基于ccd检测和皮带供料的建筑垃圾分选系统和方法
技术领域
1.本发明涉及建筑垃圾分选技术领域,特别涉及一种基于ccd检测和皮带供料的建筑垃圾分选系统和方法。
背景技术:
2.城市的老旧建筑等拆除之后会有大量的水泥块及红砖块块等混合在一起,目前市场上主要是使用人工的方式对大块的红砖块块和水泥块进行分选,对于红砖块和水泥块进行粗略分类,对于红砖块与水泥混合的块状物基本按照红砖块进行处理,以及现有的装置只能对建筑垃圾中的水泥和红砖块进行粗分选,而对于水泥和红砖块的混合部分无法进行进一步的分选处理,导致分选后的水泥和红砖块的纯度不高,无法有效进行分类回收并利用。
技术实现要素:
3.(一)发明目的鉴于上述问题,本发明的目的是提出一种基于ccd检测和皮带供料的建筑垃圾分选系统和方法,可有效的对水泥块和红砖块进行分选,分选后的产品纯度高,保证水泥块中混有红砖块数量在5%以内,可将纯度较高的产品根据产品的材质不同应用在不同的场合,提高产品的再生利用价值,本发明公开了以下技术方案。
4.(二)技术方案作为本发明的第一方面,本发明公开了一种基于ccd检测和皮带供料的建筑垃圾分选系统,包括:振动供料装置,包括进料口和出料口,混合物料从所述进料口进入振动供料装置,所述振动供料装置对混合物料进行初步筛选;皮带输送装置,设于所述振动供料装置的出料口下方,用于输送由所述振动供料装置以平铺的方式输出的混合物料;线扫描相机,设于所述皮带输送装置的末端,用于采集从所述皮带输送装置上脱离的混合物料的图像;工控机,用于对采集到的所述图像进行读取和运算,计算出红砖块和水泥块的坐标范围,并根据红砖块和水泥块的坐标范围,计算出电磁阀的编号与动作延迟时间,并将控制分装装置运动;分选装置,设于所述皮带输送装置下方,所述分选装置包括若干个电磁阀,所述电磁阀利用高压气流对混合物料中的水泥块和红砖块进行分选;收集装置包括两个收集箱,分别用于存放水泥块和红砖块。
5.在一种可能的实施方式中,所述分选系统还包括光源,所述光源设于所述皮带输送装上方,用于为所述线扫描相机采集图像提供光源。
6.在一种可能的实施方式中,所述分选系统还包括破碎机和提升机,所述破碎机包
括料仓入口、料仓和料仓出口,将待分选的混合物料从所述料仓入口进入所述料仓中进行破碎,破碎后的混合物料从所述料仓出口进入提升机上,利用提升机将混合物料输送至所述振动供料装置的进料口。
7.在一种可能的实施方式中,所述工控机包括图像处理模块、计算模块、分区模块和控制模块;所述分区模块用于对所述图像进行分割成若干个区域,并对每个区域进行单独编号;所述图像处理模块用于对每个区域内的图像进行处理,将rgb转化为hsv的三色计算标准;所述计算模块用于计算电磁阀编号和电磁阀延时时间;所述控制模块用于根据计算出的电磁阀编号和电磁阀延时时间控制相应的电磁阀启动。
8.在一种可能的实施方式中,若干个所述电磁阀呈矩阵方式排列组合,其中相邻两个所述电磁阀之间的距离小于红砖块的颗粒直径。
9.作为本发明的第二方面,本发明还公开了一种基于ccd检测和皮带供料的建筑垃圾分选方法,包括:对混合物料进行初步筛选,并将初步筛选后的混合物料以平铺的方式输送至皮带输送装置上;采集从所述皮带输送装置上脱离的混合物料的图像;对采集到的所述图像进行读取和运算,计算出红砖块和水泥块的坐标范围,并根据红砖块和水泥块的坐标范围,计算出电磁阀的编号与动作延迟时间;控制相应的电磁阀开启,并利用高压气流对混合物料中的水泥块和红砖块进行分选。
