技术特征:
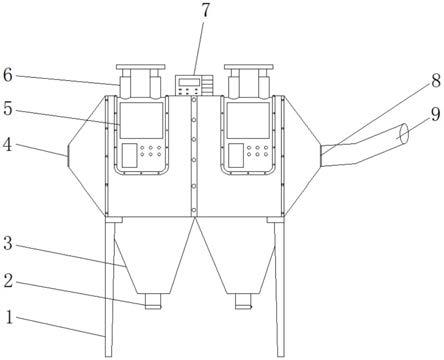
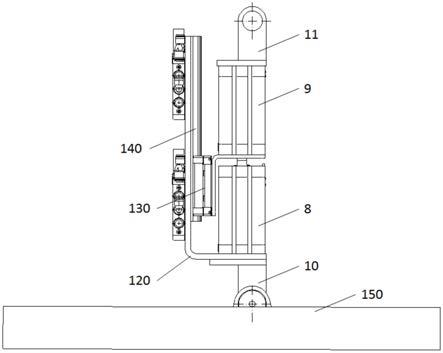
1.一种分拣储料装置,其特征在于,包括:控制部(10);来料部(20),所述来料部(20)用于承接被传送来的待分拣工件;储存部(30),所述储存部(30)设有纵横排列的多个放置格(31);分拣转运部(40),所述分拣转运部(40)设置在来料部(20)与所述储存部(30)之间,所述分拣转运部(40)包括水平运动机构(41)、竖直运动机构(42)和分拣机械手(43),所述水平运动机构(41)安放于地面上,所述竖直运动机构(42)装配在所述水平运动机构(41)上,所述分拣机械手(43)装配在所述竖直运动机构(42)上,所述水平运动机构(41)、所述竖直运动机构(42)和所述分拣机械手(43)均与所述控制部(10)电性连接,所述控制部(10)控制所述水平运动机构(41)带动所述竖直运动机构(42)沿所述水平运动机构(41)的延长方向直线移动,所述控制部(10)控制所述竖直运动机构(42)带动所述分拣机械手(43)沿所述竖直运动机构(42)的延长方向直线移动,所述控制部(10)控制分拣机械手(43)抓取所述待分拣工件并从所述来料部(20)转送至相应的放置格(31)。2.根据权利要求1所述的分拣储料装置,其特征在于,所述分拣机械手(43)包括旋转电机(431)、连接杆(432)和吸盘组件(433),所述旋转电机(431)连接在所述竖直运动机构(42)上,所述连接杆(432)的第一端连接在所述旋转电机(431)的电机转轴上,所述吸盘组件(433)连接在所述连接杆(432)的第二端,所述旋转电机(431)和所述吸盘组件(433)均与所述控制部(10)电性连接。3.根据权利要求2所述的分拣储料装置,其特征在于,所述竖直运动机构(42)包括支撑背板(421)和第一无杆气缸(422),所述支撑背板(421)连接在所述水平运动机构(41)上,所述第一无杆气缸(422) 安装在所述支撑背板(421)上,所述第一无杆气缸(422)与所述控制部(10)电性连接,所述旋转电机(431)连接在所述无杆气缸的第一气缸滑块(423)上。4.根据权利要求3所述的分拣储料装置,其特征在于,所述水平运动机构(41)包括第二无杆气缸(411),所述第二无杆气缸(411)与所述控制部(10)电性连接,所述支撑背板(421)的第一端固定连接在所述第二无杆气缸(411)的第二气缸滑块(413)上。5.根据权利要求4所述的分拣储料装置,其特征在于,所述水平运动机构(41)还包括移动导轨(412),所述移动导轨(412)与所述第二无杆气缸(411)相对且间隔地设置,所述支撑背板(421)的第二端可滑移地装配在所述移动导轨(412)上。6.根据权利要求1至5中任一项所述的分拣储料装置,其特征在于,所述储存部(30)包括壳体架(301)、多个抽屉动力机构和多个存放抽屉(302),所述壳体架(301)形成纵横排列的容置位,所述多个抽屉动力机构安装在所述壳体架(301)上,所述多个抽屉动力机构与所述容置位一一对应,所述多个存放抽屉(302)一一对应地装配在所述容置位中,并且所述抽屉动力机构的动力输出端连接在所述存放抽屉(302)上,其中,各个所述抽屉动力机构均与所述控制部(10)电性连接。7.根据权利要求6所述的分拣储料装置,其特征在于,所述壳体架(301)的底部设置有移动车轮(32)。
8.根据权利要求7所述的分拣储料装置,其特征在于,所述分拣储料装置还包括壳罩(50),所述壳罩(50)设置有相互连通的第一空间(51)、第二空间(52)和第三空间(53),所述分拣转运部(40)设置在所述第二空间(52),所述第一空间(51)用于容纳所述储存部(30),所述第三空间(53)对应所述来料部(20)。9.根据权利要求8所述的分拣储料装置,其特征在于,所述壳罩(50)还设置有第四空间(54),所述控制部(10)安装在所述第四空间(54)内,并且所述第四空间(54)位于所述壳罩(50)的顶部位置。10.一种生产线,包括传送线和至少一个加工操作工位,加工操作工位靠近分布在所述传送线的侧边,其特征在于,该生产线还包括如权利要求1至9中任一项所述的分拣储料装置,所述来料部(20)与所述传送线的输出端对接。
技术总结
本实用新型属于储运设备技术领域,尤其涉及一种分拣储料装置及具有其的生产线。该分拣储料装置包括:控制部;来料部,来料部用于承接被传送来的待分拣工件;储存部,储存部设有纵横排列的多个放置格;分拣转运部,分拣转运部设置在来料部与储存部之间,分拣转运部包括水平运动机构、竖直运动机构和分拣机械手,控制部控制水平运动机构带动竖直运动机构沿水平运动机构的延长方向直线移动,控制部控制竖直运动机构带动分拣机械手沿竖直运动机构的延长方向直线移动,控制部控制分拣机械手抓取待分拣工件并从来料部转送至相应的放置格。应用本技术方案解决了现有技术中生产线采用人工操作收纳加工产品存在费时费力、人工成本高的问题。问题。问题。
技术研发人员:杨章福 伍勇强
受保护的技术使用者:湖南长城计算机系统有限公司
技术研发日:2020.11.13
技术公布日:2021/10/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。