1.本发明涉及水轮机调速器检测技术领域,具体涉及一种基于图像识别技术的水轮机调速器条码测频方法及装置。
背景技术:
2.水轮机调速器一般采用齿盘测频和pt残压测频两种方法测量机组转速。开机和停机过程低速阶段优先选用齿盘测频方式,空载或负载状态优先选用pt残压测频方式。齿盘测速方式需要在水轮机大轴上固定安装一圈带有金属凸齿的齿带,并在齿带周围布置金属探测传感器进行检测,控制器根据传感器上送的测量信号进行逻辑处理,计算出水轮机转速。齿轮测速方式面临以下问题:
①
、金属齿带凸齿间距要求均等,且齿面处于同心圆面上,对加工工艺要求高,加工精度很难达到标准要求,不易加工。若加工精度不高会导致水轮机调速器频率测量精度不达标。
3.②
、金属齿带安装难度大,要求安装平面水平且齿面处于同心圆面上,齿带环抱水轮机大轴牢靠不会下滑,对安装工艺要求高,不易安装。若齿带安装不合格会导致水轮机调速器频率测量精度不达标。
4.③
、金属探测传感器安装位置对安装工艺要求高,不易安装,金属探传感器与金属齿带凸齿安装间距要与传感器性能要求相匹配,很难人工调整。
5.④
、金属探测传感器易受外部环境电磁干扰。
6.上述问题反应出齿轮测速方式对齿带的加工安装和传感器的性能要求很高,不易安装和维护,且装置成本高。
技术实现要素:
7.为解决上述技术问题,本发明提供一种基于图像识别技术的水轮机调速器条码测频方法及装置,不易受周围环境的电磁干扰影响,且条码齿带加工安装简单方便,易维护;成本低、结构简单。
8.本发明采取的技术方案为:基于图像识别技术的水轮机调速器条码测频方法,通过摄像机采集水轮机大轴上的条码齿带图像信息;然后通过图像处理装置运用图像识别技术进行图像分析处理,根据水轮机大轴转动时摄像机采集的视频图像条码,生成条码数据信息,根据条码数据信息中的角度信息以及条码在图像中位置,处理后输出大轴角度位置信息给调速器控制器,最后通过调速器控制器根据采集的大轴角度位置信息,精确计算出水轮机调速器转速频率。
9.基于图像识别技术的水轮机调速器条码测频装置,包括:条码齿带,首尾相连环绕安装于水轮机大轴上;摄像机,安装于条码齿带旁,摄像机的镜头对准条码齿带平面,用以拍摄获取水轮机大轴旋转时条码齿带的条码图像;
图像处理装置,采集摄像机拍摄获取的图像信息,并运用图像识别技术进行图像处理,采用条码编码解码方法进行解码,生成条码数据信息,根据条码数据信息中的角度信息以及条码在图像中位置,处理后输出大轴角度位置信息;调速器控制器,采集图像处理装置输出的大轴角度位置信息,根据大轴角度位置数据,计算出水轮机大轴的转动频率,然后根据发电机磁极对数,计算出水轮机调速器转速频率。
10.本发明一种基于图像识别技术的水轮机调速器条码测频方法及装置,技术效果如下:1)采用本发明的一种基于图像识别技术的水轮机调速器条码测频方法和装置,进行水轮机调速器测频,可以明显消除测频过程中电磁干扰信号的影响。
11.2)条码齿带对加工工艺要求不高,易加工。
12.3)条码齿带和摄像机对安装工艺要求也不高,易安装。
附图说明
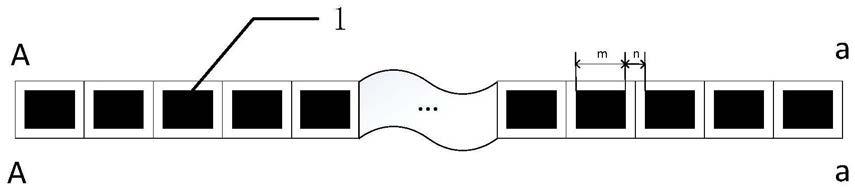
13.图1是条码齿带形状示意图。
14.图2是本发明一种基于图像识别技术的水轮机调速器测频装置结构图。
15.图3是本发明一种基于图像识别技术的水轮机调速器条码测频方法流程图。
具体实施方式
16.基于图像识别技术的水轮机调速器条码测频方法,通过摄像机3采集水轮机大轴1上的条码齿带2图像信息;然后通过图像处理装置4运用图像识别技术进行图像分析处理,根据水轮机大轴1转动时摄像机3采集的视频图像条码,生成条码数据信息,根据条码数据信息中的角度信息以及条码在图像中位置,输出大轴角度位置信息给调速器控制器5,最后通过调速器控制器5根据采集的大轴角度位置信息,精确计算出水轮机调速器转速频率。
17.如图1、图2所示,基于图像识别技术的水轮机调速器条码测频装置,包括:条码齿带2,首尾相连环绕安装于水轮机大轴1上。条码齿带2为条码等距分布的平面齿带,条码齿带2形状示意图如图1所示,条码按照条码设计方法均匀分布于条码齿带2上,安装时a