10.在一种可能的实施方式中,所述对采集到的所述图像进行读取和运算,计算出红砖块和水泥块的坐标范围,并根据红砖块和水泥块的坐标范围,计算出电磁阀的编号与动作延迟时间,具体包括:将所述图像分割成若干个区域,并对每个区域进行单独编号;对每个区域内的图像进行处理,将rgb转化为hsv的三色计算标准;计算每个区域内红色像素的比例值,若红色像素的比例至大于阈值,则该区域标记为红砖块区域;利用红砖块区域内红砖块最左边对应的坐标和红砖块最右边对应的坐标,计算电磁阀编号;利用混合物料下落的时间和处理图像的时间,计算电磁阀延时时间。
11.在一种可能的实施方式中,所述红砖块最左边对应的坐标,公式如下:式中:为红砖块最左边对应的坐标,为红砖块区域最左边像素点坐标,整幅图对应的电磁阀的总个数,为整幅图像的水平方向总像素个数。
12.在一种可能的实施方式中,所述红砖块最右边对应的坐标,公式如下:
式中:为红砖块最左边对应的坐标,为红砖块区域最右边像素点坐标,整幅图对应的电磁阀的总个数,为整幅图像的水平方向总像素个数。
13.在一种可能的实施方式中,所述计算电磁阀延时时间,公式如下:计算混合物料到达ccd拍摄位置时所需要的时间:式中:为ccd拍摄位置距离皮带的高度,g为重力加速度;计算混合物料到达电磁阀位置所需的时间:式中:为电磁阀距离皮带的高度,g为重力加速度;计算电磁阀延时时间:式中:为ccd处理图像的实际时间。
14.(三)有益效果本发明公开的一种基于ccd检测和皮带供料的建筑垃圾分选系统和方法,具有如下有益效果:1、利用振动供料装置对混合物料进行粗步筛选,以保证混合物料的颗粒直径应保持在15mm
‑
50mm之间,防止颗粒过大或过小增加分选难度。
15.2、振动供料装置在振动之后将混合物料在出口处以平铺的方式输出,从而确保皮带输送装置上的混合物料能均匀分布,避免叠料情况发生。
16.3、皮带输送装置保持在1.5m/s
‑
3m/s范围内运行,可以确保混合物料在飞出皮带时有足够高的速度,能与皮带线尽快脱离,从而方便光源和相机能得到更清晰,效果更好的图像。
17.4、工控机对采集的图像进行读取和运算,利用图像处理办法,找出图像中的红砖块和水泥块的坐标范围,并计算出吹出红砖块所需要的电磁阀的编号和动作延时时间,利用以上方式,可准确、高效的将混合物料中红砖块和水泥块分离。
18.5、电磁阀呈选用高频快速响应大流量电磁阀,确保电磁阀开关的响应速度在5ms以内,且流量在150l/min以上,从而确保能在短时间内有足够量的气体吹出,将需分选的红砖块或水泥块带走。
19.6、在拍摄的图像中,电磁阀的总数远大于红砖块的个数,且相邻两个电磁阀之间的间距为5
‑
10mm,平均分布,可保证每颗红砖块下落时所对应的电磁阀数量至少为3个,从而保证有足够数量的电磁阀同时工作,提供足够的气流量将红砖块吹出。
20.7、在图像处理模块,采用分水冷算法对误判为一个的分区进行纠正,确保分选的精确度。
附图说明
21.以下参考附图描述的实施例是示例性的,旨在用于解释和说明本发明,而不能理解为对本发明的保护范围的限制。
22.图1是本发明公开的一种基于ccd检测和皮带供料的建筑垃圾分选系统的结构图;图2是本发明公开的一种基于ccd检测和皮带供料的建筑垃圾分选系统的示意图;图3是本发明公开的一种基于ccd检测和皮带供料的建筑垃圾分选系统的工作流程图;图4是本发明公开的一种基于ccd检测和皮带供料的建筑垃圾分选方法的流程图;图5是本发明公开的计算出电磁阀的编号与动作延迟时间的流程图。
23.附图标记:100、振动供料装置;200、皮带输送装置;300、线扫描相机;400、工控机;410、图像处理模块;420、计算模块;430、分区模块;440、控制模块;500、电磁阀;600、水泥块收集箱、700、红砖块收集箱;800、光源。
具体实施方式
24.为使本发明实施的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行更加详细的描述。
