹扫模块2还包括:高压气源22和移动模块23,所述高压气源22与高压气体喷头21连通,所述高压气源22为高压气体喷头21提供高压气流,所述高压气体喷头21与移动模块23固定连接,所述移动模块23实现高压气体喷头21在三维空间内移动。
63.所述高压气源22包括:主罐221和子罐222,所述主罐221输入口与气泵或者外置空气压缩机连通,所述主罐221输出口与子罐222连通,所述主罐221与子罐222连通管路上设置有电磁阀a,所述子罐222输出端与高压气体喷头21连通,所述子罐222与高压气体喷头21管路上设置有电磁阀b;
64.所述主罐221和子罐222内均设置有气体压力传感器223。
65.所述移动模块23包括:x轴螺母丝杆、y轴螺母丝杆、z轴螺母丝杆和步进电机;所述
x轴螺母丝杆包括:x丝杆和x滚珠螺母,所述y轴螺母丝杆包括:y丝杆和y滚珠螺母,所述z轴螺母丝杆包括:z丝杆和z滚珠螺母,
66.所述x丝杆水平固定于圆锥形空腔11上方,所述y丝杆一端与x滚珠螺母固定连接,所述y丝杆另一端与x丝杆相平行滑轨的滑块固定连接,且y丝杆与x丝杆相垂直,所述y滚珠螺母上竖直设置有z丝杆,所述高压气体喷头21固定于z滚珠螺母上,所述步进电机有三个,三个步进电机与x丝杆、y丝杆和z丝杆一一对应的同轴固定连接。
67.所述集灰模块3包括:风机31和水箱32,所述风机31进口与通孔连通,所述风机31出口连通水箱32底部,所述水箱32内填充液体;
68.所述风机31与通孔连通的管路上设置有空气负压压力检测传感器33。
69.所述后处理器高压吹扫清灰装置还包括电子秤,所述电子秤用于dpf后处理器吹扫前后质量。
70.所述后处理器高压吹扫清灰装置还包括控制模块,所述控制模块包括:控制中心、显示面板、电源、启动按钮和急停按钮;所述控制中心分别与三个步进电机、风机31、显示面板、光源42和光强度传感器43电气连接,所述电源为后处理器高压吹扫清灰装置提供电力,所述启动按钮和急停按钮设置于电源供电总线上。
71.所述光源42为发光二极管。
72.所述风机31为离心风机31。
73.所述高压气源22包括:气泵、高压气罐和安全阀,所述高压气罐进气口与气泵连通,所述高压气罐排气口通过软管与高压气体喷头21连通,所述高压气罐上还设置有安全阀,防止高压气罐内部压力过大。
74.所述软管还设置有电磁阀,所述电磁阀与控制中心电气连接。
75.所述控制中心为plc或者单片机。
76.所述高压吹扫模块2一侧设置有控制模块,所述高压吹扫模块2下方设置有集灰模块3,所述控制模块后部空间设置有光检测模块4。
77.本实施例具体实施方式如下:
78.dpf经过电烤炉烘烤后降温,dpf在清理之前可进行称重,然后放置于支撑底座41上,且dpf边缘与密封垫紧密接触,确保dpf中心与通孔中心对齐,通过显示面板向系统提供dpf参数:包括dpf高度和大小,启动高压吹扫模块2,高压气源22为高压气体喷头21提供高压气流,通过控制模块可提前设定主罐221和子罐222内部压力,所述将气体压力传感器感知的主罐221和子罐222与设定值进行比较,进而控制电磁阀a和电磁阀b启闭,具体的:主罐221压力大于子罐222,工作时,子罐222通过高压气体喷头21瞬间排放气体,实现高压吹扫的目的,此时移动模块23带动高压气体喷头21进入下一个工作位,在此间隙,主罐221向子罐222瞬间补充压力,子罐222达到设定压力后,主罐221停止向子罐222供气,子罐222再次进入工作状态,主罐221在高压气体喷头21工作过程中补充气体,如此实现重复动作。
79.移动模块23控制高压气体喷头21在dpf上依次吹扫,同时启动风扇,将灰烬排放至水箱32内,所述圆锥形空腔11在风扇作用下形成负压,空气负压压力检测传感器33的数值可直接反应dpf疏通状态,另外,完成后可再次对dpf称重来判断清灰质量,且可放置于光检测模块4内通过光强度传感器43观察判断dpf孔眼疏通效果。
80.上述实施方式仅示例性说明本发明的原理及其效果,而非用于限制本发明。对于
熟悉此技术的人皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改进。因此,凡举所述技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

