一种自动补料装置
1.优先权要求
2.本技术要求2020年9月24日提交的专利申请no.109212589的优先权,其全部内容并入在此供参考。
技术领域
3.本实用新型涉及一种将不良品的电子组件移除并进行补料的补料装置,特别涉及一种可同时进行移除不良品与补料的自动补料装置。
背景技术:
4.在电子组件的制程中,会通过分选盘对电子组件进行检测及分选的程序,以淘汰不良的电子组件,然而,由于此部分的检测与分选,并无法百分之百检测出不良品,因此在后续的制程中,仍会对电子组件进行检测,以减少产品的不良率。
5.而当后续制程检测出不良品时,最初的方式是直接由工程人员将不良品移除淘汰,但这种人工淘汰的方式也容易产生误差,因此,后来多以自动化机器手臂方式进行不良品的移除及补料动作。
6.但是,此种利用自动化机器手臂的方式,从检测到不良品到补料的过程中,自动手臂必须需先将不良品吸取或夹起,并将不良品移动到废料盒丢弃,接着机器手臂再移动至备料区吸取或夹起良品,然后再移动至原先不良品的位置上,而将良品至于原本不良品的位置上,所以,整个移除及补料的动作耗时相当久,经常会导致整体制程中断,因此,如何加快移除不良组件并进行补料,以避免制程中断而造成的产能下滑,即为相关产业所急需克服的问题。
技术实现要素:
7.为解决现有技术的问题,本实用新型的目的之一是提供一种同时进行移除不良品及补料动作的自动补料装置。
8.为解决现有技术的问题,本实用新型的另一目的是在于提供一种加快补料动作的自动补料装置。
9.为达成上述目的,本实用新型所提供的自动补料装置主要包括一移载机构、一驱动轴及一驱动装置,所述移载机构的轴心开设有一轴孔,所述移载机构周缘向外延伸有与所述轴心垂直的一移除臂及一补料臂,所述移除臂及所述补料臂的自由端均设有一撷取器,且所述移除臂及所述补料臂的撷取器与所述轴孔的距离相同,所述驱动轴的一端与所述轴孔枢接,所述驱动轴相对与所述轴孔枢接的另一端则与所述驱动装置连接。
10.其中,所述撷取器为真空吸取器或夹持机构。
11.其中,所述驱动装置至少包括轴向驱动器及一旋转驱动器。
12.本实用新型所提供的自动补料装置是在电子组件制程中,检测到有不良品(或称为异料)时,通过驱动装置带动移载机构同时利用移除臂移除不良品,及利用补料臂进行补
料,因此相较现有技术可以缩减一半移除不良品及补料的时间,减少因制程中断而造成的产能下滑问题。
附图说明
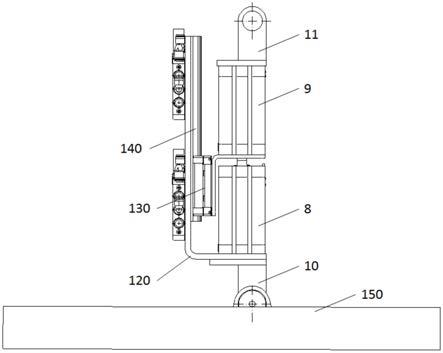
13.图1为本实用新型自动补料装置的立体图;
14.图2为本实用新型自动补料装置的动作示意图之一;
15.图3为本实用新型自动补料装置的动作示意图之二;
16.图4为本实用新型自动补料装置的动作示意图之三。附图说明:
17.1:移载机构;
18.11:主体;
19.12:轴孔;
20.13:移除臂;
21.14:补料臂;
22.15:第一真空吸取器;
23.16:第二真空吸取器;
24.2:驱动轴;
25.3:驱动装置;
26.31:轴向驱动器;
27.32:旋转驱动器;
28.4:异料盒。
具体实施方式
29.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图及具体实施例对本实用新型进行详细描述。而其中所使用的图式,其主旨仅为示意及辅助说明书之用,未必为本实用新型实施后的真实比例与精准配置,故不应就所附图式的比例与配置关系解读、局限本实用新型于实际实施上的权利范围,合先叙明。
30.在本实施方式的描述中,需要理解的是,术语「中心」、「横向」、「上」、「下」、「左」、「右」、「顶」、「底」、「内」、「外」等指示的方位或位置关系为基于图式所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或组件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