25.需要说明的是:在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施例是本发明一部分实施例,而不是全部的实施例,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制。
27.下面参考图1
‑
3详细描述本发明公开的一种基于ccd检测和皮带供料的建筑垃圾分选系统的第一实施例。本实施例主要应用于建筑垃圾分选,针对混合物料的颗粒直径保持在15mm
‑
50mm范围内,可有效的对水泥块和红砖块进行分选,分选后的产品纯度高,保证水泥块中混有红砖块数量在5%以内,可将纯度较高的产品根据产品的材质不同应用在不同的场合,提高产品的再生利用价值。
28.如图1
‑
2所示,本实施例主要包括振动供料装置100、皮带输送装置200、线扫描相机300、工控机400、分选装置和收集装置。
29.振动供料装置100包括振动电机、料仓和支撑座,料仓的一端为进料口,另一端为出料口,支撑座设置在料仓下方,用于支撑料仓,料仓的进料口在竖直方向上的位置高于出料口的位置,使其料仓与地面具有一定的斜度,其斜度范围为5度
‑
15度之间。将含有红砖块和水泥块的混合物从进料口投入至料仓中,在振动电机的作用下,对混合物料进行初步筛选,在初步筛选同时,混合物料会缓慢的朝向出料口方向运动,从而达到初步筛选和平铺的
效果。
30.振动供料装置100对混合物料进行初步筛选,使其混合物料的颗粒直径保持在15mm
‑
50mm范围内,避免混合物料的颗粒直径过大或过小,增加分选难度,例如大颗粒直径的产品可能出现气流量不够导致产品无法排出,小颗粒直径的产品可能会由于重叠等其他原因导致无法排出。
31.料仓底部安装有两个一直运行的振动电机,振动电机优选为偏心电机,在振动电机动作过程中,混合物料也会受振动电机的作用作垂直于料仓的运动,同时受重力作用下会向下运动,运动过程中混合物料之间也会由于碰撞导致运动方向与轨迹发生变化,从而使混合物料更倾向于运动到混合物料密度不高的位置,从而避免了混合物料的叠料情况,另外混合物料在运动过程中受重力的作用向下运动,不同混合物料的成分的重量不同,所受的重力及摩擦力也不一致,从而使混合物料在运动过程中进一步分开,也可以避免叠料的情况发生。
32.皮带输送装置200设于振动供料装置100的出料口下方,用于输送由振动供料装置100以平铺的方式输出的混合物料。皮带输送装置200包括驱动电机、皮带、主动辊和从动辊,皮带套设于主动辊和从动辊外侧,驱动电机的输出轴与主动辊固定连接,驱动电动带动主动辊转动,从而带动皮带运动,皮带运输初步筛选后的混合物料,混合物料在皮带的末端依次以抛物线的轨迹脱离皮带末端。
33.进一步,驱动电机可采用带有减速机的三相异步电机,驱动电机驱动皮带运行到设定的速度,并稳定在此速度运行。皮带会带动皮带上的含水泥和红砖块的混合物料迅速达到皮带的运行速度,并保持与皮带相对静止的速度运行。一般皮带运行速度保持在1.5m/s
‑
3m/s范围内,皮带在此范围内运行时,可以确保混合物料在飞出皮带时有足够高的速度,能与皮带尽快脱离,从而方便线扫描相机300能得到更清晰、效果更好的图像。
34.线扫描相机300,设于皮带输送装置200的末端,且线扫描相机300的摄像头朝向皮带输送装置200的末端,用于采集从皮带输送装置200上脱离的混合物料的图像,并将采集的图像发送至工控机400。
35.进一步,混合物料在皮带末端依次以抛物线的轨迹脱离皮带,在下落到达线扫描相机300拍照范围内时,线扫描相机300会在短时间内,例如10ms
‑
