1.本公开涉及一种物料转移装置,尤其涉及一种无序线材分拣装置、分拣系统和分拣方法。
背景技术:
2.在液晶显示器生产的过程中,需要将线材放入包装箱的指定位置;现有的液晶显示器生产线中,需要人工从筐中拾取线材,然后读码投放,费时费力。
3.但是,当通过机械手实现线材的输送时,由于线材在筐中无序地摆放,线材的绑带透明、倾斜和压叠等情况,一般的相机无法有效地识别线材的绑带的中心位置。
4.而且,即使能够识别线材绑带的中心位置,考虑到线材的绑带是透明的,机械手无法判断该绑带的中心位置的高度信息,无法有效地吸取线材,上料效率低下;甚至当绑带的中心位置的高度信息发生错误时,会造成线材的损坏。
技术实现要素:
5.为了解决上述技术问题之一,本公开提供了一种无序线材分拣装置、分拣系统和分拣方法。
6.根据本公开的一个方面,提供了一种无序线材分拣装置,其包括:
7.安装件,所述安装件具有导向孔,
8.中空轴,所述中空轴的一端设置有吸盘,所述中空轴的另一端设置有限位件,所述中空轴可滑动地设置于所述安装件的导向孔内,并使得所述限位件和吸盘位于所述安装件的两侧;以及
9.弹性件,所述弹性件用于向吸盘提供复位力,以当所述吸盘运动至接近所述安装件的位置时,所述复位力使得所述吸盘远离所述安装件;
10.其中,当向所述中空轴提供负压时,所述吸盘的表面向内凹陷,以通过所述吸盘吸取线材。
11.根据本公开的至少一个实施方式的无序线材分拣装置,所述弹性件套设于所述中空轴,所述弹性件的一端顶设在所述吸盘,另一端顶设在所述安装件。
12.根据本公开的至少一个实施方式的无序线材分拣装置,还包括:
13.导向套,所述导向套固定于所述安装件,并位于所述导向孔内,所述中空轴设置于所述导向套内,并沿所述导向套滑动。
14.根据本公开的至少一个实施方式的无序线材分拣装置,还包括:
15.连接件,所述连接件的一端固定于所述中空轴的一端,所述连接件的另一端固定于所述吸盘。
16.根据本公开的至少一个实施方式的无序线材分拣装置,所述吸盘包括波纹吸盘。
17.根据本公开的至少一个实施方式的无序线材分拣装置,所述线材通过透明绑带捆扎,所述透明绑带上设置有标识部,所述吸盘通过吸取所述标识部处的绑带吸取所述线材。
18.根据本公开的至少一个实施方式的无序线材分拣装置,所述标识部包括所述透明绑带上形成的二维码。
19.根据本公开的另一方面,提供一种无序线材分拣系统,其包括上述的无序线材分拣装置。
20.根据本公开的至少一个实施方式的无序线材分拣系统,还包括:
21.机械臂,所述机械臂包括至少两个自由度,并且所述安装件安装于所述机械臂的末端,通过控制所述机械臂运动,使得所述吸盘以预设的姿态到达预设的位置。
22.根据本公开的至少一个实施方式的无序线材分拣系统,还包括:
23.3d相机,所述3d相机用于获取无序线材的图像;以及
24.主控制器,所述主控制器根据3d相机获取的无序线材的图像,获取图像中至少一个无序线材的标识部的位置数据和角度数据,并将该线材的标识部的位置数据和角度数据发送至机械臂控制器,所述机械臂控制器根据该线材的标识部的位置数据和角度数据控制机械臂动作,并使得所述无序线材分拣装置的吸盘以预设姿态到达吸取位置。
25.根据本公开的至少一个实施方式的无序线材分拣系统,使得所述无序线材分拣装置的吸盘以预设姿态到达吸取位置包括:
26.使得所述吸盘到达所述无序线材的标识部的上方的预设位置,向吸盘施加负压,并使得所述吸盘向下运动,以到达吸取位置。
27.根据本公开的至少一个实施方式的无序线材分拣系统,还包括:
28.压力传感器,所述压力传感器用于检测待吸取的线材向吸盘施加的力;
29.当从所述无序线材的标识部的上方的预设位置向接近待吸取线材的运动过程中,判断压力传感器所检测的压力值是否达到预设阈值:
30.当压力传感器所检测的压力值达到预设阈值时,判断为线材吸取成功,并使得吸盘停止当前运动方向上的运动;
31.否则,判断吸盘的位置是否达到预设位置,当吸盘的位置达到预设位置时,判断为吸取失败;否则,控制吸盘继续沿当前运动方向运动,直至吸盘达到预设位置或者压力传感器所检测的压力值达到预设阈值。
32.根据本公开的另一方面,提供一种无序线材分拣方法,其包括:
33.获取无序线材的图像,其中,无序线材被放置在至少一个存储容器内;
34.根据无序线材的图像,获得图像中的至少一个无序线材的标识部的位置数据和角度数据;