‑
a和a
‑
a相连。安装完成后,条码齿带2为一个圆环,设圆的半径为r。单个条码所占的区域大于相邻条码间的空白区域,设单个条码所占的区域在旋转方向上的长度为m,相邻条码间的空白区域在旋转方向上的长度为n,m>n。条码齿带2上按照角度位置信息进行条形编码,条码编码解码方法可采取以公开的成熟的正弦条码尺编码解码方法、三周期等间隔编码解码方法等其他方法。
18.摄像机3,安装于条码齿带2旁,摄像机3的镜头对准条码齿带2平面,用以拍摄获取水轮机大轴1旋转时条码齿带2的条码图像。摄像机3拍摄的条码图像大小恰好为条码齿带2上单个条码所占的区域加上两个相邻条码间的空白区域的大小,即摄像机3拍摄的条码图像区域在旋转方向上的长度为m 2n,从而保证摄像机3拍摄的条码图像至少有一个完整的条码,且不会同时有两个完整的条码。
19.图像处理装置4,采集摄像机3拍摄获取的图像信息,并运用图像识别技术进行图像处理,采用条码编码解码方法进行解码,获取条码数据信息,根据条码数据信息中的角度
信息以及条码在图像中位置,实时输出大轴角度位置信息。
20.调速器控制器5,采集图像处理装置4输出的大轴角度位置信息,根据大轴角度位置以及间隔时间δt前原大轴角度位置,计算出水轮机大轴1的转动频率,然后根据发电机磁极对数,计算出水轮机调速器转速频率。
21.摄像机3可根据所需要的摄像图像分辨率和视频帧率,可采用昂纳公司旗下o
‑
net品牌型号为sc
‑
k系列及sc
‑
d系列工业相机。
22.图像处理装置4包括图像采集、图像处理和图像输出功能,可采用昂纳公司旗下o
‑
net品牌的sv通用视觉系统。
23.调速器控制器5采用b&r品牌型号为pcc2005的控制器,cpu模块型号为3cp380.60
‑
1。
24.条码编码解码方法可采取已公开的成熟的正弦条码尺编码解码方法、三周期等间隔编码解码方法等其他方法。详见中国矿业大学作者西秀秀的硕士学位论文《基于条码尺图像分析的闸门开度测量方法研究》中第二章条码尺基本原理及新型条码尺设计相关内容。
25.如图3所示,基于图像识别技术的水轮机调速器条码测频方法,包括以下步骤:步骤1:摄像机3拍摄获取水轮机大轴1旋转时条码齿带2的图像;步骤2:图像处理装置4实时采集摄像机3拍摄获取的图像信息,生成条码数据信息,根据条码数据信息中的角度信息以及条码在图像中位置,处理后输出大轴角度位置信息;步骤2包括以下步骤:步骤2.1:图像处理装置4采集摄像机3拍摄获取的图像信息,进入步骤2.2;步骤2.2:图像处理装置4根据图像信息,运用图像识别技术进行图像处理,采用条码编码解码方法进行解码,获得条码数据信息角度α
条码
,并根据条码在图像中位置对α
条码
进行修正,修正值α
修正
与条码中心点在图像中旋转方向上的位置一一对应,修正值α
修正
大小与条码中心点在图像中旋转方向上距离图像中心点的偏移位移x正相关,且旋转方向为正,x∈[
‑
n,n],正相关比例系数k=1/r,即α
修正
=kx=x/r,实时输出大轴角度位置信息α=α
条码
α
修正
,返回步骤2.1。
[0026]
步骤3:调速器控制器5实时采集图像处理装置4输出的大轴角度位置信息,实时计算出水轮机调速器转速频率。
[0027]
步骤3包括以下步骤:步骤3.1:调速器控制器5初始化,采集图像处理装置4输出的大轴角度位置信息θ,上一周期大轴角度位置信息θ
原
=θ,进入步骤3.2;步骤3.2:调速器控制器5实时采集图像处理装置4输出的大轴角度位置信息θ,进入步骤3.3;步骤3.3:调速器控制器5计算水轮机大轴1的转动频率f1=(θ
‑
θ
原
)/(2πδt),进入步骤3.4;步骤3.4:调速器控制器5根据发电机磁极对数n,计算出水轮机调速器转速频率f=n*f1=(θ
‑
θ
原
)n/(2πδt),进入步骤3.5;步骤3.5:上一周期大轴角度位置信息θ
原
=θ,延时间隔时间δt,返回步骤3.2。间隔
时间δt选取须合适,确保间隔时间δt内大轴旋转的角度不超过2π。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