30ms内拍摄并生成一张混合物料的图片传输至工控机400内。
36.进一步,线扫描相机300可采用高速线彩色线扫描相机,其像元尺寸为3.5um
‑
7um,可以确保其像素精度。
37.进一步,线扫描相机300距离混合物料的位置在1400mm
‑
1600mm范围内最佳,在此距离范围内时,可以确保线扫描相机300刚好能够覆盖皮带上所有掉落的混合物料,同时也可以充分利用线扫描相机300内部的每一个像素,提供足够高的图片的清晰度。
38.进一步,线扫描相机300采用ccd相机,高速采集从皮带输送装置200上脱离的混合物料的图像,并将图像传送至工控机。
39.工控机400内部的软件会针对采集到的图像进行读取和运算,利用图像处理的方法,分别找出图像中的红砖块与水泥块,并计算和记录红砖块和水泥块的坐标范围,根据红砖块和水泥块的坐标范围,并计算在吹出红砖块的过程中,需要动作的电磁阀500的编号与动作延迟时间,并将电磁阀500的编号和动作延迟时间发送给分选装置。
40.分选装置,设于皮带输送装置200下方,分选装置包括若干个电磁阀500,电磁阀500利用高压气流对混合物料中的水泥块和红砖块进行分选。根据工控机400发送的电磁阀编号和动作延迟时间,相应的电磁阀500接收到信号后,开始吹气,将所需分选的红砖块吹出。
41.进一步,电磁阀500可采用高速电磁阀,高速电磁阀选用高频快速响应大流量电磁阀,确保电磁阀500开关的响应速度在5ms以内,且流量在150 l/min以上,从而确保能在短时间内有足够量的气体吹出,将混合物料中需分选的红砖块或水泥块带走。
42.收集装置设于皮带输送装置200下方,用于收集分选后的产品,收集装置包括两个收集箱,分别为存放水泥块的水泥块收集箱600和存放红砖块的红砖块收集箱700。
43.进一步,分选完成后,水泥块收集箱600和红砖块收集箱700下部可以放置两条不同的皮带线,将水泥与红砖块分别运输至不同的地方,从而完成建筑垃圾材质的分选。
44.在一种实施方式中,分选系统还包括光源800,光源800设于皮带输送装上方,用于为线扫描相机300采集图像提供光源800。
45.本实施例中的光源800为线扫描相机300专用光源,光源800安装在距离混合物料掉落位置150mm
‑
400mm范围内,光源800色温为6000k
‑
10000k,光源800原生亮度为100万lux,光源800颜色为白色。
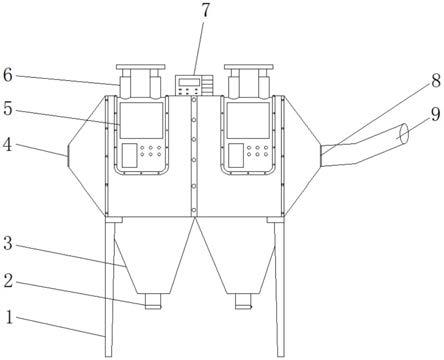
46.如图3所示,在一种实施方式中,分选系统还包括破碎机和提升机,破碎机包括料仓入口、料仓和料仓出口,将待分选的混合物料从料仓入口进入料仓中进行破碎,破碎后的混合物料从料仓出口进入提升机上,利用提升机将混合物料输送至振动供料装置100的进料口。
47.本实施例中,破碎机先将混合物料破碎,并将破碎完成之后的混合物料通过提升机传输至振动供料装置100,振动供料装置100对破碎后的混合物料进行初步筛选,进过初步筛选后,将颗粒直径大于50mm的混合物料重新投入至破碎机内,再次进行破碎,将颗粒直径小于15mm的混合物料投入粉尘收集箱进行收纳。
48.在一种实施方式中,若干个电磁阀500呈矩阵方式排列组合,其中相邻两个电磁阀500之间的距离小于红砖块的颗粒直径。
49.本实施例中,电磁阀500矩阵由100
‑
130个高速电磁阀500排列组成,电磁阀500的喷射孔在水平方向平均分布,每个电磁阀500喷射孔对应皮带上的指定范围,用于喷射从指定范围内掉落的需喷射的产品。
50.经过高速电磁阀500矩阵时,水泥块不会被电磁阀500干扰,会沿着抛物线原有的曲线下落,掉落至水泥块收集箱600,而红砖块会被电磁阀500气流干扰,改变原有的抛物线曲线,掉落至红转收集箱,从而将红砖块与水泥块分开在两个收集箱中。