35.根据无序线材的标识部的位置数据和角度数据控制机械臂动作,控制安装于所述机械臂的无序线材分拣装置的吸盘到达所述无序线材的标识部的上方的预设位置,向吸盘施加负压,控制所述吸盘向下运动,使得所述无序线材分拣装置的吸盘以预设姿态到达吸取位置;以及
36.通过压力传感器获取待吸取的线材向吸盘施加的力;
37.其中,当从所述无序线材的标识部的上方的预设位置向接近待吸取线材的运动过程中,判断压力传感器所检测的压力值是否达到预设阈值:
38.当压力传感器所检测的压力值达到预设阈值时,判断为线材吸取成功,并使得吸盘停止当前运动方向上的运动;
39.否则,判断吸盘的位置是否达到预设位置,当吸盘的位置达到预设位置时,判断为吸取失败;否则,控制吸盘继续沿当前运动方向运动,直至吸盘达到预设位置或者压力传感器所检测的压力值达到预设阈值。
40.根据本公开的至少一个实施方式的无序线材分拣方法,当吸盘吸取线材失败后,控制所述机械臂动作,使得吸盘远离待吸取的线材,并准备进行下一次吸取。
41.根据本公开的至少一个实施方式的无序线材分拣方法,当吸盘吸取线材成功后,控制所述机械臂动作,将所述吸盘吸取的线材投放至预设位置。
42.根据本公开的至少一个实施方式的无序线材分拣方法,当根据无序线材的图像无法识别出线材和/或线材的标记部的位置时,提示整理待吸取的线材,或者更换新的容纳有线材的容器。
附图说明
43.附图示出了本公开的示例性实施方式,并与其说明一起用于解释本公开的原理,其中包括了这些附图以提供对本公开的进一步理解,并且附图包括在本说明书中并构成本说明书的一部分。
44.图1是根据本公开的一个实施方式的无序线材分拣装置的结构示意图。
45.图2是根据本公开的一个实施方式的无序线材分拣装置的另一角度的结构示意图。
46.图3是根据本公开的一个实施方式的无序线材分拣装置的另一角度的结构示意图。
47.图4是根据本公开的一个实施方式的无序线材分拣系统的另一角度的结构示意图。
48.图中附图标记具体为:
49.100 无序线材分拣装置
50.110 安装件
51.120 中空轴
52.130 吸盘
53.140 限位件
54.150 弹性件
55.160 导向套
56.170 连接件
57.200 无序线材分拣系统
58.210 机械臂
59.220 3d相机
60.230 主控制器
61.240 压力传感器。
具体实施方式
62.下面结合附图和实施方式对本公开作进一步的详细说明。可以理解的是,此处所
描述的具体实施方式仅用于解释相关内容,而非对本公开的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本公开相关的部分。
63.需要说明的是,在不冲突的情况下,本公开中的实施方式及实施方式中的特征可以相互组合。下面将参考附图并结合实施方式来详细说明本公开的技术方案。
64.除非另有说明,否则示出的示例性实施方式/实施例将被理解为提供可以在实践中实施本公开的技术构思的一些方式的各种细节的示例性特征。因此,除非另有说明,否则在不脱离本公开的技术构思的情况下,各种实施方式/实施例的特征可以另外地组合、分离、互换和/或重新布置。
65.在附图中使用交叉影线和/或阴影通常用于使相邻部件之间的边界变得清晰。如此,除非说明,否则交叉影线或阴影的存在与否均不传达或表示对部件的具体材料、材料性质、尺寸、比例、示出的部件之间的共性和/或部件的任何其它特性、属性、性质等的任何偏好或者要求。此外,在附图中,为了清楚和/或描述性的目的,可以夸大部件的尺寸和相对尺寸。当可以不同地实施示例性实施例时,可以以不同于所描述的顺序来执行具体的工艺顺序。例如,可以基本同时执行或者以与所描述的顺序相反的顺序执行两个连续描述的工艺。此外,同样的附图标记表示同样的部件。
66.当一个部件被称作“在”另一部件“上”或“之上”、“连接到”或“结合到”另一部件时,该部件可以直接在所述另一部件上、直接连接到或直接结合到所述另一部件,或者可以存在中间部件。然而,当部件被称作“直接在”另一部件“上”、“直接连接到”或“直接结合到”另一部件时,不存在中间部件。为此,术语“连接”可以指物理连接、电气连接等,并且具有或不具有中间部件。
67.为了描述性目的,本公开可使用诸如“在
……
之下”、“在
……
下方”、“在
……
下”、“下”、“在
……
上方”、“上”、“在
……