31.请参阅图1,本实用新型所提供的自动补料装置主要包括一移载机构1、一驱动轴2及一驱动装置3,所述移载机构1包括有一主体11及由所述主体周缘向外延伸的一移除臂13及一补料臂14,所述主体的轴心开设有一轴孔12,所述移除臂13及补料臂14的自由端均设有一撷取器,其中,所述移除臂13的撷取器为第一真空吸取器15,所述补料臂14的撷取器为第二真空吸取器16,且所述第一真空吸取器15至所述轴孔12的距离与所述第二真空吸取器16至所述轴孔12的距离一致,而所述驱动轴2的两端是分别与所述轴孔12枢接及与所述驱动装置3连接,所述驱动装置3包括一作为轴向驱动器31的气(液)压缸及一作为旋转驱动器32的伺服马达。
32.请参阅图1至4,为本实用新型的一实施例,在本实施例中,本实用新型所提供的自
动补料装置是设置在电子制程设备中,用于输送电子组件的载带装置(图中未示)的侧缘,且所述电子制程设备另包括有一用来检测及分选电子组件的分选盘(图中未示),及一用载盛装不良品的异料盒4。
33.当电子制程设备未检测到载带装置上的电子组件为不良品(或称之为异料)时,所述移载机构1的移除臂13的第一真空吸取器15是位于载带装置3的正上方,而移载机构1的补料臂14的第二真空吸取器16则是位在分选盘的上方,而当电子制程设备的检测装置侦测到载带装置上的电子组件为不良品,且载带装置输送不良品的电子组件移动至移除臂13的正下方时,所述载带装置停止,此时,所述驱动装置3利用轴向驱动器31带动移载机构1向下位移,接着,同时利用第一真空吸取器15吸取载带装置上的不良品,及利用第二真空吸取器16吸取分选盘所分选出的电子组件。
34.然后,所述驱动装置3利用轴向驱动器31带动移载机构1向上位移至原高度,接着,所述驱动装置3利用旋转驱动器32带动移载机构1转动,令所述补料臂14的第二真空吸取器16旋转至所述载带装置上方,同时令移除臂13的第一真空吸取器15旋转至电子制程设备中的异料盒4上方,然后,所述驱动装置3利用轴向驱动器31带动移载机构1向下位移至定点,此时,第一真空吸取器15放开所吸附的不良品,使得不良品落入异料盒4内,而第二真空吸取器16则放开所吸附的电子组件,将电子组件放置在原先载带装置上不良品的位置处。
35.接着,所述驱动装置3利用轴向驱动器31将移载机构1向上抬起,而载带装置也同时启动以输送电子装置继续电子组件制程,然后,驱动装置3利用旋转驱动器32带动移载机构1旋转,令移除臂13的第一真空吸取器15旋转至位于载带装置的正上方,及令补料臂14的第二真空吸取器16旋转至位于分选盘的上方,此时本实用新型所提供的自动补料装置即完成移除不良品与补料的动作。
36.另外,由于部分电子制程设备的机台不同或制程中各站的位置差异,致使移除臂13不方便直接设置在载带装置上方时,本实用新型所提供的自动补料装置,可以在电子制程设备的检测装置侦测到载带装置上的电子组件为不良品的后,再利用驱动装置3的旋转驱动器32带动移除臂13旋转至位于载带装置的正上方,及令补料臂14旋转至位于分选盘的上方,然后再重复前述步骤流程,并在将不良品移至异料盒4及将由分选盘吸起的电子组件放置在原先不良品的位置后,利用旋转驱动器32带动移载机构1旋转,使得移除臂13移动至载带装置与异料盒4的间,及令补料臂14旋转移动至载带装置与分选盘的间,以待下次移除及补料的动作进行。
37.由上所述,本实用新型所提供的自动补料装置,通过移除臂13及补料臂14的同步进行移除不良品及补料的动作,相较现有技术的方式能缩减一半的补料时间,进而大幅减少因制程中断问题而造成产能下滑的问题。
38.以上所述的是本实用新型的优选实施方式,应当指出对于本技术领域的普通人员来说,在不脱离本实用新型所述的原理前提下还可以作出若干改进和润饰,这些改进和润饰也在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。