51.每相邻两个电磁阀500之间的间距为5mm
‑
10mm,以保证每颗红砖块下落时所对应的电磁阀500的数量至少为3个,电磁阀500的总数会远大于红砖块的个数。根据颗粒直径的不同,覆盖的电磁阀500可能会达到10个,从而保证有足够数量的电磁阀500同时工作,提供足够的气流量将红砖块吹出。例如,对于小的红砖块,本身质量较小,排出时所需的气流量也较小,检测出来的红砖块所占面积小,喷气的喷嘴也较少,所需消耗的气流量也较少;对于大块红砖块,检测出来所占的面积大,本身重量更重,也需要更大的气流量才能吹出,利用计算和检测的结果,对于不同质量和重量的红砖块,对应开启不同数量的电磁阀500。
52.在一种实施方式中,工控机400包括图像处理模块410、计算模块420、分区模块430和控制模块440,其中分区模块430用于对图像进行分割成若干个区域,并对每个区域进行单独编号。
53.图像处理模块410接收到ccd高速采集图像,并对采集的每个区域内的图像进行处理,将rgb转化为hsv的三色计算标准,在图像处理过程中,由于混合物料与黑色背景有较大的区别,可通过过滤波处理排除掉图像中的干扰项,并对每一个物料进行单独分析,由于采用彩色线扫描相机300,可以将图像中rgb的色彩转换为hsv的三色计算标准,进而可以分析颜色的占比情况,判断当前图像是否为红砖块。
54.计算模块420用于计算电磁阀500编号和电磁阀500延时时间,利用红砖块区域内红砖块最左边对应的坐标和红砖块最右边对应的坐标,计算电磁阀500编号;利用混合物料下落的时间和处理图像的时间,计算电磁阀500延时时间。
55.控制模块440用于根据计算出的电磁阀500编号和电磁阀500延时时间控制相应的电磁阀500启动,控制模块440根据计算模块420计算出的电磁阀500编号和动作延迟时间,开启相对应的电磁阀500,电磁阀500开始吹气,将所需分选的红砖块吹出。
56.下面参考图4和图5详细描述,基于同一发明构思,本发明实施例还提供了一种基于ccd检测和皮带供料的建筑垃圾分选方法的第一实施例。由于该方法所解决问题的原理与前述一种基于ccd检测和皮带供料的建筑垃圾分选系统相似,因此该方法的实施可以参见前述系统的实施,重复之处不再赘述。本实施例主要应用于建筑垃圾分选,针对混合物料的颗粒直径保持在15mm
‑
50mm范围内,可有效的对水泥块和红砖块进行分选,分选后的产品纯度高,保证水泥块中混有红砖块数量在5%以内,可将纯度较高的产品根据产品的材质不同应用在不同的场合,提高产品的再生利用价值。
57.如图4所示,本实施例主要包括以下步骤:s10、对混合物料进行初步筛选,并将初步筛选后的混合物料以平铺的方式输送至皮带输送装置上;s20、采集从皮带输送装置上脱离的混合物料的图像;s30、对采集到的图像进行读取和运算,计算出红砖块和水泥块的坐标范围,并根据红砖块和水泥块的坐标范围,计算出电磁阀的编号与动作延迟时间;s40、控制相应的电磁阀开启,并利用高压气流对混合物料中的水泥块和红砖块进行分选。
58.在步骤s10中,对混合物料进行初步筛选,并将初步筛选后的混合物料以平铺的方式输送至皮带输送装置上,具体包括:利用振动供料装置对混合物料进行初步筛选,使其混合物料的颗粒直径保持在15mm
‑
50mm范围内,在振动电机动作过程中,混合物料也会受振动电机的作用作垂直于料仓的运动,同时受重力作用下会向下运动,运动过程中混合物料之间也会由于碰撞导致运动方向与轨迹发生变化,从而使混合物料更倾向于运动到混合物料密度不高的位置,从而避免了混合物料的叠料情况。