之上”、“较高的”和“侧(例如,如在“侧壁”中)”等的空间相对术语,从而来描述如附图中示出的一个部件与另一(其它)部件的关系。除了附图中描绘的方位之外,空间相对术语还意图包含设备在使用、操作和/或制造中的不同方位。例如,如果附图中的设备被翻转,则被描述为“在”其它部件或特征“下方”或“之下”的部件将随后被定位为“在”所述其它部件或特征“上方”。因此,示例性术语“在
……
下方”可以包含“上方”和“下方”两种方位。此外,设备可被另外定位(例如,旋转90度或者在其它方位处),如此,相应地解释这里使用的空间相对描述语。
68.这里使用的术语是为了描述具体实施例的目的,而不意图是限制性的。如这里所使用的,除非上下文另外清楚地指出,否则单数形式“一个(种、者)”和“所述(该)”也意图包括复数形式。此外,当在本说明书中使用术语“包含”和/或“包括”以及它们的变型时,说明存在所陈述的特征、整体、步骤、操作、部件、组件和/或它们的组,但不排除存在或附加一个或更多个其它特征、整体、步骤、操作、部件、组件和/或它们的组。还要注意的是,如这里使用的,术语“基本上”、“大约”和其它类似的术语被用作近似术语而不用作程度术语,如此,它们被用来解释本领域普通技术人员将认识到的测量值、计算值和/或提供的值的固有偏差。
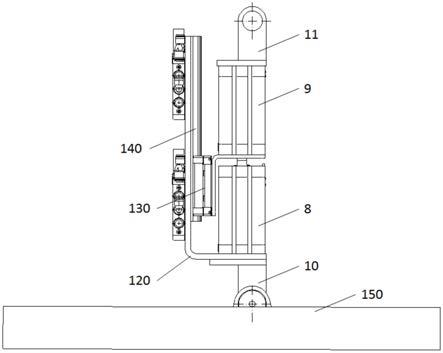
69.图1是根据本公开的一个实施方式的无序线材分拣装置100的结构示意图。图2是根据本公开的一个实施方式的无序线材分拣装置的另一角度的结构示意图。图3是根据本公开的一个实施方式的无序线材分拣装置的另一角度的结构示意图。
70.如图1至图3所示,本公开提供一种无序线材分拣装置100,其包括:
71.安装件110,所述安装件110具有导向孔,
72.中空轴120,所述中空轴120的一端设置有吸盘130,所述中空轴120的另一端设置有限位件140,所述中空轴120可滑动地设置于所述安装件110的导向孔内,并使得所述限位件140和吸盘130位于所述安装件110的两侧;以及
73.弹性件150,所述弹性件150用于向吸盘130提供复位力,以当所述吸盘130运动至接近所述安装件110的位置时,所述复位力使得所述吸盘130远离所述安装件110;
74.其中,当向所述中空轴120提供负压时,所述吸盘130的表面向内凹陷,以通过所述吸盘130吸取线材。
75.本公开的无序线材分拣装置100在吸取线材时,能够通过缓冲作用能够有效地防止对线材造成损坏,即使在未准确识别线材的标识部的情况下,也能有效地吸取线材。
76.本公开中,所述弹性件150套设于所述中空轴120,所述弹性件150的一端顶设在所述吸盘130,另一端顶设在所述安装件110,以通过所述弹性件150提供的恢复力使得吸盘130接触线材时,能够具有缓冲效果。
77.本公开中,优选地,所述的无序线材分拣装置100还包括:
78.导向套160,所述导向套160固定于所述安装件110,并位于所述导向孔内,所述中空轴120设置于所述导向套160内,并沿所述导向套160滑动。
79.本公开的一个实施例中,所述的无序线材分拣装置100还包括:
80.连接件170,所述连接件170的一端固定于所述中空轴120的一端,所述连接件170的另一端固定于所述吸盘130,此时,所述弹性件150的下端可以顶设在所述连接件上。
81.作为一种实现形式,所述吸盘130包括波纹吸盘130。
82.本公开中,所述线材通过透明绑带捆扎,所述透明绑带上设置有标识部,所述吸盘130通过吸取所述标识部处的绑带吸取所述线材;更优选地,所述标识部包括所述透明绑带上形成的二维码。
83.图4是根据本公开的一个实施方式的无序线材分拣系统的另一角度的结构示意图。
84.根据本公开的另一方面,如图4所示,本公开提供一种无序线材分拣系统200,其包括上述的无序线材分拣装置100。
85.本公开中,所述的无序线材分拣系统200还包括:
86.机械臂210,所述机械臂210包括至少两个自由度,并且所述安装件110安装于所述机械臂210的末端,通过控制所述机械臂210运动,使得所述吸盘130以预设的姿态到达预设的位置。
87.更优选地,所述的无序线材分拣系统200还包括:
88.3d相机220,所述3d相机220用于获取无序线材的图像;以及
89.主控制器230,所述主控制器230根据3d相机220获取的无序线材的图像,获取图像中至少一个无序线材的标识部的位置数据和角度数据,并将该线材的标识部的位置数据和角度数据发送至机械臂210控制器,所述机械臂210控制器根据该线材的标识部的位置数据和角度数据控制机械臂210动作,并使得所述无序线材分拣装置100的吸盘130以预设姿态到达吸取位置。