59.在步骤s20中,采集从皮带输送装置上脱离的混合物料的图像,具体包括:皮带输送装置输送混合物料的过程中,混合物料在皮带的末端依次以抛物线的轨迹脱离,在下落到达线扫描相机300拍照范围内时,线扫描相机300会在短时间内拍摄下落的混合物料图
像,并将图像发送至工控机。
60.如图5所示,在步骤s30中,对采集到的图像进行读取和运算,计算出红砖块和水泥块的坐标范围,并根据红砖块和水泥块的坐标范围,计算出电磁阀的编号与动作延迟时间,具体包括以下步骤:s31、将图像分割成若干个区域,并对每个区域进行单独编号;s32、对每个区域内的图像进行处理,将rgb转化为hsv的三色计算标准;s33、计算每个区域内红色像素的比例值,若红色像素的比例至大于阈值,则该区域标记为红砖块区域;s34、利用红砖块区域内红砖块最左边对应的坐标和红砖块最右边对应的坐标,计算电磁阀编号;s35、利用混合物料下落的时间和处理图像的时间,计算电磁阀延时时间。
61.在步骤s31中,在工控机接收到图像之后,对图像进行分割处理,将图像中有物质的区域单独切割并将每个区域单独编号,在切割过程中,会遇到红砖块与水泥块紧密挨着的情况,此时红砖块与泥块之间会有一条明显的分界线,分界线左边与右边的颜色差异较大,此时采用分水岭算法对图像进行处理,将原本可能误判为一个区域的结果纠正为两个区域,即红砖块与水泥块为两个紧挨的不同区域。
62.在步骤s32中,对每个区域内的图像进行rgb转hsv处理,将rgb的彩色转换为hsv的三色计算标准,便于利用红色标准像素判断该区域是否为红砖块或是水泥块。
63.在步骤s33中,对每个区域进行单独计算,将每个区域内符合红色标准的像素点数进行计数,计算完成之后用红色像素的个数除以此区域的总像素个数,得到红色像素的比例值,若比例值高于所设置的阈值,则将此区域标记为红砖块,否则标记为水泥块。
64.在步骤s34中,对于所有标记为红砖块的区域,找出其最左边的像素点坐标与最右边的像素点坐标,使用与除以水平方向总像素个数,则可计算出此像素所占有的像素区域对应的电磁阀的编号,重复对所有的红砖块进行计算,得到所有红砖块的区域,其计算公式如下:红砖块最左边对应的坐标,公式如下:式中:为红砖块最左边对应的坐标,为红砖块区域最左边像素点坐标,整幅图对应的电磁阀的总个数,为整幅图像的水平方向总像素个数。
65.红砖块最右边对应的坐标,公式如下:式中:为红砖块最左边对应的坐标,为红砖块区域最右边像素点坐标,整幅图对应的电磁阀的总个数,为整幅图像的水平方向总像素个数。
66.则与之间的电磁阀均为红砖块所对应的电磁阀,因此可获得红砖块所对应电磁阀的编号。
67.在步骤s35中,皮带输送装置高度当作基准面,ccd拍摄位置距离皮带的高度为,吹气阀距离皮带的高度为,ccd图像处理所需的时间为,混合物料离开皮带时,为平抛
运动,水平方向为匀速运动,竖直方向可以等效为自由落体运动,其计算公开如下:计算混合物料到达ccd拍摄位置时所需要的时间:式中:为ccd拍摄位置距离皮带的高度,g为重力加速度;计算混合物料到达电磁阀位置所需的时间:式中:为电磁阀距离皮带的高度,g为重力加速度;最终电磁阀延时所需时间:式中:为ccd处理图像的实际时间。
68.在获得电磁阀的编号和动作延时时间后,触发红砖块区域所对应的电磁阀工作,吹出红砖块,将含有红砖块和水泥块的混合物料进行有效的分选。
69.进一步,ccd拍摄位置即为线扫描相机300的位置。
70.本实施例的振动供料装置、工控机、线扫描相机300等部件的具体结构均可参照前述一种基于ccd检测和皮带供料的建筑垃圾分选系统的第一实施例所描述的结构设置,不再一一赘述。
71.以上,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。