90.根据本公开的至少一个实施方式,使得所述无序线材分拣装置100的吸盘130以预设姿态到达吸取位置包括:
91.使得所述吸盘130到达所述无序线材的标识部的上方的预设位置,并向所述吸盘130施加负压,并使得所述吸盘130向下运动,以到达吸取位置。
92.本公开中,所述的无序线材分拣系统200还包括:
93.压力传感器240,所述压力传感器240用于检测待吸取的线材向吸盘130施加的力;
94.当从所述无序线材的标识部的上方的预设位置向接近待吸取线材的运动过程中,判断压力传感器240所检测的压力值是否达到预设阈值:
95.当压力传感器240所检测的压力值达到预设阈值时,判断为线材吸取成功,并使得吸盘130停止当前运动方向上的运动,并且控制所述机械臂的动作,使得吸盘130远离吸取位置,并将吸取的线材放置在指定位置。
96.否则,判断吸盘130的位置是否达到预设位置,当吸盘130的位置达到预设位置时,判断为吸取失败;否则,控制吸盘130继续沿当前运动方向运动,直至吸盘130达到预设位置或者压力传感器240所检测的压力值达到预设阈值。
97.根据本公开的另一方面,提供一种无序线材分拣方法,其包括:
98.获取无序线材的图像,其中,无序线材被放置在至少一个存储容器内;
99.根据无序线材的图像,获得图像中的至少一个无序线材的标识部的位置数据和角度数据;
100.根据无序线材的标识部的位置数据和角度数据控制机械臂210动作,控制安装于所述机械臂210的无序线材分拣装置100的吸盘130到达所述无序线材的标识部的上方,例如到达无序线材的标识部的上方50mm处,并向吸盘施加负压,控制所述吸盘130向下运动,使得所述无序线材分拣装置100的吸盘130以预设姿态到达吸取位置;以及
101.通过压力传感器240获取待吸取的线材向吸盘130施加的力;
102.其中,当从所述无序线材的标识部的上方的预设位置向接近待吸取线材的运动过程中,判断压力传感器240所检测的压力值是否达到预设阈值:
103.当压力传感器240所检测的压力值达到预设阈值时,判断为线材吸取成功,并使得吸盘130停止当前运动方向上的运动;
104.否则,判断吸盘130的位置是否达到预设位置,当吸盘130的位置达到预设位置时,判断为吸取失败;否则,控制吸盘130继续沿当前运动方向运动,直至吸盘130达到预设位置(例如,)或者压力传感器240所检测的压力值达到预设阈值。
105.本公开中,更优选地,当吸盘130吸取线材失败后,控制所述机械臂210动作,使得吸盘130远离待吸取的线材,并准备进行下一次吸取。
106.另一方面,当吸盘130吸取线材成功后,控制所述机械臂210动作,将所述吸盘130吸取的线材投放至预设位置,例如将吸取的线材放置到读码平台。
107.根据本公开的至少一个实现形式,当根据无序线材的图像无法识别出线材和/或线材的标记部的位置时,提示整理待吸取的线材,或者更换新的容纳有线材的容器。
108.在本说明书的描述中,参考术语“一个实施例/方式”、“一些实施例/方式”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例/方式或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例/方式或示例中。在本说明书中,对上
述术语的示意性表述不必须针对的是相同的实施例/方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例/方式或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例/方式或示例以及不同实施例/方式或示例的特征进行结合和组合。
109.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
110.本领域的技术人员应当理解,上述实施方式仅仅是为了清楚地说明本公开,而并非是对本公开的范围进行限定。对于所属领域的技术人员而言,在上述公开的基础上还可以做出其它变化或变型,并且这些变化或变型仍处于本公开的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。